
光伏发电系统中MPPT控制算法的研究及仿真
2011-01-31 09:15陈公兴
科学之友 2011年10期
陈公兴
(广东技术师范学院天河学院,广东 广州 510540)
随着能源危机以及环境污染问题的日益严重,世界各国对能源尤其是再生能源越来越重视,不断加大对再生能源研究的资金投入。光伏发电系统没有机械运动部件,具有无污染、无噪音、清洁、安全、寿命长、资源永不枯竭等特点,特别是由于其独特的模块化结构,太阳能被广泛的运用到各个领域中。光伏产业在不断的兴起,它将成为将来的主导能源之一,在再生能源中有着不可替代的重要作用。
1 光伏发电系统
1.1 光伏发电系统的组成
光伏发电系统主要是由光伏阵列、DC/DC变换器、负载和MPPT控制器组成的。MPPT控制器通过分析太阳能阵列的输出参数以及负载处的工作参数来改变DC-DC变换器的输出来完成对最大功率点(MPP)的跟踪,这些参数包括电压、电流和功率。
1.2 太阳能电池的光伏特性
影响太阳能电池光伏特性的因素很多,主要因素是温度和日照,从而它的输出具有非线性特性,图1和图2分别给出了太阳能电池的伏安特性和伏瓦特性。
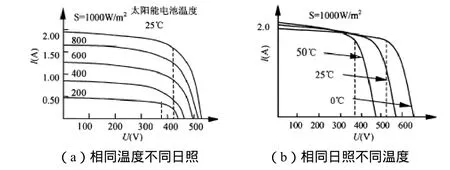
图1 太阳能的伏安特性
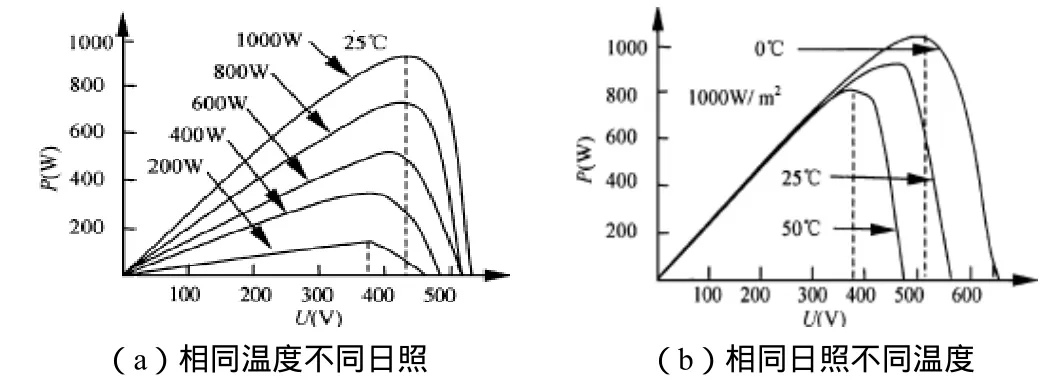
图2 太阳能的伏瓦特性
从图中可以看出,太阳能的最大功率点随着日照和太阳能电池自身温度的改变而变化的,而这两个外在因素存在着极大的不确定性、无规律性,因此为太阳能光伏系统建立一个精准的系统模型相当难。最大功率跟踪的方法有扰动观测法和模糊和神经网络控制法等等。
2 MPPT控制算法原理
MPPT算法最大特点是能独立于光伏特性之外,即无需考虑外界气候环境等因素对光伏阵列的影响,控制系统总能找到相应的MPP,是一种在数学意义上追踪最大功率点的方法。下面对MPPT算法进行叙述。
扰动观测法是绝大多数 MPPT控制系统所采用的“爬山法”,通常对电压进行扰动,称为电压扰动观测法。其基本原理是通过不断改变光伏阵列的输出电压VPV来判断独立光伏系统的输出功率是否达到最大点。控制的基本过程:t1时刻,控制系统采样,独立光伏系统输出电压VPV(t1)和电流IPV(t1),计算出t1时刻的光伏阵列的输出功率P(t1)并保存,然后对光伏阵列的输出电压VPV(t1)施加△V的扰动,在t2时刻同样采样、计算得到 P(t2),然后比较 P(t1)和 P(t2)的大小。如果P(t1)>P(t2),则继续按照原来的扰动方式,否则按照相反的方向扰动。系统最终的工作点在MPP处小幅振荡,会有一定的能量损耗。但是在如下情况下系统会出现一些误判,虽然最终也能追踪到MPP,但损耗和振荡将加大,如图3所示。
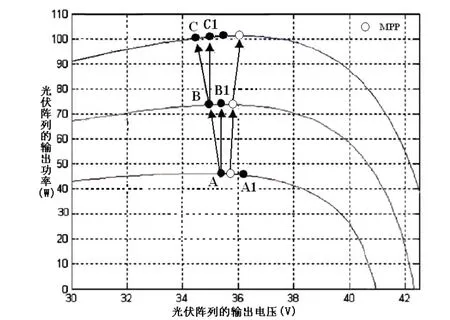
图3 光伏阵列的输出电压与光伏系统的输出功率之间关系
假设系统稳定时在A1和A之间振荡,当前工作点在A点,其电压为VA,那么系统到达A点时所应施加的扰动电压增量△V应小于0,假设此时光照突然加强了,工作点直接从曲线1跳到曲线2上,那么对应的工作点由A点跳到B1点,显然B1点的功率PB1大于PA,那么系统仍要根据原来的扰动方式继续施加同方向的电压增量△V,使得光伏阵列的输出电压继续变小到B点,同样,如果光照再继续加强,那么经过再次扰动后,就会到达如图所示的C点,离MPP更远了,虽然系统最终会调整至MPP附近,但这样增加了系统的响应时间,造成系统的不稳定,也消耗了更多的能量。此外,当外界因素温度或者日照发生突变时,控制系统可能会出现误判,造成系统的大幅振荡和不稳定。
3 MPPT控制算法仿真设计
MPPT控制算法仿真总体设计如图4所示,利用已经建立的光伏阵列计算机仿真模型以及实测光照强度数据,根据MPPT控制算法的原理进行计算机仿真,建立MPPT控制算法仿真界面如图5所示。在保持温度为25 ℃不变的情况下,根据选择的已采集到的某一天光强数据和输入的算法参数进行计算仿真,计算所选算法的跟踪效率,绘制跟踪曲线。

图4 MPPT控制算法仿真总体设计

图5 MPPT控制算法仿真界面
4 结束语
根据MPPT控制算法,对MPPT控制算法和基本原理进行了阐述,在实际应用中应根据不同的要求和场合来选择相应的MPPT算法。随着未来光伏产业的不断发展,MPPT控制器将朝着结构简单轻便、低功耗、可靠性高、抗干扰强、适应性广的方向发展。
1 崔岩、蔡炳煌、李大勇等.太阳能光伏系统MPPT控制算法的对比研究[J].太阳能学报,2006(6):535~539
2 赵剑飞、曹秉刚、廉龙云等.太阳能电动车最大功率点跟踪器的设计[J].系统仿真学报,2003(5):737~741
3 张超、何湘宁.非对称模糊PID控制在光伏发电MPPT中的应用[J].电工技术学报,2005(10):71~75
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
选煤技术(2022年2期)2022-06-06
现代电力(2022年2期)2022-05-23
太阳能(2022年2期)2022-03-07
山东建筑大学学报(2021年6期)2021-12-23
北京航空航天大学学报(2021年7期)2021-08-13
湖北工业大学学报(2021年2期)2021-04-28
北京航空航天大学学报(2017年1期)2017-11-24
汽车文摘(2016年11期)2016-12-08
科技视界(2016年18期)2016-11-03
