用气体摆的原理制作平衡姿态传感器
2011-01-26 05:49:00史朦朦张海波王艳荣刘柯林
物理实验 2011年9期
史朦朦,张海波,李 路,王艳荣,刘柯林,于 瑶
(三江学院a.电子信息工程学院;b.物理教研室,江苏 南京210012)
1 实验原理
在重力场内,密度大的气体会下沉,密度小的气体要上浮,形成对流.在一根柱状的密闭腔内,沿轴线方向对称的位置设置2根平行的热敏丝r1,r2,在该结构中热敏丝既做热丝,又做敏感元件,如图1所示.通电时,热敏丝加热密闭腔内的气体,近热源端的气体由于密度减小而上升,而在密闭腔的边缘处,气体的密度大,在重力的作用下,气体向下运动,在密闭腔中垂直向上的方向,形成气体的自然对流,气体的运动具有摆的特性.

图1 柱状密闭腔放置2根热敏丝
无论密闭腔是水平放置,还是倾斜放置,密闭腔中自然对流气流的方向总是垂直向上,如图2所示.这种现象与一端固定的固体摆锤始终保持垂直向下而不随姿态改变的现象类似.
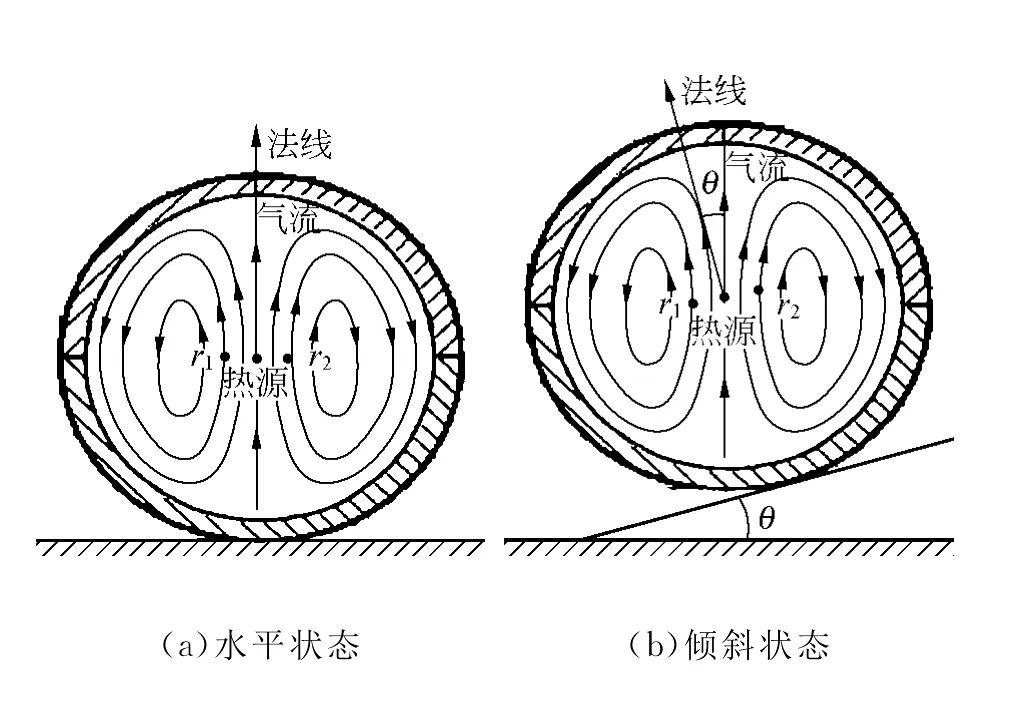
图2 密闭腔在不同状态下自然对流方向总是垂直向上
气体的密度差是产生气体摆的重要原因,而气体密度差又是由于密闭腔内的温度差引起的.给热敏丝r1和r2通电加热,将密闭腔放置在室温中,保持它的边界条件不变,几分钟后,腔内就会形成比较稳定的温度梯度.如果将2个与轴心对称的热源等效成位于轴心处1个热源,那么密闭腔内的温度场的分布如图3所示.r1,r2处在不同的等温线上,阻值大小会发生变化.
将2根热敏丝r1和r2构成惠斯通电桥的2个可变臂,取另外2个相等的电阻R组成惠斯通电桥的固定臂,当热敏丝r1和r2平置时,上升气流穿过热丝的速度相同,气体流动对热丝阻值的影响相同,r1和r2感受到的温度相同,故r1=r2,U1=U2,电桥平衡时输出电压为0;当密闭腔倾斜,使2根热敏丝之间有倾角θ时,气体的流动对热敏丝的影响不同,r1≠r2,U1≠U2,从电桥输出的差分信号为Uo.实验证明在一定的倾角范围内,Uo大小与θ呈线性关系,即Uo=Kθ,式中K是比例系数.平衡姿态传感器电路原理图见图4.
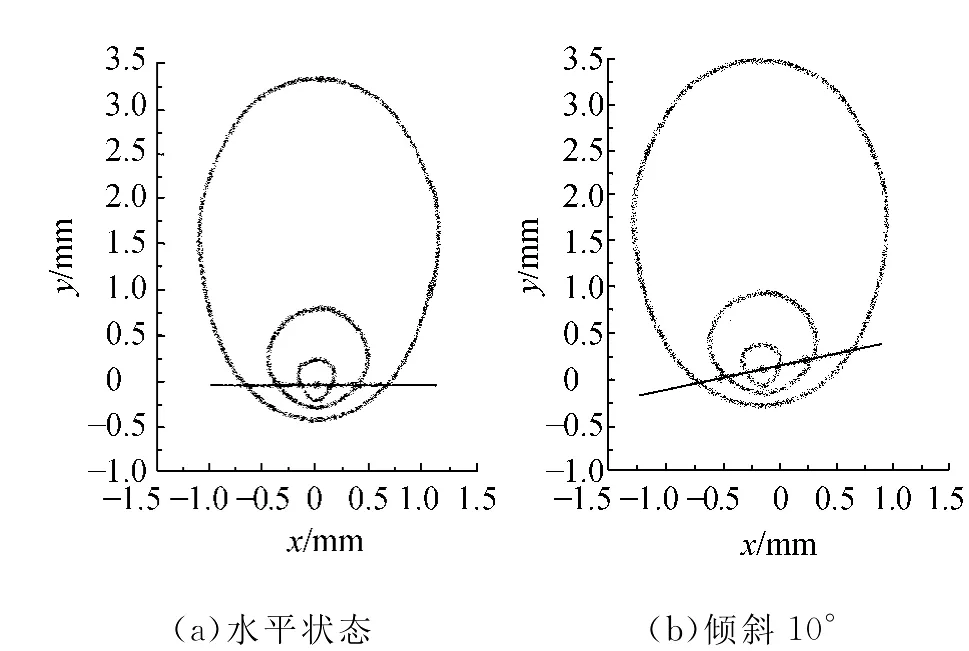
图3 不同状态下密闭腔内温度场的分布
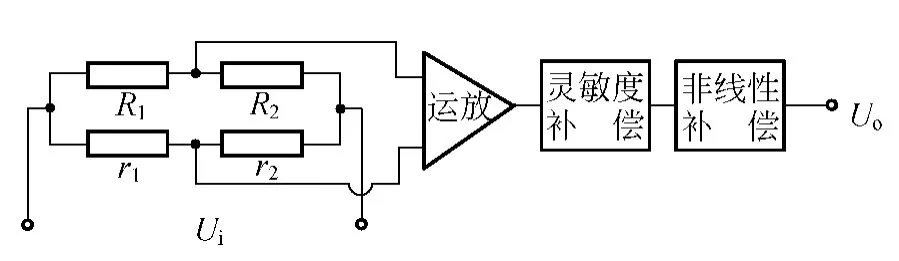
图4 传感器电路原理图
2 实验方法
从原理可看出,选择1对合适的热敏丝是关键.热敏丝既要发热好还要对温度很敏感.实验时以电阻率和温度系数等物理参量作为选材参考,如:钨丝具有很好的发热性能,但实验发现它对热的敏感很差;镍铬材料热敏感好而发热效果不佳……由于可以实验的材料有限,象铂金丝这样昂贵材料难于得到.在现有的材料中经过多次实验后发现用于杨氏模量测量的钢丝既具有良好的发热性能,又有热敏功能,且价格低廉.
密闭腔开始选用的是玻璃管,由于玻璃管导热不好,边界积蓄的热量使温度缓慢上升,腔内的温度梯度变得很不稳定,给测量带来很多麻烦.后来改用金属圆管做密闭腔,因为金属导热好,可以把腔内的热量传出来,使得边界条件接近稳定.改进后的密闭腔是直径为2.992 cm,壁厚为0.756 cm,长为15.950 cm 的黄铜管,1对直径为0.20 mm的钢丝相距为7.0 mm,平行设置在管内,铜管两端用橡胶塞密封后接入惠斯通电桥中.
为了提高热效率,电桥中取R≫r,让流经热敏丝的电流占流经电桥总电流的95%以上.由于惠斯通电桥的4个臂电阻不能完全相同,在桥路的固定臂中间加了电位器Rw,当2根热敏丝平置时,协助电桥调平衡,如图5所示.
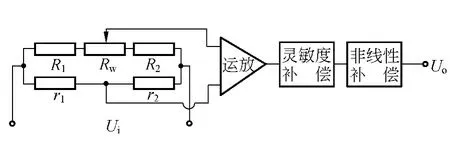
图5 电路原理图
即便如此,要得到电桥平衡时输出为零还是很困难,电桥仍有小的Uo输出.因此实际电桥输出电压与传感器倾斜角度的关系为:Uo=Kθ+ΔU.要读出传感器的倾角还要有读角度的装置,将传感器安置在此装置上,转动的角度由指针在角度盘上指出.
3 数据处理
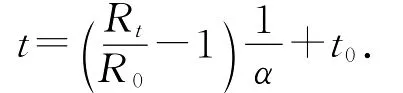
选择直径为0.20 mm的钢丝,在室温t0=17.0℃下,用双臂电桥测出2根热敏丝的电阻R0=4.008Ω,钢丝的温度系数α=60×10-4℃-1,通电后钢丝的阻值随温度发生变化为Rt,Rt与温度的关系是Rt=R0(1+αt),加不同的电流I、电压Ui,可得Rt=I/Ui,由此可求出钢丝的温度:
多次测量并计算相关数据见表1.
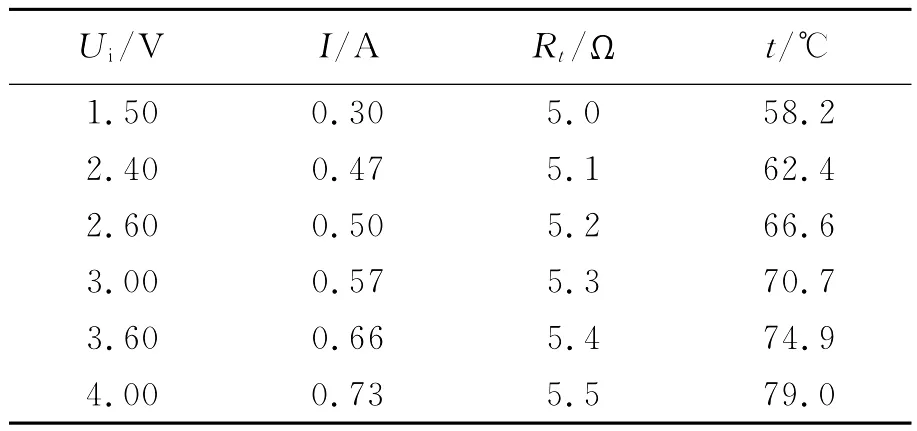
表1 测量数据
电流的大小既要满足发热需求,使传感器有良好的灵敏度,又要尽量减少功耗,实验中经过多次测量比较最终取I=0.60 A.气体摆内热丝的温度随电压变化关系如图6所示.
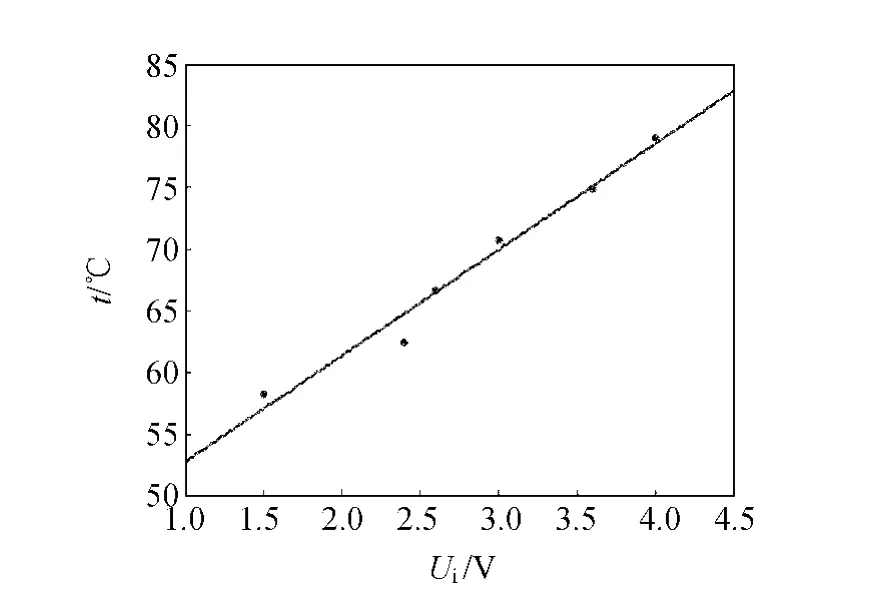
图6 温度随电压变化关系
电桥输出电压和传感器的倾斜角度Uo-θ之间的关系,如表2所示.用表2数据作ΔU-θ图见图7.
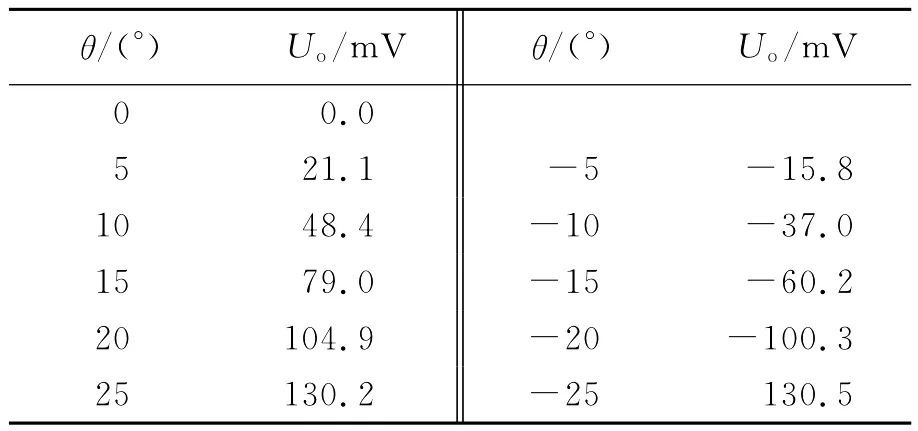
表2 电桥输出电压与传感器倾斜角的关系
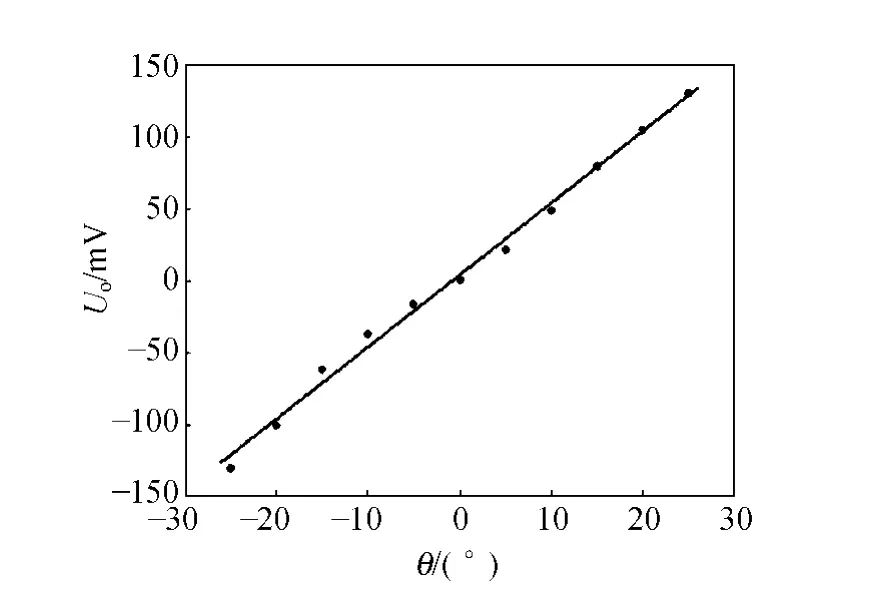
图7 电桥输出电压和倾角的关系图
由图7可以求出斜率K=5.2 m V/°,电桥平衡时有不为零的电压,调零后ΔU=0,电桥输出电压与传感器倾斜角度的关系为

4 结果分析
通过多次实验及数据分析发现气体摆平衡姿态传感器的优点如下:
1)用气体摆原理制成的平衡姿态传感器由于气体质量小、惯性小,所以抗振性能好、反应快;用气体作为介质比固体和液体都容易快速适应姿态及环境的变化.
2)钢丝完全可以胜任热敏感和发热2个功能,价格低廉,牢固,稳定性好.
3)气体摆平衡姿态传感器用途广,可以用于机器人运动时倾角的测控;可以用于海上平台或舰船的动态测控系统等.
现在的传感器制作比较粗糙,所用材料选择余地有限,还存在以下不足:
1)流经钢丝的电流还过大,由于电流的大小与钢丝的直径有关,实验室初次选择0.60 mm的钢丝,电流为3.0 A;现在选择0.20 mm钢丝,电流降到了0.60 A,如果能有直径为0.1 mm或更小的钢丝,电流有望继续减小.此外,电流的大小还与密闭腔的外径有关,如能减小外径,增加内部温度梯度,那么电流也可减小.
2)目前传感器的尺寸还大了些.
5 结束语
用气体摆原理研制平衡姿态传感器是学生在教师帮助与指导下第一次参加带有科研性质的制作,虽然实验室条件有限,可选择的材料少,但却受到不少启迪:如何把学到的知识用于实验,用于研发,不懂的问题如何解决,等等.现在手工制作的传感器样品还很粗糙,有待继续改进.
[1] 张福学.密闭腔内气流的摆特性[J].中国工程科学,2002,4(8):51-53.
[2] 吴思诚.近代物理实验[M].北京:高等教育出版社,2005.
[3] 朴林华,张伟,张福学.密闭腔中自然对流气体摆特性的有限元分析[J].电子元件与材料,2003,22(12):16-18,21.
[4] 张瑞斌,秦颖,李敬安,等.用于指导交流电桥实验调零的矢量数学模型[J].物理实验,2010,30(6):42-45.
猜你喜欢
橡塑技术与装备(2022年1期)2022-01-20 08:41:00
学生天地(2020年3期)2020-08-25 09:04:16
轮胎工业(2020年4期)2020-03-01 04:47:54
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
创新创业理论研究与实践(2018年22期)2018-03-28 08:38:14
橡胶工业(2015年5期)2015-08-29 06:47:28
电测与仪表(2014年16期)2014-04-22 05:20:02
河南科技(2014年11期)2014-02-27 14:09:47
物理与工程(2011年6期)2011-03-25 10:04:08