一种基于TMS320F2812的五相步进电机细分驱动方案
2011-01-18 03:51黄勇
湖北民族大学学报(自然科学版) 2011年1期
黄 勇
(湖北民族学院 信息工程学院,湖北 恩施 445000)
步进电机是纯粹的数字控制执行部件.它将电脉冲信号转换成角位移,即给一个脉冲信号,步进电机就会转动一个角度,因此非常适合于单片机控制[1].步进电机的角位移与输入脉冲成正比,没有累积误差,具有良好的跟随性.由于步进电机的优异性能,在工业控制中得到了广泛的应用.但步进电机大多数情况下采用开环控制,存在低频振荡、分辨率不高、有丢步和过冲的现象,不满足高紧密应用的场合.为了提高电机的运行平稳性和分辨率,解决单片机控制步进电机中存在的一些问题[2],针对高性能的五相混合式步进电机,本文提出了一种步进电机细分驱动方案,采用TI公司推出的高性能DSP处理器TMS320F2812对步进电机进行细分驱动控制.
1 五相步进电机细分驱动原理
步进电机细分驱动控制,从根本上讲就是对电机绕组中电流的控制,使电机内部的合成磁场为均匀的圆形旋转磁场,以实现步距角的细分.五相步进电机作为步进电机的产品之一,在各个领域得到了广泛应用,针对五相步进电机,通过改变电机内部绕组中的电流,使合成磁场矢量的幅值恒定、合成磁场的角度变化均匀.本方案中采用的五相步进电机为按A-B-C-D-E首尾串联的五边形构成,步距角为0.72°.
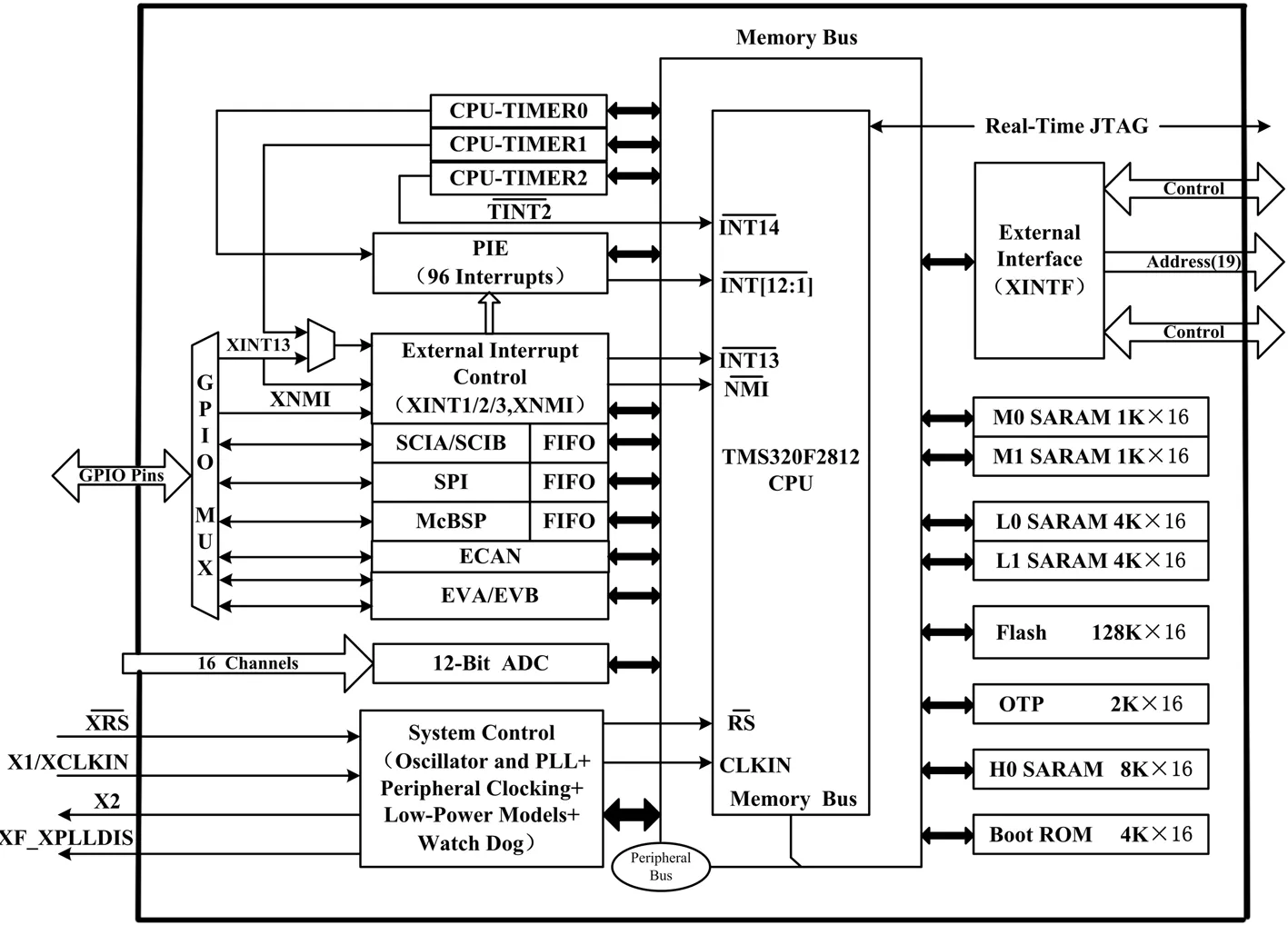
图1 TMS320F2812芯片内部结构框图Fig.1 Internal structure diagram of TMS320F2812
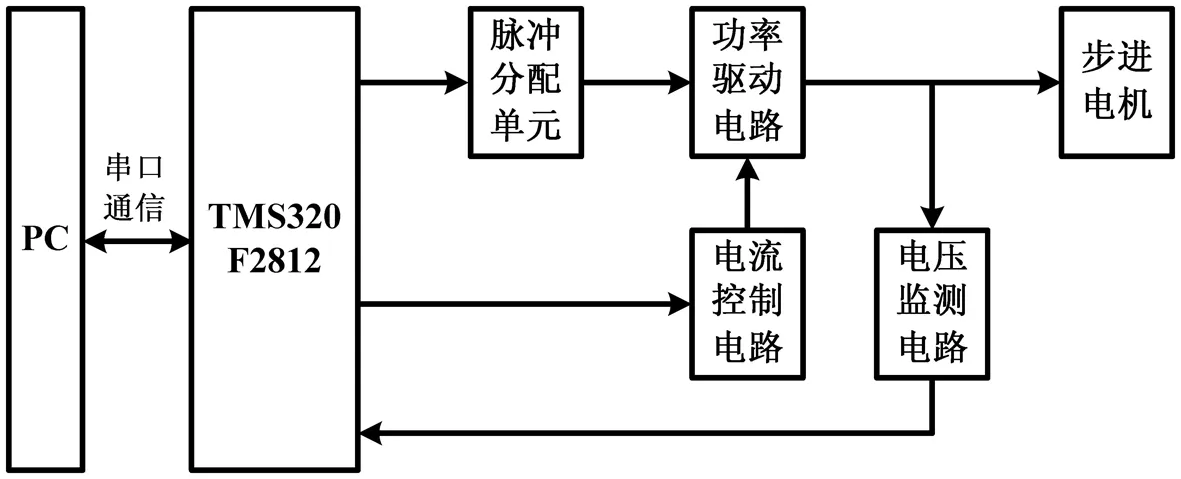
图2 细分驱动系统硬件结构框图Fig.2 Hardware structure diagram of subdivided driving system
2 TMS320F2812芯片
TMS320F2812芯片是美国TI公司于2001年推出的功能较强大的32位定点DSP芯片,该芯片既具有数字信号处理能力、又具有强大的事件管理能力和嵌入式控制功能,特别适合于有大批量数据处理的测控现场,如工业自动化控制、电力电子技术应用、智能化仪器仪表以及电动机控制系统等.在TMS320F2812芯片内部集成了128K×16的FLASH存储器,16通道的高性能12位模数转换模块,以及提供良好控制功能的两个事件管理器模块.其内部结构如图1所示[3].
3 细分驱动系统硬件设计
方案提出的五相步进电机细分驱动设计主要由串口通信电路单元、脉冲分配电路单元、功率驱动电路单元、电流控制与电压检测电路单元等四部分构成.基于TMS320F2812的步进电机细分驱动系统框图如图2所示.
3.1 脉冲分配电路单元
方案采用PMM8714为脉冲分配器,该芯片内部由可逆环行计数器、时钟选通、激励方式控制与判断等主要部分组成.PMM8714适用于五相步进电机的控制,根据实际需要,可以选择六种不同的激励方式.
3.2 功率驱动电路单元
方案通过PMM5303将脉冲分配器PMM8714输出来的弱信号转换为强信号.PMM5303是一个用于驱动五相步进电机的专用模组,其内部集成有H桥的功率管,使用起来非常方便.
3.3 电流控制电路单元
该电路单元主要控制集成功率放大器PMM5303的输出电流大小.主要是通过DSP处理器的IO口控制一片D/A转换器,该转换器的输出端接PMM5303的第1个引脚,当该引脚的电压发生变化时,可使集成功率放大器PMM5303的输出总电流在0~4 A之间变化.
3.4 DSP串口通信电路单元
该电路单元主要完成PC机向DSP处理器发送控制信号.通过PC机发送的指令改变DSP处理器输出的控制信号,以改变步进电机的运动方向、运行速度和细分数,同时在上位机的程序界面显示步进电机的运行状态.如果该细分驱动系统脱离PC机,则可以用键盘显示电路来替代.
4 仿真分析
忽略一些次要的因素,假设输入五相步进电机的各相电流如公式(1)所示:
(1)
公式(1)中,k′为五相步进电机细分后运行拍数,k为脉冲序数.五相电机各相磁动势如公式(2)所示:
(2)
公式(2)中,Fa是磁动势矢量,由于五相步进电机五相在空间是均与分布的,其轴线间夹角是72°,由公式(1)和(2)可以推导出五相步进电机五相绕组在电机气隙中合成的磁动势如公式(3)所示:

(3)
通过公式(3)可以得出,若五相步进电机五相通以连续的对称正弦电流,合成磁动势将保持幅度不变、绕圆周旋转,从而实现细分.
按照上述思想,在Matlab/Simulink环境下进行了仿真分析[4-5],对于原有步距角为0.72°的五相步进电机,把进行了26和27量化后的电流采样值通入到电机模型中,运行时间分别是0.7 s和1.4 s,五相步进电机转子转动0.72°的电流波形以及对应的转子所在位置,分别如图3、图4和图5、图6所示.
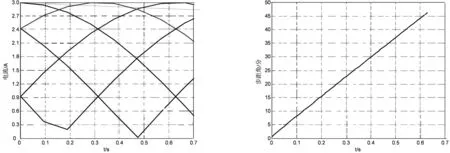
图3 64细分电流 图4 对应64细分电流电机转子位置 Fig.3 64 subdivision current Fig.4 Motor rotor position in 64 subdivision current conditions
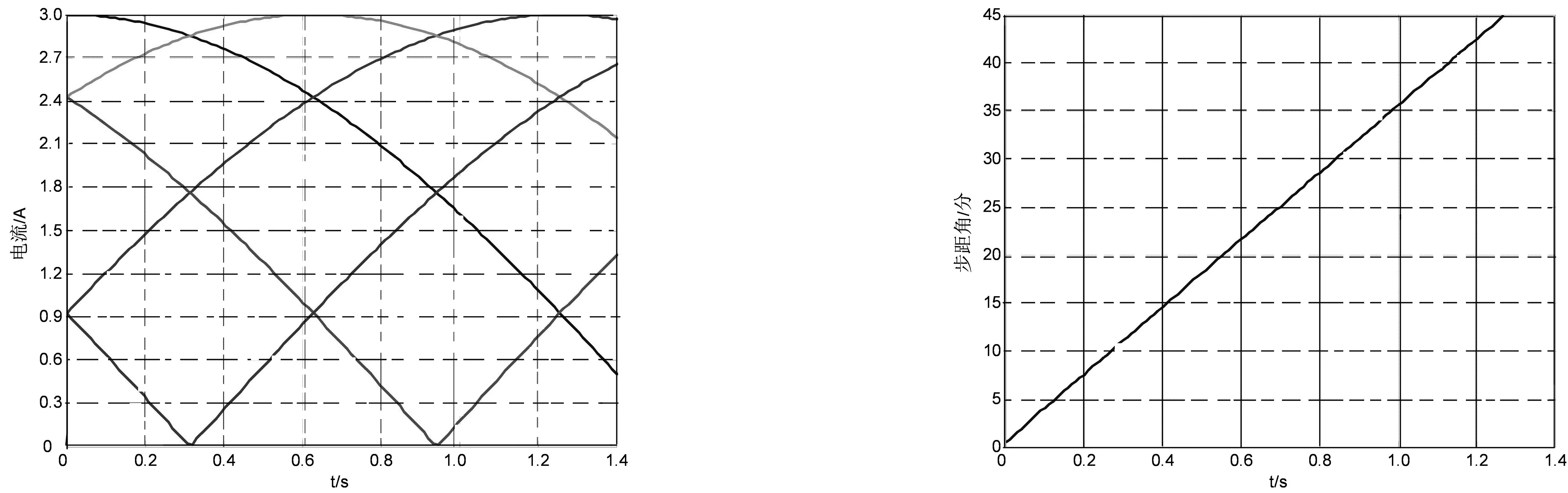
图5 128细分电流 图6 对应128细分电流电机转子位置 Fig.5 64 subdivision current Fig.6 Motor rotor position in 64 subdivision current conditions
对以上仿真结果分析可以得到:细分数越大,则位置精度越高,输入的电流也越接近正余弦波形; a、b、c、d、e相的电流改变一次,五相步进电机就步进一个细分步距角;细分步距角与细分数成近似的线性关系.
5 系统软件设计
软件是细分驱动系统方案中一个非常重要的组成部分,主要包括主程序、细分驱动程序、键盘显示程序和监测程序4个部分.
主程序控制程序流程,主要完成程序初始化、中断设置及相关子程序的调用[6],其流程图如图7所示;细分驱动程序以仿真的结果为依据,细分电流的输出通过查表的方式确定,其流程图如图8所示;键盘显示程序主要包括细分数的选择按键处理和电机运行步数的显示;监测程序主要用来检测电机绕组上的电压,防止高压烧坏电机.
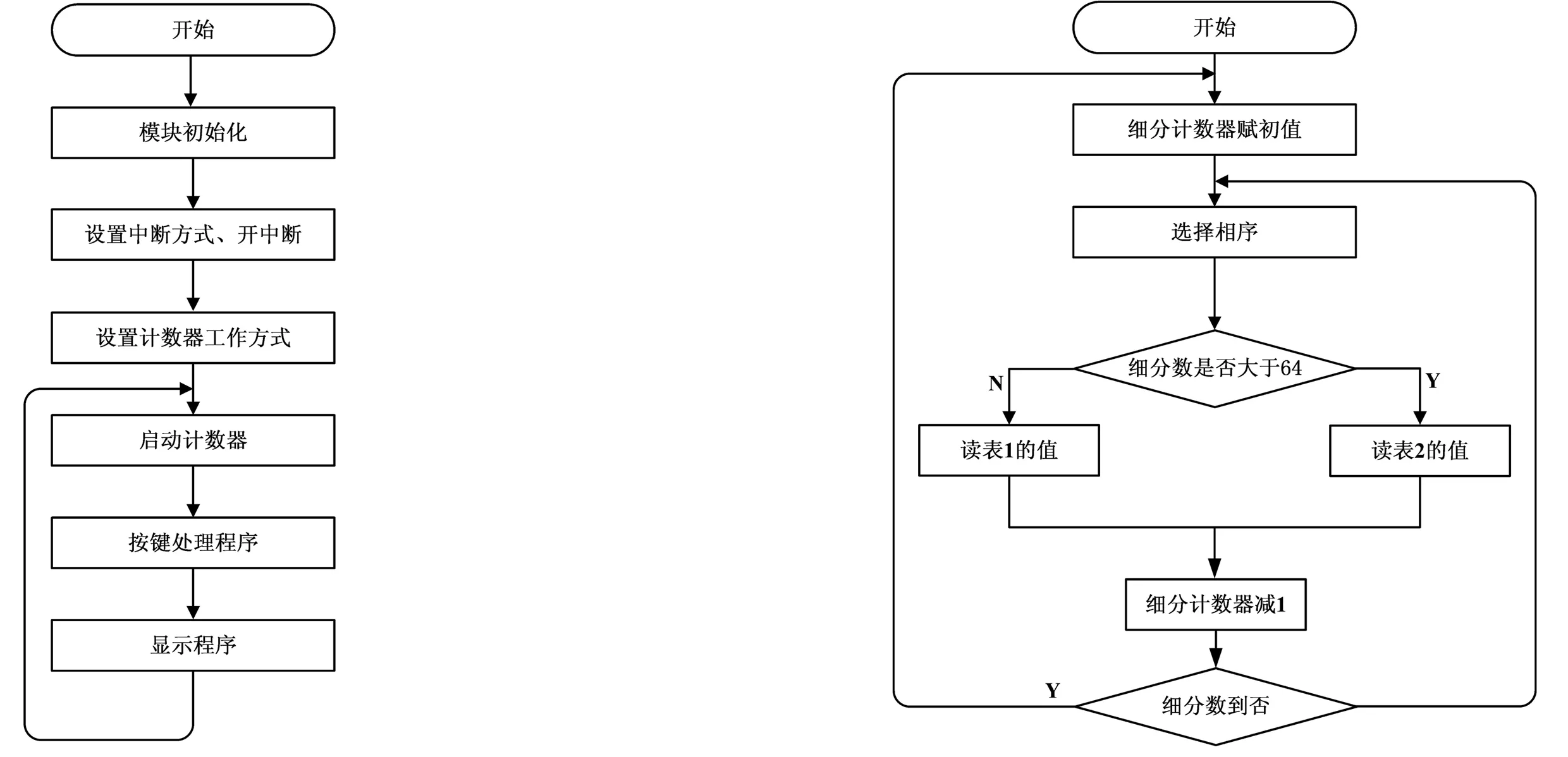
图7 主程序流程图 图8 细分驱动程序流程图Fig.7 Main program flow chart Fig.8 Subdivision driver program flow chart
6 测试结果及分析
对于本方案的五相步进电机细分驱动系统,从测试其系统静态误差入手,分析了其性能.采用的五相步进电机为5线、静力矩为4.2 N.m、相电流2.8 A、相电阻0.58 Ω.测试过程为:用五相步进电机带动一测试台,当电机带动测试台运转时,通过24面棱体和自准直仪读数,在64细分和128细分情况下的测试结果如图9、图10所示.通过分析可以发现:系统的静态误差≤10″,没有发生丢步现象;重复性较好,可以运用到对精度要求比较高的环境中.
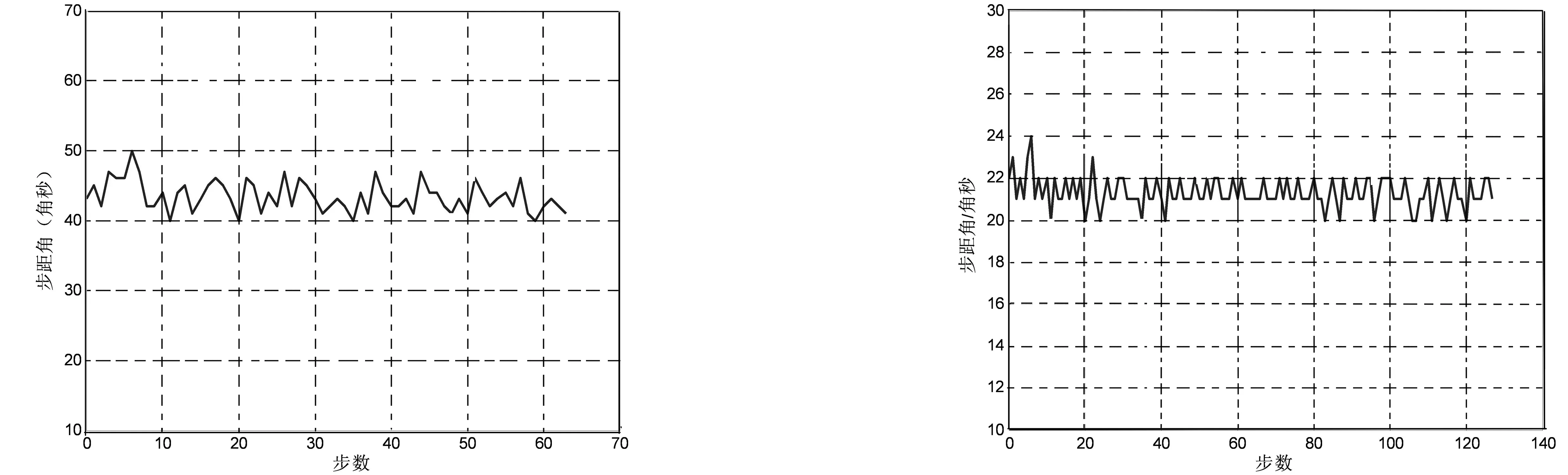
图9 64细分测试结果 图10 128细分测试结果Fig.9 Test results in 64 subdivision current conditions Fig.10 Test results in 64 subdivision current conditions
7 结语
采用TI公司的DSP处理器TMS320F2812实现的步进电机细分驱动方案,实现了对五相步进电机的64和128细分,使步进电机的步距角达到了20″,解决了步距角大的问题,提高了整个系统的平稳性、降低了电机的运行噪声,进一步扩大了步进电机的应用范围.该方案具有较高的工程应用价值.
[1] 王宗培.步进电动机的发展及建议[J].微电机,2004,37(4):47-49.
[2] 刁红泉,胡伟雄,颜钢锋.基于单片机的改进型五相混合式步进电机驱动器设计[J].工程设计学报,2004,11(1):19-22.
[3] 姚晓通,王紫婷.DSP技术实践教程:TMS320F2812设计与实验[M].北京:中国铁道出版社,2009:41-76.
[4] 赵纪倩,贾要勤.基于Matlab/Simulink的DSP控制代码开发技术[J].电力电子技术,2010,44(12):59-61.
[5] 朱文渝,姚娅川.基于Matlab的异步电动机间接矢量控制系统研究[J].磁性材料及器件,2010,41(5):57-69.
[6] 郭建广,贾进滢,黄建刚,等.基于无线传感器网络的环境温度监测系统设计[J].湖北民族学院学报:自然科学版,2010,28(3):353-356.
猜你喜欢
环球时报(2022-09-29)2022-09-29
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
华人时刊(2020年23期)2020-04-13
铁道通信信号(2019年4期)2019-10-10
通信电源技术(2016年1期)2016-04-16
专用汽车(2016年9期)2016-03-01
湖北工业大学学报(2016年5期)2016-02-27
专用汽车(2015年2期)2015-03-01
中国记者(2014年1期)2014-03-01