深空探测自动采样机构的特点及应用
2011-01-08 08:31:20刘志全庞彧李新立
航天器工程 2011年3期
刘志全 庞彧 李新立
(北京空间飞行器总体设计部,北京100094)
1 引言
为探索空间资源分布、了解宇宙发展演化历史,人类已多次开展了行星表面土壤和岩石样品的采样和分析。利用采样机构获取样品并对样品进行分析研究,是深空探测中的重要任务和关键技术。国际空间组织、研究机构对深空探测采样返回技术投入了大量精力,并已取得了很多有价值的成果。随着我国月球探测工程的深入发展,我国未来将要实现月球土壤样品的自动采集与返回[1-2]。本文在对国外深空探测自动采样机构应用特点及发展趋势分析的基础上,结合我国探月工程实际需求,提出月面自动采样机构发展及应用的建议,从而为我国探月工程中的月面自动采样提供技术参考。
2 深空探测自动采样机构的组成及特点
半个世纪以来,NASA 多次成功实现了对月球、火星的采样探测;前苏联曾成功完成了月球、金星采样探测;ESA 对火星的采样探测未能成功,对彗星的采样探测器正在轨道运行;日本宇宙航空研究开发机构成功完成了对小行星的采样探测。在这些采样活动中,除阿波罗(A pollo)月球探测器采取有人采样方式外[3-4],其余都采用了无人操作的自动采样机构,主要包括:挖取式自动采样机构、钳取式自动采样机构、研磨式自动采样机构、钻取式自动采样机构及其它新型自动采样机构等。
2.1 挖取式自动采样机构
挖取式自动采样机构通常是由类似铲形的采样机构以挖掘的方式获取样品,该类机构在NASA 火星探测任务中的海盗号(Viking)着陆器、凤凰号(Phoenix)探测器和火星极区着陆器上都得到了应用。
1975年发射的海盗号火星着陆器,采用机械臂末端安装挖取式自动采样机构进行采样[5]。采样机构主要由铲体、盖子、螺线管振荡器、筛网、反向铲、驱动电机等部分组成,如图1 所示。采样机构前端是带有盖子的铲形容器,内置驱动电机可驱动铲体绕轴向180°旋转。铲体顶端装有螺线管振荡器和孔径2mm 的金属筛网,用来筛选采集的样品。铲体底部装有反向铲。在机械臂向后拖动时,反向铲可以将坚实的火星土壤翻松,以便铲体能以较小的铲入力完成采样。
为了收集火星土,采样机构的盖子首先是打开的,随后机械臂带动铲体插入火星土壤,一旦铲体内充满样品,则触动指示开关给出信号,使盖子合上完成样品的采集。铲体绕轴向180°翻转,螺线管振荡器驱动筛网振动,使直径小于2mm 的颗粒掉入分析仪器的收集器内。剩余颗粒度较大样品可由机械臂送到其它的分析仪器内。海盗号探测器所用挖取式自动采样机构重11.3kg, 功率30W, 外形尺寸614.8mm×233.7mm ×342.9mm,最大采样深度约200mm ,最大挖取力为133N。
挖取式自动采样机构的主要优点是结构简单、可靠性高,适用于浅表层松软土壤及小型岩石采样。采样铲通常安装于机械臂末端,可以灵活选择采样地点,规避障碍,还可进行重复采样动作,因此获取的样品量较大。挖取式自动采样机构通常还复合有其它功能机构来完成特定任务,如海盗号着陆器上的采样机构复合有分离筛选机构、凤凰号探测器上的采样机构复合有破冰钻等。挖取式自动采样机构的缺点是:获取的样品无法保留其层理特性,且不能对深层月壤及较大的月岩进行采样,因此所采样品信息量有限。
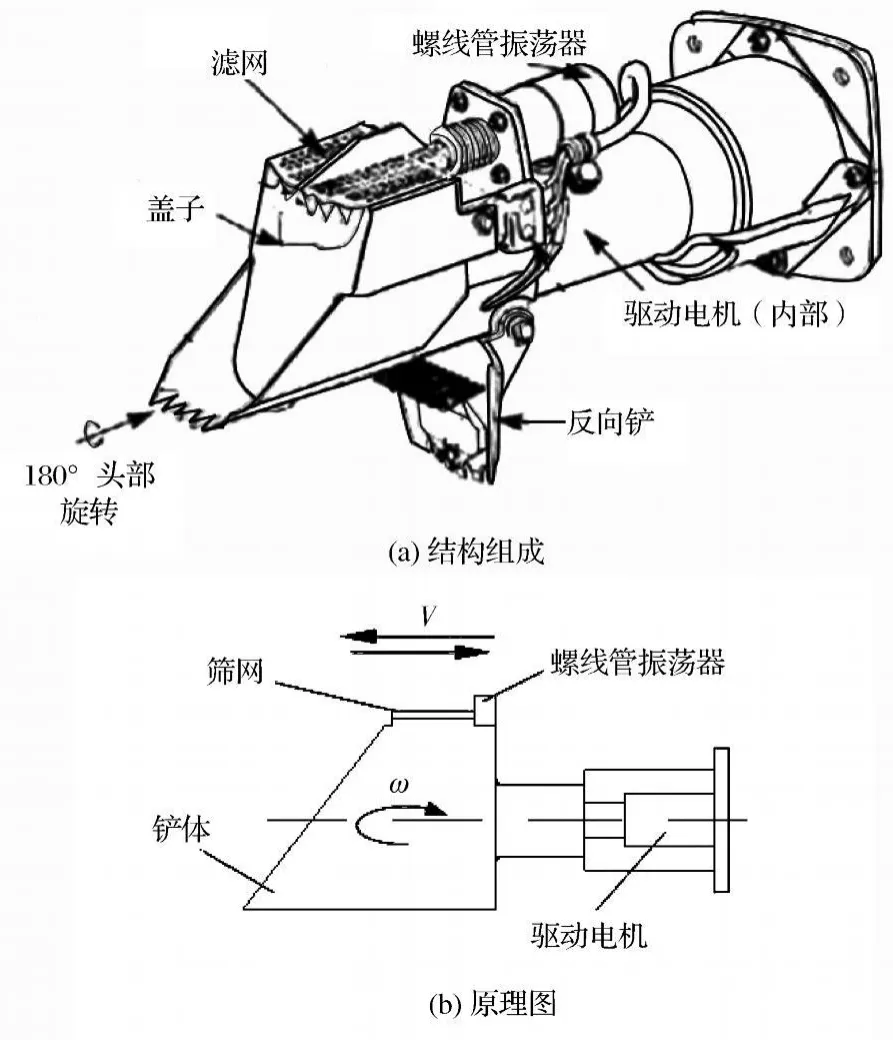
图1 海盗号火星着陆器上挖取式自动采样机构Fig.1 Automatic scoop sam pling mechanism on Viking Lander
2.2 钳取式自动采样机构
1995-1997年由香港理工大学研制的微型末端感应器(M icro End Effector, M EE)钳取式自动采样机构,应用于ESA 和意大利空间中心(ASI)合作的“行星表面小样本采样工具”研制项目中[6]。该机构拟用于从火星或彗星表面采集微量土壤样品。
M EE 钳取式自动采样机构安装于机械臂末端的旋转支座上,主要由钳口、钳臂、丝杠、螺母及驱动电机组成(见图2)。钳口结构类似一对钳子,每个钳口顶端有尖锐齿,两钳口闭合后形成钻头状。钳臂是连接钳口和螺母的一系列连杆,每个钳口两侧各安装一对钳臂。
采样时,机械臂末端的旋转支座先固定不动,MEE 电机驱动丝杠正向旋转,带动螺母向上平移,同时带动钳臂运动使钳口闭合形成钻头形状。随后机械臂末端旋转支座转动带动采样机构形成的微型钻头钻入土壤。土壤松动后,机械臂抬起,旋转支座停止转动。M EE 电机驱动丝杠反向旋转,带动螺母向下移动使钳口张开。在摄像机的监控下,调整机械臂姿态。电机的正反向驱动实现了钳口的开合。这样,采样机构就可夹住和采集小块的目标岩石和土壤样品。M EE 质量1.76kg,功率5W,采样能力约0.2cm3,可以钻进深度约1~2cm。
钳取式自动采样机构结构简单、可靠性高,可实现采集样品的有效传递,但受到采样能力及适用范围限制,钳取式自动采样机构应用较少。在ESA 的小猎犬2 号(Beagle-2)火星探测器中,虽然采用了类似钳取式与研磨式复合的采样机构,但由于此任务的失败,该采样机构也未能得到真正的应用。
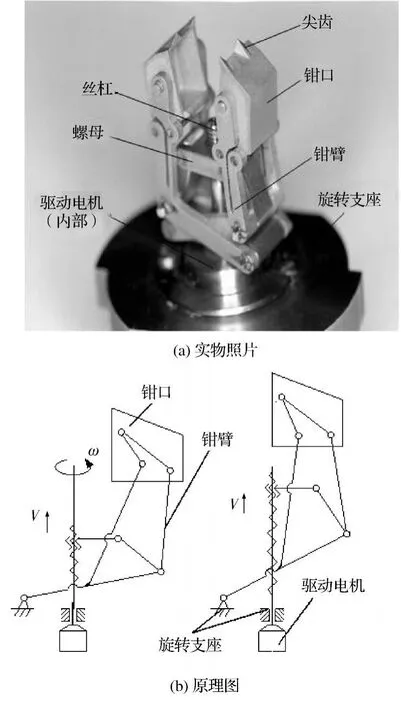
图2 MEE 钳取式自动采样机构Fig.2 Automatic pincer sam pling mechanism on M EE
2.3 研磨式自动采样机构
2003年NASA 研制的“火星巡视探测器”(Mars Exploration Rover , ME R)携带了由英国Honeybee Robotic 公司设计的研磨式自动采样机构, 即岩石研磨工具(Rock Abrasion Tool,RAT)[7],如图3 所示。
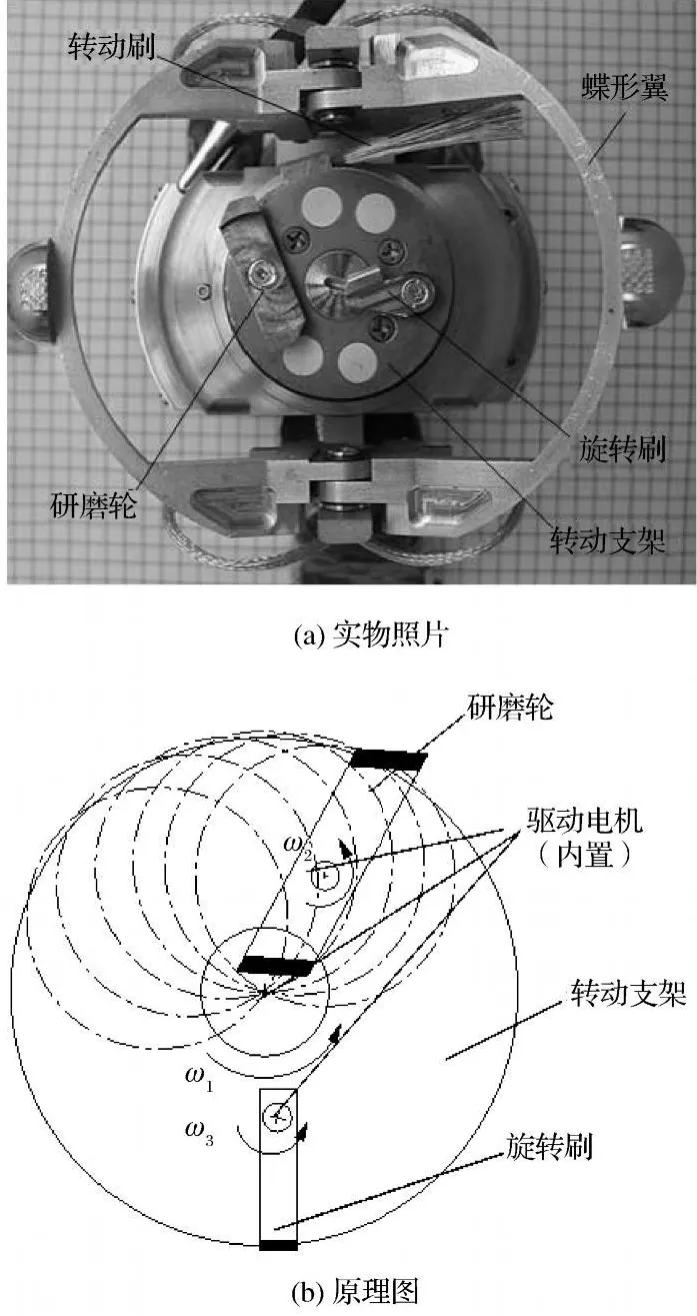
图3 “火星巡视探测器”上的研磨式自动采样机构Fig.3 Automatic abrasion sampling mechanism on MER
RAT 安装于机械臂末端,主要由研磨轮、旋转刷、转动刷、转动支架、蝶形翼和驱动电机组成,重705g,直径70mm,长100mm,功耗11W。研磨轮两端带有金刚石尖齿,通过高速旋转的方式研磨坚硬的岩石。旋转刷和转动刷可及时将研磨产生的岩石屑从工作区域清除。蝶形翼由两个半圆形支架铰接组成,采样机构工作时,蝶形翼在机械臂作用下展开压紧于岩石表面,可起到辅助支撑的作用。
RAT 上的研磨轮和旋转刷由各自的电机驱动,分别以角速度ω2(约30rad/s)和ω3转动。研磨轮、旋转刷和各自电机都安装在转动支架上,而转动支架在其电机驱动下以角速度ω1转动。因此,研磨轮在绕自身轴心以角速度ω2高速自转的同时还绕转动支架中心以角速度ω1 进行公转,最终可以在岩石上研磨出一个直径45mm 、深度为5mm 的圆形区域。同理旋转刷可以及时将研磨产生的碎屑清扫出研磨区域。研磨可以使岩石内部未受空间环境辐射的岩心裸露出来。随后,探测器上机械臂末端携带的科学探测仪器就位于裸露出来的岩心处,开始进行在线分析。
研磨式自动采样机构可以有效去除岩石表层风化、辐照和氧化层,能够对保存了星体信息的岩石内部样品进行采样,从而保证了采样分析的科学性和准确性;但研磨后的样品的层理性被破坏,可达到的采样深度有限,不具有样品收集和保存能力。因此,采用研磨式自动采样机构,只能实现样品的在线分析,而不是取样返回地球后的实验室分析。
2.4 钻取式自动采样机构
钻取式自动采样机构是通过钻孔方式获得星体土壤或岩心样品的机构。1976年, 苏联月球-24(Luna-24)探测器上携带的采样机构就是钻取式自动采样机构[6]。
该钻取式自动采样机构主要由钻机、传送机构、回收机构、钻杆、支撑桁架、导轨等部分组成,如图4所示。整个采样机构通过支撑桁架固连于着陆器侧面。传送机构安装在支撑桁架的中部,可为钻机沿导轨向下运动提供驱动力。传送机构的工作原理类似卷扬机,钢丝绳的一端缠绕在传送机构中的卷筒上,钢丝绳的另一端与钻机相连。当传送机构中的电机驱动卷筒转动来缠绕钢丝绳时,钢丝绳收紧,对钻机施加了沿导轨向下的作用力。钻机安装于支撑桁架的导轨上,在传送机构钢丝绳的作用下可沿着导轨运动。钻机自带的电机驱动钻杆绕其轴线做回转运动。钻机和传送机构同时工作时,钻杆在周向回转切削力和轴向加载力的共同作用下钻入月壤。钻杆横截面为双层同心圆结构,其内层钻杆的内壁上装有专门的柔性取样袋,如图5 所示。随着钻探深度增大,月壤逐渐进入内层钻杆的空腔内,柱形月壤被柔性取样袋收集其中。柔性取样袋顶端封闭并与钢丝绳连接,钢丝绳沿支撑桁架向上缠绕在回收机构的卷筒上。当钻杆钻入指定深度后,柔性取样袋下端收紧封装所取样品。回收机构安装于支撑桁架的顶端,其工作原理与传送机构相似,即利用回收机构的电机驱动回收卷筒缠绕钢丝绳的方法,将内层钻杆中的柔性取样袋提出并缠绕至回收卷筒上。回收机构中装有分离释放装置,将缠绕了柔性取样袋的卷筒弹入返回器内。最后,火工品断开支撑桁架与返回器之间的连接,关闭并密封上升器舱盖,如图6 所示。

图4 Luna-24月球着陆器上的钻取式自动采样机构Fig.4 Automatic drilling sampling mechanism on Luan-24 Lander
Luna-24 着陆器上钻取式自动采样机构的质量为55kg,钻探功率为900W,采样深度达1.6m,实现采集月壤质量170.1g ,样品直径8mm,并在不破坏月壤层理特性的情况下运送回地球。该钻取式自动采样机构在月面工作时间2.2h,钻孔时间1h,总能耗小于35Ah。
钻取式自动采样机构是迄今适用范围最广的一种深空探测自动采样机构,它获取的样品可以是星体土壤也可以是岩心样品;它的采样深度可从几厘米到几米。此外,双层钻杆的结构能够保持所采样品的层理特性。因此用钻取式自动采样机构获得的样品具有更大的科学价值。但是钻取式自动采样机构组成复杂、技术难度大,需要采取一系列有效的可靠性措施来防止卡钻、埋钻等潜在故障。

图5 钻杆剖面图Fig.5 Section of drill stem

图6 Luna-24 着陆器上钻取式自动采样机构工作原理Fig.6 Principle of automatic drilling sampling mechanism on Luan-24 Lander
2.5 其它新型自动采样机构
近年来,随着科技进步以及人类对空间认识的不断深入,其它一些新型采样机构开始陆续被研制出来。2002年, ASI 为NASA 的 火星探测任务(Mars Exploration Mission)开展了深层钻孔(Deep Driller)项目研究,所研制的新型多钻杆组合采样机构,拟用于钻取火星表层2.5m 深的土壤样品,并将样品转移至科学分析仪器或储存容器内[8]。针对传统钻机质量大、体积大、能耗高等缺点,激光钻孔技术、超声波切割技术、仿生学原理在采样机构的设计中得到了应用。2003年, NASA 喷气推进实验室(JPL)研制了超声波钻孔机(USDC),这种钻机的钻头不会转动,而是依靠超声波产生的振动能来驱动其振动切入土壤(或岩石)。钻杆的顶部安装有超声波激励器,该激励器可将超声波信号经由压电物质转化为振动能输出到钻杆上[9]。1997年,美国燃气技术研究所(G TI)和NASA 对激光钻孔技术在火星表面采样的应用进行了可行性试验与研究[10]。2005年,英国萨瑞大学将生物仿生学原理应用到机构设计中,研制了木蜂产卵式自动采样机构[11]。这些新型自动采样机构是将新技术与传统采样原理相结合的产物,还需在未来的应用环境中加以考核。
3 深空探测自动采样机构的发展趋势
基于对国外深空探测采样机构的特点分析,对深空探测采样机构的发展趋势作出如下展望:
(1)具有深层采样能力的钻取式自动采样机构是未来深空探测采样机构的主要发展方向之一。星体表面的土壤和岩石受到空间风化、氧化及紫外辐射等环境的影响较大,从表层样品获取的科学信息十分有限。为了获取更加丰富的、有效的星体信息,需要设法获得原始的、没有被破坏的样本(如,岩石表层内几厘米深的中心部分或垂直深入星体表面超过1m 的土壤样本[12])。挖取式和钳取式自动采样机构仅适用于星体表层松软土壤样品采样;研磨式自动采样机构虽然可以对岩心采样,但不具有样品收集功能,仅适用于在线分析;而钻取式自动采样机构适用范围广泛(采样深度从几厘米到几米均可),无论是岩心样品还是土壤样品均能实现采样。因此钻取式自动采样机构具有极大的发展潜力。随着科技的进步,综合有激光、超声波等技术的钻取式自动采样机构,将会大幅度提高自动采样机构的采样能力和效率。
(2)多功能、低能耗、轻小型自动采样机构是未来远距离(远大于月球探测距离)深空探测采样机构发展的趋势之一。由于空间探测任务的特殊性,采样机构的重量、功耗、构型等指标很大程度上受到探测器系统运载能力的约束。在远距离深空探测任务中,由于很难实现采样返回,因此对采样机构同时具有样品保存、分选、处理等功能的要求就更加突出。挖取式和钳取式自动采样机构以其重量轻、能耗低、可靠性高、兼容性好等优点而更能适应未来发展的需求, 因此多功能复合的小型挖取式和钳取式自动采样机构在远距离深空探测中有着极好的发展前景。
4 我国月面自动采样机构发展的建议
根据我国的月球探测发展规划,我国未来将要实现对月壤样品的无人自动采样与返回,结合月球探测工程的科学目标和探测器系统的功能需求,建议采用钻取式自动采样机构来获取内容更加丰富的月球表层及深层的科学研究信息,以适应我国航天跨越式发展的新形势。建议采用有效的机构可靠性保证措施,来保证钻取式自动采样机构可靠工作,以适应钻取式自动采样机构复杂、工作环境恶劣的特点;在条件允许的情况下,建议适当增加挖取式或复合其它功能的采样机构,以增加获取样品的种类和数量,提高采样任务可靠性。
)
[1]欧阳自远.月球——人类走进深空的前哨站[M].北京:科学出版社,2002
[2]欧阳自远.月球科学概论[M].北京:中国宇航出版社,2005
[3]Bugos G E, Boyd J W.Robotic lunar precursors to Apollo[R].AIAA-2007-6163, 2007
[4]Martin Co.Apollo lunar surface drill(ALSD)final report[R].Baltimore, M C, 1968
[5]Moore H J, Liebes S.Rock pushing and sampling under rocks on Mars[R].NASA-TM-80489, 1978
[6]Matti Anttila.Concept eveluation of Mars drilling and sampling instrument[D].Holand:H elsinki University of Technology,2005
[7]Myrick T.The RAT as a rock physical properties tool[C]// Space Conference Oragnized by AIAA.AIAA-2004-6096, 2004
[8]Re E, M agnani P G, Ylikorpi T, et al.Deeeri drill tool prototype and drilling system development for Mars soil sampling applications[C]//ASTRA2002 Conference,2002
[9]Bar-Cohen Y.Ultrasonic sampler and sensor platform for in-siu astrobiological exploration[R].SPIE Smart Structures and Materials Symposium.CA, 2003:50-55
[10]Brian C G, James G R.Geological investigation of lunar and Martian subsurface using laser drilling system[C]// California :Space 2004 Conference and Exhibit,2004:28-30
[11]Gao Yang, Ellery Alex.Deploylable wood wasp drill for planetary subsurface sampling[R].IEEEAC paper#1591, vision 1, 2005
[12]Ylikorpi T, Visentin G, Suomela J.A robotic rover-Based deep driller for Mars exploration[C]// Proceedings of the 35thAerospace Mechanisms Symposium, Ames Research Center, 2001
猜你喜欢
选煤技术(2022年2期)2022-06-06 09:12:38
石材(2022年1期)2022-05-23 12:48:20
一重技术(2021年5期)2022-01-18 05:41:56
军事文摘(2020年18期)2020-10-27 01:55:10
重型机械(2020年4期)2020-06-29 03:02:58
石材(2020年2期)2020-03-16 13:12:44
航天器工程(2019年4期)2019-11-11 03:41:00
伙伴(2019年12期)2019-01-17 04:38:56
现代冶金(2018年1期)2018-04-08 06:08:12
北京航空航天大学学报(2017年4期)2017-11-23 05:48:48