
基于物探飞行模式的正射影像快速制作
2011-01-05 07:56:58郭大海王建超段延松
自然资源遥感 2011年3期
曹 辉,郭大海,王建超,段延松
基于物探飞行模式的正射影像快速制作
曹 辉1,郭大海2,王建超2,段延松1
(1.武汉大学遥感信息工程学院,武汉 430072;2.中国国土资源航空物探遥感中心,北京 100083)
随着航空物探和摄影测量技术的发展,产生了基于物探和摄影测量技术相结合的飞行方式。为了研究物探飞行模式下正射影像的快速制作方法,针对物探飞行模式的摄影特点,利用摄影中心构建泰森多边形的方法确定最佳影像采样区域和接边线,并根据数字高程模型(DEM)和航空数码影像的外方位元素自动生成测区数字正射影像(DOM),以避免人工的接边处理。同时,针对区域整体DOM数据量大的特点,提出了一种分块、分级的金字塔存储调度策略进行海量影像的存储、显示、漫游及缩放,以突破32位文件系统的限制,实现海量存储和海量正射影像的快速生成。
正射影像;泰森多边形;海量影像
0 引言
在航空物探的实践过程中,摄影测量是获取数字高程模型(DEM)和数字正射影像(DOM)等数据的重要技术手段,也是重力变化、地磁分析等数据的重要来源。传统的航空物探和航空摄影测量是分开进行作业的,即在同一区域进行物探调查时,需分别进行航空物探飞行和航空摄影测量飞行,并分别进行数据处理和数据分析,而造成分开作业的原因,主要是二者飞行模式的不同。物探为低空、随地形飞行模式,即飞行高度随地形的变化而变换;而航空摄影测量为固定飞行高度的匀速飞行模式,其目的是保障摄影像片的均匀分布和有效重叠度,便于摄影测量的后续数据处理。
按物探飞行模式进行的航空摄影测量主要存在摄影比例尺不均匀、影像间重叠度不易控制等问题,因此所获数据难以满足应用要求;而采用传统的摄影测量方法进行物探模式的空中三角测量、DEM的生成以及DOM的制作等工作也不易实现。如果能将两种飞行模式有效结合起来进行作业,不但可以提高航空物探的作业效率,而且还能降低飞行的经济成本。
将两种不同模式结合起来,就是要将航空物探和摄影测量仪器安装在同一架飞机上,在一次飞行中同时获得航空物探和航空摄影测量所需的数据,并利用摄影测量技术和其他辅助技术实现正射影像的快速生成。但对于航空物探飞行模式,由于摄影条件的变换,直接采用传统摄影测量方法无法生成DEM,使得构建传统摄影测量的立体像对工作变得困难,前方交会难以实现,即使可以保障一定的影像重叠度,也容易产生摄影漏洞[1]。
基于以上原因,本文基于物探飞行模式的正射影像生成是通过集成的LiDAR设备来实现的,即在物探飞行时,利用LiDAR的POS系统进行直接定位、激光扫描和航空摄影,从而同时获取地形数据和影像。
1 航空物探模式下正射影像的制作思路
由于物探飞行模式不同于航空摄影,其影像重叠度、摄影比例尺等不能满足摄影测量的要求,通过传统的摄影测量方法,并采用解析空中三角测量恢复每张影像的外方位元素,以及通过密集匹配或者人工绘制等高线的方法获取DEM较为困难,因此,寻求其他获取DEM及航空影像外方位元素的方法,显得非常必要。
航空LiDAR系统能够解决物探飞行模式下DEM的获取问题,是目前新技术中DEM获取速度最快、精度最高的一种方式。而且,一般的LiDAR系统中除了激光扫描系统外,均集成了航空数码像机,以提供激光扫描区域的影像信息。LiDAR是目前获取地形信息最有效的遥感传感器之一,它是一种主动探测传感器,发射的激光脉冲具有穿透性,能够穿透茂密的植被直达地面,不受地面覆盖的影响。在山区或森林区域进行物探飞行时,也能有效获取地形信息。而对影像外方位元素的修正,本文则采用了自动影像匹配方法,量测两两影像的同名像点,并将这些同名像点作为像点观测值,将LiDAR系统中POS数据作为初值进行光束法区域网平差,平差后的POS数据作为原始影像的外方位元素,实现了LiDAR数据与影像的配准。
因此,物探飞行模式下正射影像的制作思路是利用LiDAR提取DEM信息并修正影像的外方位元素,再通过数字微分纠正技术生成满足物探应用的数字影像产品。
1.1 单张影像的正射影像制作基本原理[2,3]
正射影像的制作有间接法和直接法两种。本文采用间接法,即利用DEM和航空影像的外方位元素,通过共线方程(式(1))[2]对航空影像进行逐点数字微分纠正,将不同比例尺的中心投影航空影像纠正成为不同分辨率的数字正射影像。
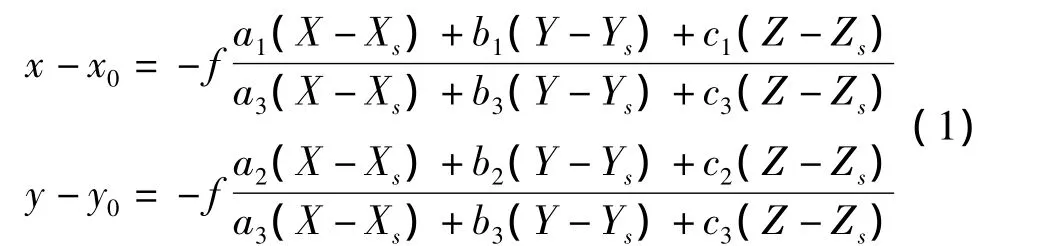
式(1)为物方点、摄影中心和构像点3点共线方程。f为摄影机主距;(x0,y0)为摄影机像主点位置,统称为内方位元素;ai、bi、ci(i=1,2,3)为旋转矩阵的9个方位元素;(Xs,Ys,Zs)为摄影中心点S的摄站坐标;(x,y)为像点坐标;(X,Y,Z)为地面坐标(图1)。
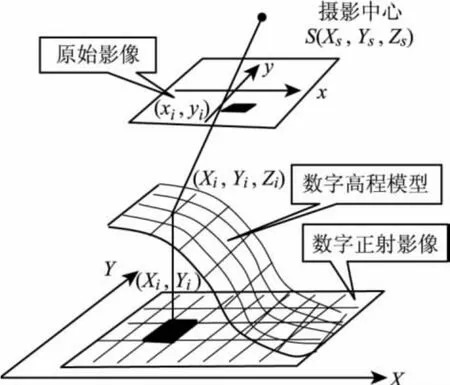
图1 正射纠正原理Fig.1 Theory of ortho rectification
单张影像的具体纠正步骤如下:
步骤(1),根据正射影像的像素坐标和正射影像的地面分辨率(GSD)确定正射影像的地面坐标(Xi,Yi);
步骤(2),利用数字高程模型进行双线性内插,计算地面对应的高程Zi;
步骤(3),根据式(1)计算出正射影像上任一点(Xi,Yi)对应的原始影像(xi,yi)的像点坐标;
步骤(4),根据像点坐标(xi,yi),通过双线性插值计算对应像点的影像灰度值,填充至正射影像对应的像元上。
重复步骤(1)~(4),逐点计算便可以将中心投影的原始影像纠正为具有地理坐标的正射影像。
1.2 大区域整体正射影像的制作
对于大区域整体正射影像的制作,传统的摄影测量方法首先是按单模型或小区域进行分块数字微分纠正,然后再进行正射影像的拼接和接边的。这种方式人工干预量大,编辑结果不直观,多个小区域的接边往往需要进行多次编辑,因而效率低下。
针对物探飞行模式的正射影像快速生成问题,由于DEM的来源不仅限于摄影测量的模型生成方式,还有多种非摄影测量方法,如来源于航空激光扫描(LiDAR),而且DEM为大区域存储,按照框幅式摄影测量,所采用的原始航空影像为相互重叠的影像集。要进行大区域的正射影像生成,关键是如何利用影像的外方位元素确定原始影像对应的正射影像范围,也就是如何将大区域的DEM分割成若干与原始影像对应的小区域,进行整体正射影像制作。
对于整个区域的多张影像,根据以上数字微分纠正理论,每一张影像都要选择离像主点最近的位置采集正射影像,此时可以考虑使用“图论”中的“Voronoi图”来解决最优位置。Voronoi图又叫泰森多边形或Dirichlet图,它是由一组由连接两邻点直线的垂直平分线组成的连续多边形组成。故此只要根据所有影像的主点建立一个“Voronoi图”,再根据“Voronoi图”的覆盖范围选择正射影像的原始数据,就可以制作整体几何关系最优的正射影像。
本文采用按照每张像片摄站中心的平面位置构建泰森多边形[4]。确定每一张影像最佳纠正区域的方法是将原始影像构建的区域分割成以摄站为中心构建的泰森多边形,每个泰森多边形即为一个采样区,如图2所示。
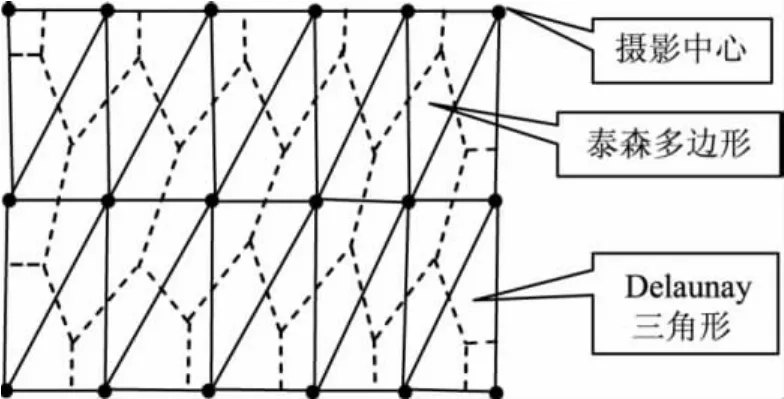
图2 由摄站中心构建的泰森多边形Fig.2 Thiessen polygons generated from a set of project centers
图上圆点表示摄影中心位置,实线是以摄影中心构建的Delaunay三角形的边;虚线所构成的多边形为泰森多边形,也就是最佳正射影像纠正区域。而对于区域边沿影像不能通过构建泰森多边确定的区域,则采用影像的最大纠正区域进行采样纠正。
最佳采样区确定的方法:首先,根据整体DEM和影像摄影中心构建泰森多边形的方法确定每张影像的最佳采样区范围和对应的正射影像范围;然后,将正射影像划分成小块,每块大小可事先按像素大小指定,如32×32、64×64、128×128、256×256等以像素为单位的影像块;最后将各小块划归到各摄站中心形成的泰森多边形中,形成影像索引(图3)。

图3 由泰森多边形确定的影像索引Fig.3 Image index based on Thiessen polygons
图3 中“0”代表此小块采样时利用第一张原始影像;“1”代表此小块采样时利用第二张原始影像,以此类推)。这样就使得每一小块所对应的正射影像与原始影像一一对应,逐块进行数字微分纠正就可实现大区域整体正射影像的制作。
1.3 海量正射影像的存储与显示
基于泰森多边形划分好纠正区域和对应影像、DEM后,根据图3所建立的影像索引,按1.1节描述的数字微分纠正方法分块进行纠正,便得到整个区域的正射影像。但如何存储并能快速地显示整个区域的正射影像,是需要解决的问题。
由于整体正射影像数据量很大(通常会达到几十GB甚至上百GB),按照32位操作系统文件定义规则,文件最大的寻址空间不能超过4 GB,因此大容量的正射影像文件不能简单地储存成为一个影像文件,必须改变文件的直接寻址方式来实现大容量文件的存储。同时,简单的文件存储格式也不利于影像文件的快速显示和漫游。
本文采用分块、分级的金字塔存储调度策略,来突破32位寻址限制和快速文件调度。其主要思想是:将整体正射影像按照几何位置分割成小的存储单元,并按设定的排列方式存储成单个小块影像。为了使存储的影像格式不仅能突破大小的限制,又能为影像的快速显示提供快速的缓冲,除了进行分块外,还分别对分块影像构建金字塔。显示时可根据当前视图窗口的缩放倍率确定需要读取的金字塔影像级数,再根据显示范围读取分块影像,并将此部分取出,按几何位置填充到事先分配的缓冲区中,最后,将缓冲区内的影像数据显示到屏幕上,为了保证漫游的平滑和连续性,提高漫游的速度和质量,漫游过程中在后台对缓冲区进行实时的更新和填充。金字塔多级显示如图4所示。
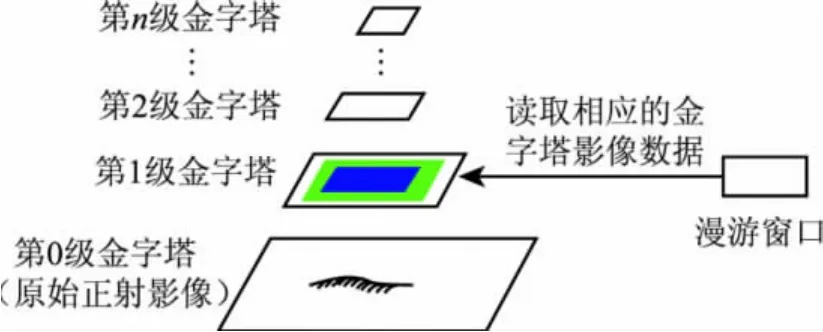
图4 大容量影像存储结构与影像显示示意图Fig.4 Storage structure and display of large image
2 正射影像的制作实验
本文所采用的实验数据是由Leica的ALS50-II以及附属RCD 105像机(镜头焦距35 mm)按物探飞行模式获取的。为了完成本文的实验,首先按LiDAR数据处理流程对LiDAR获取的点云数据经过点云滤波后生成整个区域的 DEM[5,6],如图5所示。

图5 原始LiDAR点云数据Fig.5 Original LiDAR point cloud data
由于附属RCD 105像机与LiDAR所带的POS系统关系没有直接测定,不能将LiDAR系统中的POS数据直接作为原始影像的外方位元素。本文采用了自动影像匹配方法,量测两两影像的同名像点,并将这些同名像点作为像点观测值,将LiDAR系统中POS数据作为初值进行光束法区域网平差,平差后的POS数据作为原始影像的外方位元素,实现了LiDAR数据与影像的配准。
利用影像外方位元素和由LiDAR点云生成DEM,按本文提出的正射影像生成方法,生成的区域整体正射影像如图6所示。图中蓝色多边形为由泰森多边形确定的最佳影像采样区域和接边线。

图6 正射影像图与由泰森多边形确定的拼接线Fig.6 Orthophoto and mosaic line based on Thiessen polygon
3 结论
通过以上实验可以验证,在物探飞行模式下,利用LiDAR激光雷达系统可以解决此模式下正射影像的快速生成问题,满足资源调查的需要,是一种正射影像快速制作的有效方法,同时得到以下结论:
(1)利用泰森多边形建立有效的正射影像获取范围和自动拼接线,是快速正射影像生成的关键,影像拼接精度小于一个像素。
(2)快速正射影像的制作精度取决于影像外方位元素LiDAR点云构建的数字高程模型精度。
(3)由于LiDAR点云自动处理方法不能获得真正DOM,只能得到数字表面模型,因此,对DEM以及DOM进行人工编辑,是不可完全避免的。
(4)分块、分级的金字塔存储调度策略实现了海量正射影像的存储、显示等操作,突破了32位文件系统的限制,实现了真正意义的海量影像存储。
[1] 张祖勋.数字摄影测量研究30年[M].武汉:武汉大学出版社,2007.
[2] 张祖勋,张剑清.数字摄影测量学[M].武汉:武汉测绘科技大学出版社,1996.
[3] 张剑清,潘励,王树根.摄影测量学[M].武汉:武汉测绘科技大学出版社,2003.
[4] 段延松.基于网格的正射影像整体制作方法[D].武汉:武汉大学,2009.
[5] 邬建伟,马洪超,李奇.顾及语义的机载LiDAR点云格网化方法[J].测绘科学技术学报,2008(2):87-89.
[6] 李英成,文沃根,王伟.快速获取地面三维数据的LiDAR技术系统[J].测绘科学,2002(4):35 -38.
The Application of Rapidly Produced Orthophoto to Aero Geophysical Survey
CAO Hui1,GUO Da-hai2,WANG Jian-chao2,DUAN Yan-song1
(1.School of Remote Sensing and Information Engineering,Wuhan University,Wuhan 430072,China;2.China Aero Geophysical Survey & Remote Sensing Center for Land and Resources,Beijing 100083,China)
This paper discusses the rapid production of orthophoto in the situation of flight pattern of aero geophysical exploration.The Thiessen polygon method is used to build sampling area and automatically generate orthophoto of the measured area,with no need to carry out manual edge processing.Considering the characteristics of inmagnanimous images with large quantities of data,the authors propose a method characterized by demonstration,roam,and zoom of magnanimous image based on pyramid memory scheduling strategy of piecemeal and graduation.
Orthophoto;Thiessen polygon;Magnanimous image
TP 75
A
1001-070X(2011)03-0067-04
2010-11-30;
2011-02-05
国家863计划项目(编号:2006AA06A208)。
曹 辉(1963-),男,副研究员,主要从事摄影测量与遥感的教学与科研工作。
(责任编辑:刁淑娟)
猜你喜欢
中学生数理化·七年级数学人教版(2022年9期)2022-10-24 02:55:56
少年漫画(艺术创想)(2020年2期)2020-06-15 11:00:34
中学生数理化·七年级数学人教版(2019年9期)2019-11-16 09:11:40
趣味(数学)(2019年11期)2019-04-13 00:26:32
华东师范大学学报(自然科学版)(2018年3期)2018-05-14 10:27:18
公务员文萃(2016年10期)2016-10-31 00:44:23
遥感信息(2015年3期)2015-12-13 07:26:50
电测与仪表(2015年22期)2015-04-09 11:42:14
读者(2014年21期)2014-10-15 03:14:40
测绘科学与工程(2013年4期)2013-03-11 15:07:44
