利用LiDAR 技术获取数字正射影像应用研究
2010-12-08 08:53:30于建涛李雪萍
黄河水利职业技术学院学报 2010年4期
于建涛,李雪萍
(河南省中纬测绘规划信息工程有限公司,河南 焦作 454002)
0 引言
数字正射影像(DigitalOrthophotoMap,简称DOM)是以像元为基础,把航空摄影影像数据纠正到数字地面模型上,消除航摄像片倾斜误差和地形起伏引起的投影差,再经过镶嵌、切割,从而直接得到的一种新型数字测绘产品。 它具有信息性、时效性、直观性、连续性(一定历史时期的影像连续反映)、时间性、现势性等特点,广泛应用于城市规划、土地管理、环境分析、绿地调查和地籍测量等方面。
机载激光雷达(Light Detection And Ranging,简称LiDAR)是一种安装在飞机上的机载激光探测和测距系统。 LiDAR 系统可以通过扫描装置,沿航线获取高精度、高密度的三维坐标数据,从而快速生成高精度的数字正射影像,也可以在数字正射影像上进行各种专题地图和对地形图的更新应用。 笔者试结合2007 年在舟山机场附近进行的908 海岛海岸带调查, 对应用LiDAR 技术获取DOM 的方法进行探讨。
1 利用LiDAR 系统时的基础数据
1.1 航摄的基本情况
2007 年,在舟山机场附近进行的908 海岛海岸带调查的数据获取区域面积为16 km2,所用相机为4K×5K 大面阵彩色CCD 数码相机,相机焦距40 mm。其他主要航空遥感数据如表1 所示。
1.2 采集的数据类型
此次航摄所采集的数据有IPAS 数据、GPS 基站数据、LiDAR 数据以及航空影像数据。
2 LiDAR 系统的布设与量测
机载LiDAR 系统工作示意图如图1 所示。

表1 908 海岛海岸带调查的主要航空遥感数据Table 1 Main aerial remote sensing data of 908 island coastal zone investigation

图1 机载LiDAR 系统工作示意图Fig.1 Airborne LiDAR system working sketch
2.1 基站布设与基站联测
为准确记录飞机飞行姿态曲线,在飞行区域内,架设了GPS 固定基准站。 用地面GPS 固定基准站采集的数据和IPAS 系统内部的双频GPS 接收机采集的数据,进行差分测量,并对测量数据进行处理,可获得连续的、更精确的传感器位置。 对GPS 基站单点静态12 h 连续测试得到的数据与同时间段的国家经纬网高精度载波相位观测值进行联合平差计算,可得出测点的绝对坐标。
2.2 像控点布设和检查
像控点布设按照GPS 辅助航空摄影外业控制区域网布控的原则进行。 一般沿区域网周边,在每条航线东西两端各布设1~2 个高程控制点,在垂直于航线方向的中间区域两平高控制点之间、影像旁向重叠部位布设高程控制点。 当像控点布设或联测困难时,调整左右相邻控制点间基线数。 分区接边处的控制点尽量选择公用,不能公用时,分别布点,使不出现控制漏洞。
2.3 校准航线布设与测量
为了确定惯性导航系统(IMU)、LiDAR 和数码相机相互框架位置关系的系统差,确定GPS 天线相位中心与机载激光雷达(LiDAR)、数码相机之间的偏心矢量和摄站高程的系统差,需要飞行校准航线。 在考虑飞行便利、有明显地物标志和地面控制点(GCP)测量等因素的条件下,校准航线设计在舟山机场附近。 校准航线布设原则如下:(1)检校场应设置3 条相邻的平行航线,每条航线不少于6~8 个像对。 (2)航向重叠和旁向重叠均按50%设计。 (3)在检校场的周边布设不少于6~8 个地面控制点(GCP),点位与影像角框标连线距离约为影像宽的20%。 (4)地面控制点(GCP)应选在能准确判断点位和高程变化不大的地点。
3 地面高程数据DEM 和数字正射影像的获取
3.1 地面高程数据DEM 的获取
完整地块地表裸露点的三维数据构成地面高程模型DEM。 用TerraScan、TerraModel 软件进行激光点数据处理(去除各种噪声和误差点)后,提交激光地面点数据,该数据在ERDAS 9.0 软件中可生成高精度的DEM(如图2 所示)。数据处理过程如图3 所示。
3.2 数字正射影像的获取
制作数字正射影像的整个工艺流程主要分为数字正射影像(DOM)的生成、影像拼接和后处理3 个部分。 航片的前期处理和数字正射影像制作的流程如图4 所示。

图2 测区的DEMFig.2 DEM of measuring zone
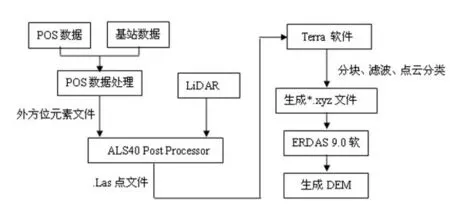
图3 LiDAR 点云数据处理过程Fig.3 Cloud data processing procedure of LiDAR point

图4 数字正射影像处理Fig.4 Digital orthophoto map processing
3.2.1 数据前期处理
(1)原始影像转换。 因为原始影像为JPEG 格式,现有的遥感软件不能处理,所以用软件ERDAS 9.0 的IMPORT/EXPORT 模块把原始影像转换为后期处理软件能够识别的TIFF 格式。
(2)对所有影像进行匀光处理。 辐射水平差异会导致同名影像在相邻图像上的亮度值不一致,为了保证相邻图像的几何接边、 灰度和色调接边,用ERDAS 9.0 的ImageEqualizer 对所有影像进行匀光处理,使其色调均匀、反差统一。
3.2.2 数字正射影像图的制作
使用遥感软件ERDAS 9.0 的LPS 模块进行建立金字塔、内定向、外定向等处理,并导入生成的DEM数据,进行正射与拼接,最终在ERDAS 9.0 中对图像进行分幅裁剪、修整和出图。 在这一过程中需要注意的是:(1)设计镶嵌线走向时,应反复观察重叠区的地物特点。 在农田较多的地方,可沿地块边界选取镶嵌线点。 在城区,应在街道上选取镶嵌线点,且镶嵌线应绕开居民区。 因为每张影像拍摄的时间、角度不同,房屋及树木阴影的方向也不尽相同,此时镶嵌线较明显,如果镶嵌处无法避开居民地,镶嵌线会因投影差的不同,使拼接后镶嵌的影像产生变形、失真或缺损等现象。 所以,镶嵌线最好从街道、河流中间穿过,尽量避开阴影处。 (2)镶嵌成图时,尽量沿线状地物影像变换处画镶嵌线,避免穿越房屋、地块、变形地物等,还应注意影像间的重叠关系。 (3)增加结点时,应考虑在开阔区域,这样镶嵌线容易编辑。 (4)注意是否满足成图范围,再逐幅裁切。
3.2.3 图廓整饰和影像地图输出
正射影像生成并且精度评定合格后,可以根据需要裁切。 利用ERDAS 9.0 输出TIFF 文件,并进行灰度处理(使灰度基本一致)后,镶嵌生成一整幅DOM。 然后,根据1∶10 000 图幅的坐标,按坐标裁切,生成数字正射影像DOM,并添加比例尺、图名、制作单位等信息。 系统叠加后,生成TIFF 格式的该图幅影像图。 图5 为试验区的数字正射影像图。
4 数据检核
4.1 检核方法
在测区范围内,进行RTK(Real-time kinematic,实时动态差分法)量测,获取地面22 个检核点(图2和图5 的★表示检核点)。 然后,将测量的检核点叠加到正射影像图上,并与拼接好的影像进行判定比较,就可得出正射影像图的点位平面误差。 将设定测区的多条航线LiDAR 数据生成的DEM 进行拼接,生成整个测区1m×1m 的DEM,然后,选择测区内地面检核点与LiDAR 生成的DEM 进行对比计算,就可得出高程误差。
4.2 检核结果
通过对比,获取的正射影像图点位平面中误差为0.422 m,其中最大的点位中误差为2.229 m,最小点位中误差为0.010m;得到的高程中误差为0.114 m,其中最大偏差为0.463 m,最小偏差为0.003 m。 由此表明,利用LiDAR 手段所获取的数据结果具有高准确度,能够满足1∶10 000 甚至更大比例尺的成图精度要求。

图5 测区的DOMFig.5 DOM of measuring zone
5 结语
利用LiDAR 技术快速获取的高精度数字正射影像是一种极具价值的基础地理数据,其主要作用为:(1)用于对数字线划图数据的更新,提高数据的现势性,加快地形图的更新速度。 (2)作为背景图直接应用于城市各种地理信息系统。 (3)与线划图、文字注记进行叠加,形成影像地图,丰富地图的形式,增加地图的信息量。 (4)在生成正射影像的同时,还可得到地面高程数据和等高线数据。
数字正射影像和数字高程模型叠加生成的三维立体景观模型,使我们在计算机屏幕上就可以从任意方向观看特定区域的三维立体景观,有一种身临其境的感觉,更有利于解译。 另外,用它还可以制作成数字地图,服务于其他行业。 随着人工智能的进一步成熟,数字正射影像将不再仅仅是测绘的一种产品,而是很多产品的基础资料。
[1] 张祖勋,张剑清. 数字摄影测量[M]. 武汉:武汉大学出版社,2000.
[2] 骆文英. 浅谈数字正射影像图制作中的镶嵌技术[J]. 北京测绘,2002(4):24-27.
[3] 魏富朝,王洪峰. 利用LIDAR 技术获取大比例尺DEM 应用实践[J]. 山西建筑,2007,33(19):359-360.
猜你喜欢
幼儿教育·教育教学版(2023年2期)2023-06-23 11:18:58
装饰装修天地(2020年7期)2020-06-01 18:43:59
华东师范大学学报(自然科学版)(2018年3期)2018-05-14 10:27:18
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
中国工程咨询(2017年12期)2017-01-31 02:56:54
工业设计(2016年7期)2016-05-04 04:01:15
安徽地质(2016年4期)2016-02-27 06:18:21
新校长(2016年8期)2016-01-10 06:43:49
遥感信息(2015年3期)2015-12-13 07:26:50
电测与仪表(2015年22期)2015-04-09 11:42:14