广州地铁4号线列车EP2002制动系统介绍及故障分析
2010-11-27 05:57:18万宇
铁道机车车辆 2010年6期
万 宇
(广州地铁车辆中心,广东广州510730)
广州地铁4号线采用KNORR(克诺尔)生产的EP2002系列电气模拟指令式制动控制系统。4号线采用的是架控式,即一个制动微机控制单元控制一个转向架,同一列车的两个(A+B)车作为一个单元进行制动控制。
编组列车的每个A车安装有一个第4轴切除电磁阀,由于4号线车辆全为动车,为了能在ATO模式下更好的采集速度信号,将每个A车的第4轴空气制动切除,防止列车出现滑行而导致列车速度采集信号失真。
该系统由一个G阀(网关阀,Gateway Valve)和一个S阀(智能阀,Smart Valve)组成一个分散式制动控制网络。每辆车具有一个G阀和一个S阀(图1),通过制动控制总线连接。每个阀靠近转向架安装实施制动控制。每个G阀提供与VVVF牵引系统和TMS系统的接口,同时接受列车指令指示列车状态和制动等级。为保持冗余性,系统中所有G阀功能相同,两个G阀的I/O接口能相互替换。每个G阀和监视系统之间有硬件连接指示器,用于对EP2002阀位置的识别。
系统运行时,在以两辆车为单元组成的制动系统网络中,其中一个G阀为主阀。制动指令通过TMS系统向制动和防滑电子控制装置传递,主阀向各个制动阀分配相应的制动力进行制动和防滑控制。列车制动指令以数字模式输入,通过模拟信号传输到PWM,并在TMS备份(图2)。
主G阀进行混合制动,它计算并传输模拟制动指令,接受处理ED达到的制动力。在分散式制动网络中,ED制动反馈数据通过模拟接口传输给主阀和另一个G阀。除接受和传递ED制动数据,主G阀也通过TMS传输诊断信号以进行故障诊断。
同时另一个G阀处于待命状态来监视主阀的状态。一旦主阀出现故障,通讯给另外一个G阀,备用G阀取代主G阀的功能,由其他3个阀补充故障阀所失去的制动力,避免了因为一个阀的故障而导致整节车制动力的消失,这样提高了列车运行的可靠性,这是4号线EP2002系统比其他线路制动系统最大的优点。
1 制动控制
1.1 制动功能介绍
广州地铁4号线列车制动类型包括常用制动、紧急制动、快速制动、停放制动、保压制动、防滑保护等。
PWM列车线向系统发出制动指令,并以TMS网络作为备用,制动指令转换成相应的压力指令,与得到的电制动比较计算后主阀通过制动线向其他阀分配相应的制动力。
(1)常用制动控制
常用制动控制可以通过列车线、制动模式以及电源模式的不同匹配,利用PWM列车线或TMS网络方式实现。制动控制以PWM列车线为优先,若PWM列车线出现故障,将以TMS网络作为备用来控制制动。
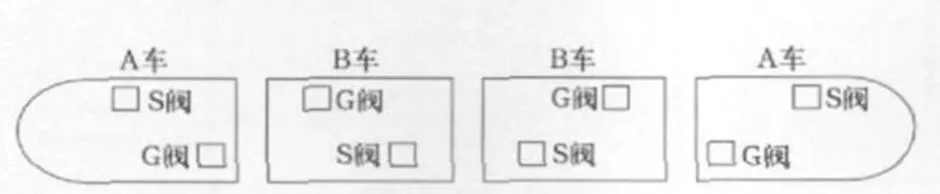
图1 阀的布置

图2 制动系统网络
利用模拟信号向G阀发送制动命令,主G阀得到命令后通过CAN总线向本单元(A车+B车)的G阀和S阀发出制动指令。
在人工或ATO控制下,常用制动力在0%—100%之间连续变化(即平均减速度在0—1.0 m/s2之间连续变化)。常用制动的实施和缓解的平均冲击限制值小于0.75 m/s3。该数值可调节。
(2)快速制动
快速制动(平均减速度为1.3 m/s2)通过一条单独的110 V列车线来激活,激活时电压值为110 V。
(3)紧急模式下的常用制动控制
无论哪个制动阀检测到紧急制动,都将产生满负荷最大常用制动力作为紧急制动的备用。紧急制动时,VVVF的电制动将被禁止,但是电制动力有效的信号不会减少常用制动压力。
(4)车轮滑动控制
在4号线列车每根轴上各安装有一个速度传感器,用于检测车轴速度,并通过CAN总线将速度传递给各个EP2002阀。如果检测到列车有滑行,车轮防滑控制装置启动,EP2002阀将检测到的速度通过制动网络进行比较,监测并控制车轮滑行,并将监测到的车辆滑行状态传输给TMS。
(5)空气弹簧载荷
通过在列车每个转向架上取一个空气弹簧的压力信号,并从每辆车上的两个转向架采集的空气弹簧压力取平均值,作为载荷信号计算空气制动压力。系统通过连续采集空气弹簧压力信号,不断地计算空气制动压力,将载荷信号连续不断的传送给TMS。当TMS系统发出所有车门均被关闭的信号时,载荷信号将被固定(如图3)。
1.2 EP2002阀介绍
广州地铁4号线车辆制动系统EP2002阀主要包括S阀和G阀两种。
S阀产生电控制信号直接控制气阀,对该转向架的电空制动和车轮的防滑进行控制,并通过制动CAN总线与G阀进行通信。另外,S阀还对该转向架的空气制动系统进行故障诊断及故障显示。
G阀除了具有S阀的功能外,还具有该节车的停放制动控制和制动管理功能。施加制动时,它接收各种与制动有关的信号,计算出当时本节车所需空气制动力大小的电信号,并将电信号传输给其他3个阀,每个阀根据本转向架的载重而换算出相应的空气压力,并通过空气阀单元调整出需要的空气压力传向转向架的盘形制动器来施加空气制动。
(1)S阀
S阀是制动系统中的电子控制部分,有两部分组成,图4中绿色部分为电子装置,负责通讯和制动控制;黄色部分为阀类元件,负责执行电子装置发出的各项指令。S阀直接安装在被称作气动阀单元(PVU)的气动伺服阀上。S阀负责接收G阀通过CAN总线信号,驱动气动阀单元,实现本转向架的各项制动功能。S阀具有以下功能:①常用制动控制;②紧急制动控制;③每一根轴的防滑功能。S阀通过专用的CAN制动总线把从各个位置所获得的轮轴速度数据与从其他阀门(S或G阀)获得的速度数据组合起来,以此来实现车轮防滑保护;④施加制动显示功能;⑤主风缸低压监控;⑥阀身份定位;⑦阀本身故障监控及状态。
(2)G阀
G阀的电气和气阀部件与S阀相同,除具有S阀的所有功能,还具备了制动计算及分配、本单元车的制动控制和故障性能数据管理功能。除此之外,G阀还负责与TMS和列车线之间的通讯,以及本单元车内的各个阀之间的CAN总线通讯。空压机起停也是由G阀控制(图5)。

图3 BCU控制气路图
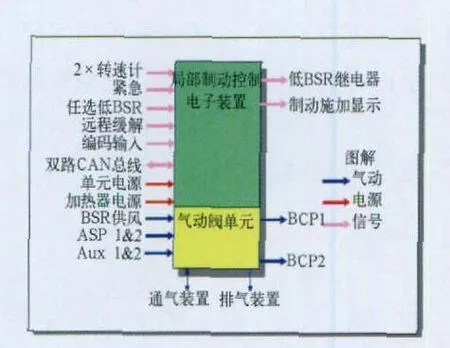
图4 S阀控制示意图

图5 G阀内部功能示意图
1.3 EP2002阀与列车线、TMS和VVVF通讯
EP2002阀通讯接口包括VVVF通讯、TMS、CAN及维护接口、速度传感器、列车线及其他控制线信号(图6)。
(1)EP2002阀与列车线之间的通讯
①110 V直流电源;②0 V地线;③快速制动指令;④紧急制动指令;⑤制动命令;⑥电源模式;⑦保压制动请求;⑧拖车模式;⑨ATO模式;⑩制动需求。这些模拟信号通过列车直接传送给EP2002阀,其中G阀可以接收所有的信号,而S阀只能接收110 V直流电源及紧急制动指令。

图6 EP2002阀通讯示意图
(2)EP2002阀与TMS之间的通讯
EP2002阀通过RS485与TMS进行通讯,TMS作为列车线的热备份,当列车线出现故障,TMS作为备用进行制动控制。除此之外,EP2002阀通过TMS将阀状态及故障信息发送到中央控制单元,并且在显示屏上显示。
(3)EP2002阀与VVVF之间的通讯
正常情况下,主G阀累计计算每个VVVF的电制动力大小,然后计算出所必需的摩擦制动力后,平均地分配给A—B单元的制动阀。G阀和VVVF之间的通讯如图7。
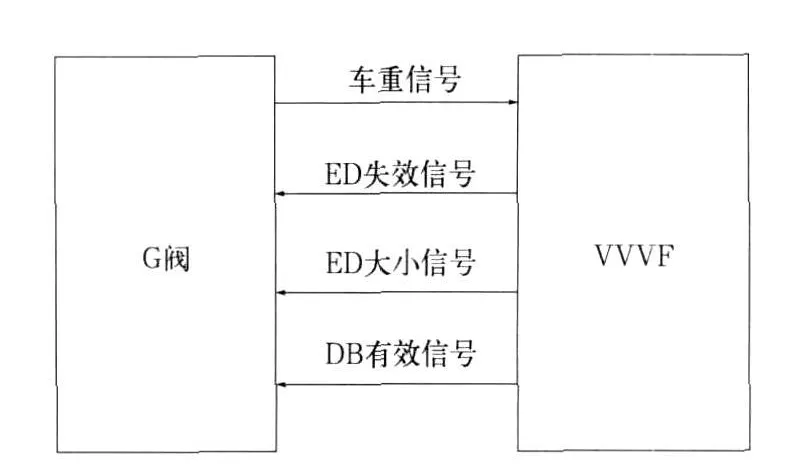
图7 EP2002阀与VVVF之间的通讯
G阀负责与VVVF之间的通讯,并且制动系统与牵引系统只有4个信号进行通讯:
①电制动有效。当VVVF产生电制动时,VVVF发送电制动有效信号给G阀。在制动的开始阶段,制动系统使用该信号限制冲击。电制动有效是二元电频信号,高电频表示信号有效。
②电制动退出。在速度大约为6 km/h(具体数值可调)时,VVVF将会向G阀发送一个电制动退出信号,空气制动压力随之按照比例增大,执行保压制动。除保压制动外,在电空制动转换后,空气制动压力将根据冲击限制与载荷成正比。
③电制动力大小。该信号为4—20 mA的模拟信号,代表0—44 kN的电制动力。制动时,G阀不断接收来自VVVF的电制动力信号,并且根据载荷信号计算列车需要的总制动力,判断是否需要空气制动补充。
④载荷信号。每个G阀将发送车总重信号给VVVF,信号的大小为4—20 mA,对应 AW0—AW3之间的车总重。
(4)速度传感器信号
每个轴的速度传感器信号都直接送给控制转向架的EP2002阀,在CAN内该信息被送至各个EP2002阀。
(5)施加制动信号
EP2002阀内有一个常闭的施加制动继电器,每个阀检测各自转向架的制动缸压力,当制动缸压力>50 kPa,施加制动继电器常闭触点断开,施加制动信号被发出,列车施加制动灯亮;当制动缸压力<50 kPa时,施加制动继电器恢复闭合状态,列车缓解灯亮。
(6)其他信号
G阀通过控制线发出3个信号:空压机开启信号、严重故障信号和ECU关闭信号。
1.4 制动管理
在正常情况下,主G阀累计计算每个VVVF的电制动力大小,然后计算出所必需的摩擦制动力后,平均地分配给A—B单元的制动阀。
每个G阀将发送车总重信号给VVVF,信号的大小为4—20 mA,对应 AW0—AW3之间的车重(图8)。A车AW3=AW0+312×60kg=48.59 t,B车 AW3=AW0+347×60kg=50.69 t,车总重(平均)=(48.59+50.69)/2=49.64 t。
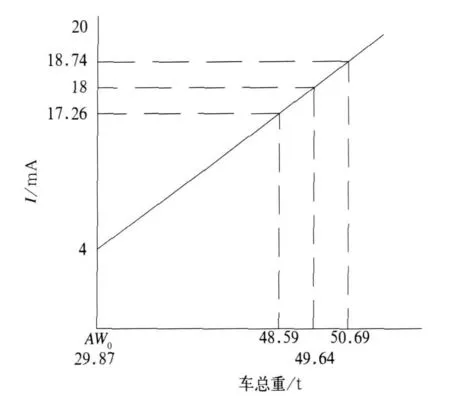
图8 电流与车总重信号关系
当VVVF产生电制动时,VVVF发送DB有效信号给G阀。在制动的开始阶段,制动系统使用该信号限制冲击。①ED大小信号:VVVF发给G阀ED大小信号,G阀算出需要的摩擦制动。
ED失效信号:在速度大约为6 km/h(具体数值可调)时,VVVF将会向G阀发送一个电制动减弱信号,空气制动压力随之按照比例增大。
TMS用由ECU传送来的空气弹簧压力计算出所需的制动力。TMS传送所需的制动力到牵引系统,并监视实际的电制动力。同时TMS也传输所需的制动力给制动系统。TMS传送牵引系统实际的电制动力给制动系统,制动系统用其来减少所需制动力。制动系统从所需制动力中减去实际电制动力,用计算结果来产生空气制动力大小。
正常情况下,主G阀累计计算每个VVVF的电制动力大小,然后计算出所必需的摩擦制动力后,平均地分配给A-B单元的制动阀。当A车或B车的S阀故障时,本单元(A+B)的其余阀通过CAN总线自动补充失去的制动力;当A车的G阀故障时,B车的G阀成为主阀,接收制动命令,本单元(A+B)的其余阀通过CAN总线自动补充失去的制动力;当B车的网关故障时,本单元(A+B)的其余阀通过CAN总线自动补充失去的制动力。
2 地铁4号线制动系统故障分析
广州地铁4号线从2005-12运营至今,EP2002系统总体运行较稳定,但也暴露出一些问题。
2.1 EP2002阀典型故障分析
(1)列车制动速度传感器故障
在对051052车进行制动距离测试试验时,利用制动软件Brake Consultant的REAL TIME功能,发现04B052车第一轴速度传感器没有速度值(见图9)。列出回库后,首先对04B052车第一轴速度传感器齿轮及光栅探头以及接头进行检查,均正常;接着对G阀PL1插头到速度传感器接头之间的线路进行校验,未发现异常。然后将该轴速度传感器连接线与其他功能正常的轴进行互换,故障没有转移。至此,初步确认是由于G阀内速度传感器电源模块故障,不能输出15 V电源所致,通过更换新G阀后试验正常。
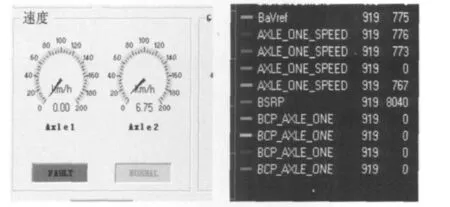
图9 04B052车第一轴速度传感器无信号
(2)G阀故障
正线053054车53单元正线报ECU严重故障,导致清客。列车回库后,多次读取53单元车制动数据不成功,通过复位04A053车制动控制电源,强制将主G阀转换至53B车后,能够读取 53单元制动数据,通过故障数据记录发现04B053车G阀频繁报出网上出现阀丢失、CAN总线通讯丢失等故障。
ECU故障数据分析发现53单元有一个阀开始频繁的出现与主G阀通讯中断,而且通过切换A车主G阀后就能顺利读取故障数据,怀疑出现通讯故障的阀就为A车G阀。随后检修人员更换了04A053车G阀,重新上电试验制动红点消失,制动功能正常,上试车线进行牵引、制动动态试验均正常。
(3)S阀故障
04A002车正线报 ECU严重故障,故障代码为7001。列车回库后读取 ECU制动故障数据,并对04A002的G阀、S阀的插头等部件进行外观检查,校核A车G阀与S阀、A车G阀与B车G阀之间的CAN总线,校线未发现异常,屏蔽线接地也正常。根据故障发生的时间及工况,对04A002车数据分析后初步怀疑为A车S阀有故障。
由于ECU严重故障是通过G阀内的ECUFR常闭触点动作,经605线发给CCU的。检查该段线路也是正常的。至此,可以排除由于外部线路导致的故障,通过更换故障端04A002车的S阀后试验正常。
2.2 通信干扰
4号线开通初期,许多列车由于CAN总线受通讯干扰出现的ECU红点故障频繁,多次造成正线晚点、清客事件,对正线运营带来较大影响。
通过对列车红点故障统计,发现其故障代码均为CAN_BUS_FAILED SET,MESSAGE-LOST-ERROR SET,故障描述为主G阀与S阀之间的通讯中断,提示需要检查CAN总线。将电器柜和车下CAN总线屏蔽线接地,列车报制动系统通讯中断故障明显减少,但是还是未能完全解决列车非EP2002阀硬件故障导致的ECU红点故障问题。
4号线列车制动系统与车上其他系统一样,主要通过列车硬连线进行控制,网络控制为辅。ECU与TMS之间通过不断发送和接收数据,来保证良好的通信,即TMS发送SDR(状态数据请求)给ECU,当ECU接到SDR后发出SD(状态数据)给 TMS,但是当出现①ECU超过250 ms没有收到SDR;②数据包校验和持续检测时间小于或大于250 ms;③SDR的校验码超过250 ms还没有更新3种情况时,ECU将会发送一个NOSDR信号给TMS,而TMS检测到这个信号超过3 s未清除,就会报出ECU通信错误故障。选用一列车进行试验,通过制动软件发送NOSDR信号给TMS,通过TMS检修界面的传输数据检查,确认ECU与TMS之间的通信正常。
随后,克诺尔对4号线所有列车制动系统车载软件进行优化,提高列车制动系统EP2002阀内故障触发报警等级,使得问题得到了很好的解决。
2.3 防列车溜车
4号线列车进站停车后曾出现过列车发生溜车的情况,对正线运营造成重大影响。通过分析,当列车在处于坡道位置停车时,容易发生溜车;同时还发现当列车在人工驾驶模式下不会出现溜车,但是在ATO模式下却容易出现溜车的情况。究其原因是由于保压制动的施加时间问题,如果在列车停车后才施加保压制动,就容易出现溜车的情况。如果列车在停车前就开始施加保压制动,就不会出现溜车的情况。
在人工驾驶下,列车保压制动的施加是在列车运行速度降至0.2 km/h时延迟0.6 s时由车辆牵引系统发出;而在ATO模式下,只有在列车停车后的0.3—0.9 s时间内,信号系统才发出保压制动指令。有针对的要求列车在ATO模式下,待列车停稳之后,向后拉动手柄,使列车提前发出保压制动指令,有效的解决了列车行车的情况。
2.4 未安装假针
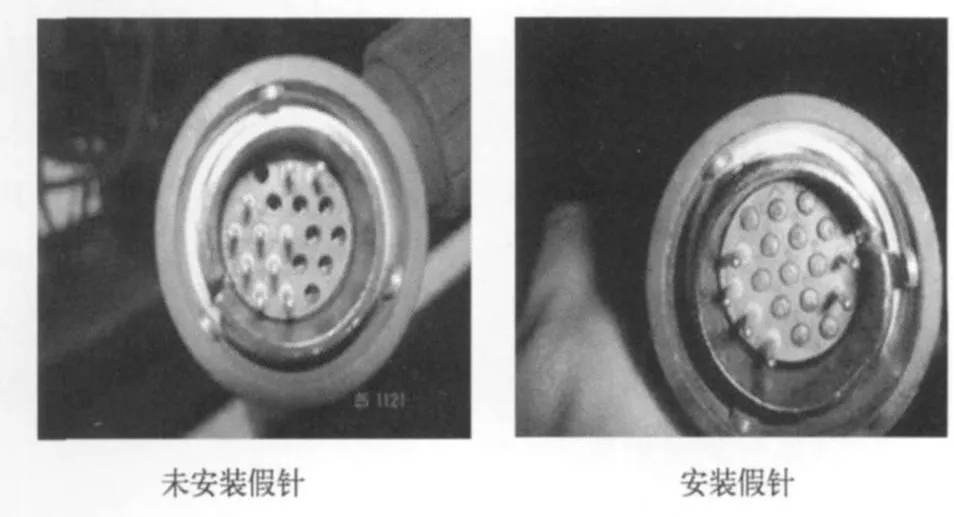
图10 EP2002阀插头
在4号线EP2002系统使用较长时间,阀A、B插头的空缺针孔内都没有安装密封针。由于EP2002阀A、B插头的空缺针孔未密封,插针底座因有空孔导致受力不均,使插针容易退针和歪斜,影响插头拔插效果,同时插头有孔,灰尘和水气容易渗入。因此,对插头进行改造,首先用润滑剂对插头内的空缺针进行润滑,将塑料假针埋入插头。通过对假针的补装,A、B插头内的插针没有再出现有弯曲和退针现象,有效降低了制动系统故障(如图10)。
3 结束语
EP2002制动系统作为新产品在广州地铁4号线投入使用,其系统结构紧凑,部件模块化程度高,维护工作量低,系统功能较稳定。但在使用过程中也出现一些问题,其价格比较昂贵,且一旦阀内部出现故障,检修车间没有得到维修授权,且暂不具备维修能力,需要进行委托外部维修,维修成本高。
[1]周志辉.广州地铁3号线电动车组的制动控制[J].电力机车与城轨车辆,2004,(4):14-17.
[2]朱 翔,肖向前.广州地铁3号线列车EP2002制动系统及故障分析[J].机车电传动,2008,(3):58-59.
[3]KNORR-BREMSE.B-ET21.200-enRev7[Z].Germany:KNORR-BREMSE,2009.
猜你喜欢
城市轨道交通研究(2024年1期)2024-02-23 07:28:36
茶叶通讯(2022年2期)2022-11-15 08:53:56
茶叶通讯(2022年3期)2022-11-11 08:43:50
机械研究与应用(2022年4期)2022-09-15 02:17:04
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
现代城市轨道交通(2020年1期)2020-02-14 15:35:49
铁道通信信号(2020年11期)2020-02-07 01:02:34
制造技术与机床(2019年12期)2020-01-06 03:17:46
西南交通大学学报(2018年5期)2018-11-08 10:58:26
中国科技信息(2016年19期)2016-10-25 08:17:29