
GPS L1信号C/A码的高效并行软件相关器研究
2010-11-05 06:42陈然梅杓春
电子测试 2010年3期
陈然,梅杓春
(南京邮电大学自动化学院 南京210003)
0 引言
传统的GPS接收机中靠专用的芯片实现的信号处理功能[1]。GPS软件接收机使用软件方法和少量的硬件进行GPS信号接收处理。与传统硬件接收机相比,软件接收机更具方便性和灵活性[2]。图1表示了一个基于PC的GPS软件接收机的示意框图。软件接收机的这种通用的架构,使得其能在比较短的设计周期里,通过更改软件来实现新的信号处理算法。
国外在软件接收机的研究方面趋于成熟,并且有多通道的GPS软件接收机产品。如L2通道实时的双频民用GPS软件接收机[3]。而国内在GPS软件接收机的研究方面比较落后。而本文是在前期开发的基于PC平台的用C语言实现的非实时软件接收机的基础上,对跟踪通道中十分耗费时间的相关运算进行算法优化。
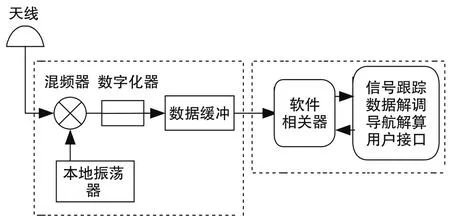
图1 GPS软件接收机的示意框图
1 L1信号的相关算法
在GPS软件接收机中,数字中频信号首先被本地载波(加载频多普勒)剥离载频;混频输出的I和Q信号与超前、即时和滞后的本地复现码(加码多普勒)发生相关,从而实现GPS信号的捕获与跟踪[4]。
GPS发射的信号包含载波信号、扩频码序列和导航电文3个部分[5]。接收到的时域L1 C/A码信号经过RF模块下变频,经过采样得到的数字中频信号可以表示为下式:


本地复现信号由两个部分组成,本地载波信号和本地码[6]。在载频±10kHz内,以175Hz频率间隔生成115个不同频率零相位的本地载波信号。本地码采用即时、超前和滞后码三路。所以本地复现信号的I和Q支路可以分别表示为下式:
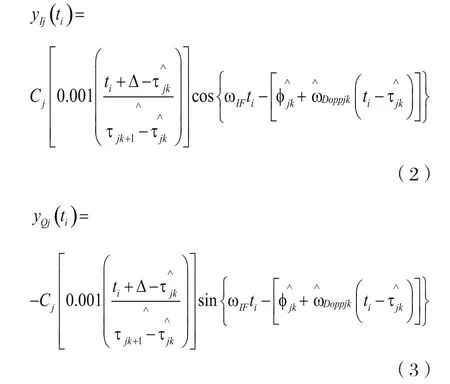
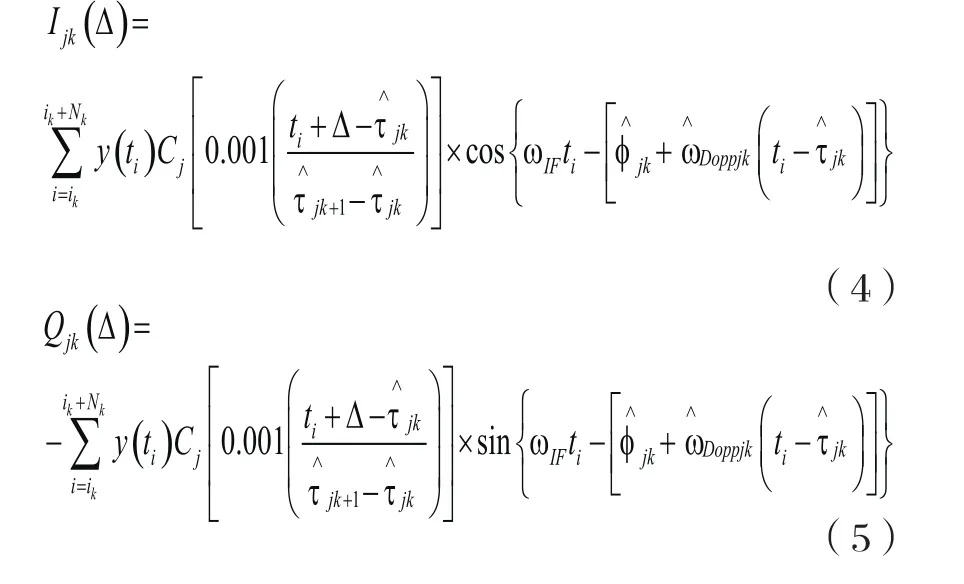
数字中频信号与本地复现信号中频率最靠近载频的本地载波混合,并与C/A码混合后的信号积分累加后可表示下式:
2 相关算法的数学实现
在软件相关器中,数字中频信号与本地载波混合,与本地即时、超前和滞后码进行相关,全部通过位运算的方式来操作;同时,数字中频信号与本地复现信号混合后的积分累加工作可以通过查表法实现[7]。
2.1 基带混频
采样后的数字信号每个采样点含有两个二进制位,一个是符号位,另一个是幅度位。数字信号的可能值是 和 ,如表1所示。
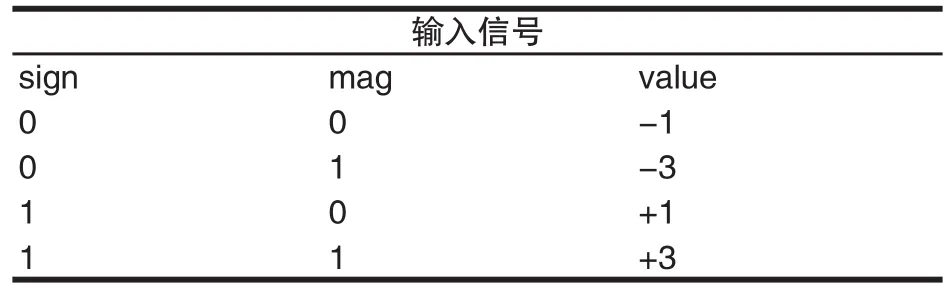
表1 数字中频信号
在频率间隔为175Hz的情况下,用2比特的SIGN和MAG表示频率点上的COS和SIN信号,如表2所示。假定COS和SIN信号的幅度为2.4。

表2 本地载波信号
对输入信号SIGN位和载波信号SIGN位的“异或”操作和对数据位的重定义完成了基带混频。输出信号的SIGN位和本地载波的SIGN位进行异或得到新的SIGN位,HIGH MAG位和LOW MAG位分别是输出信号的MAG位和本地载波的MAG位。表1的射频前端输出信号和表2的本地载波相乘产生了一个结果,这个结果包括以下的值:, , , 。这些值可以用3比特来表示,如表3所示。

表3 数字中频信号和本地载波的混频
2.2 基带信号和本地C/A码信号的混频
基带信号和即时码的相关由 时的式(4)和(5)来定义,基带信号和早晚码的相关是
软件相关器产生C/A码并把它存储到存储器中,即时码是按照单个SIGN位来存储,如表4所示。早晚码以2比特来存储。

表4 本地 C/A码
基带信号和本地码的相关也可以通过异或操作和比特位的重定义来实现。假设有一个表3所表示的3比特的基带信号和表4所表示的本地即时码。表3的SIGN位和表4的SIGN进行异或得到表5的SIGN位,这个混频信号的高幅度位和低幅度位分别等于表3中基带信号的高幅度位和低幅度位。
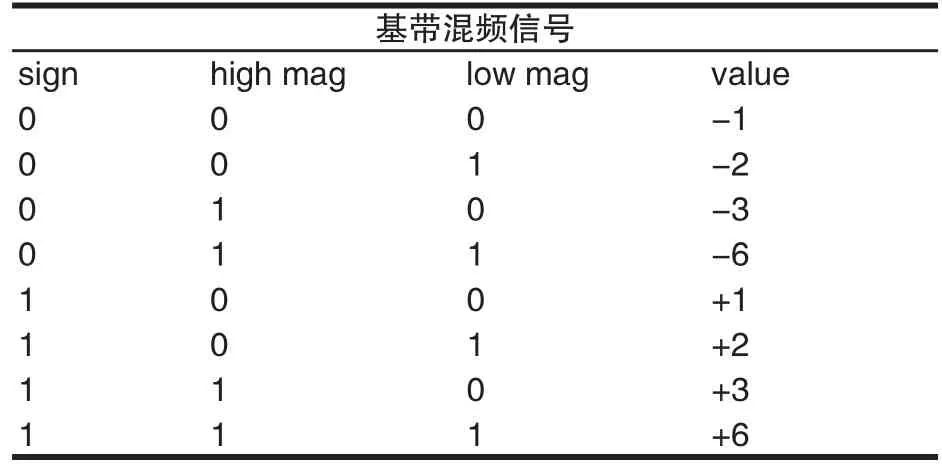
表5 完全基带混频信号
2.3 相关积分
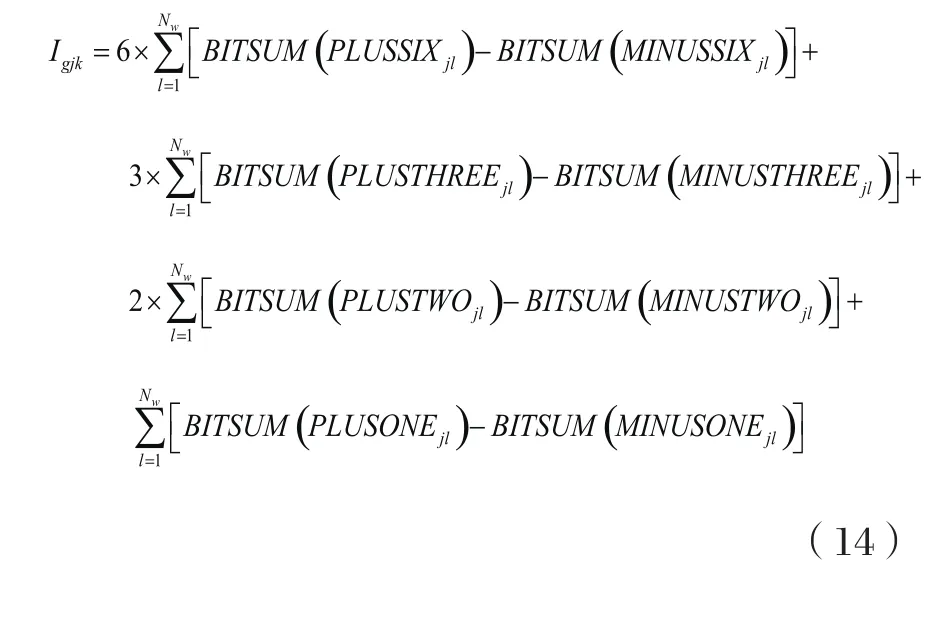
相关计算中的最终操作是把在给定的伪码周期中所有的采样点的结果相加。积分操作是将表5中8个不同值的个数计算出来,这可以根据下面的式6到式13计算得到[8]。
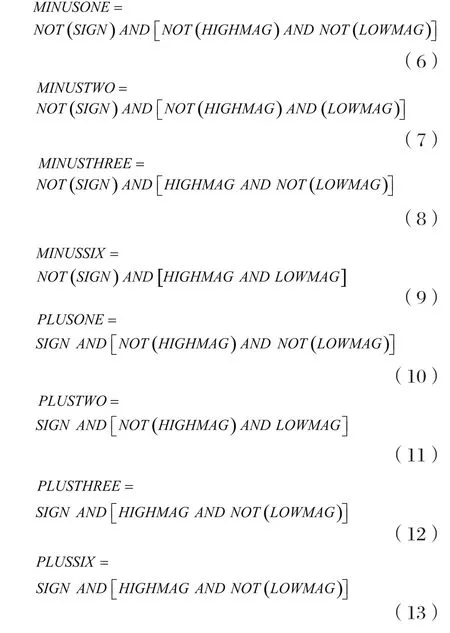
然后通过查表的方式来统计8个不同的值的个数。根据式14可以计算出即时码同相支路的积分值。正交支路和早晚码的同相和正交支路可以用相同的操作进行计算。
3 实验结果与结论
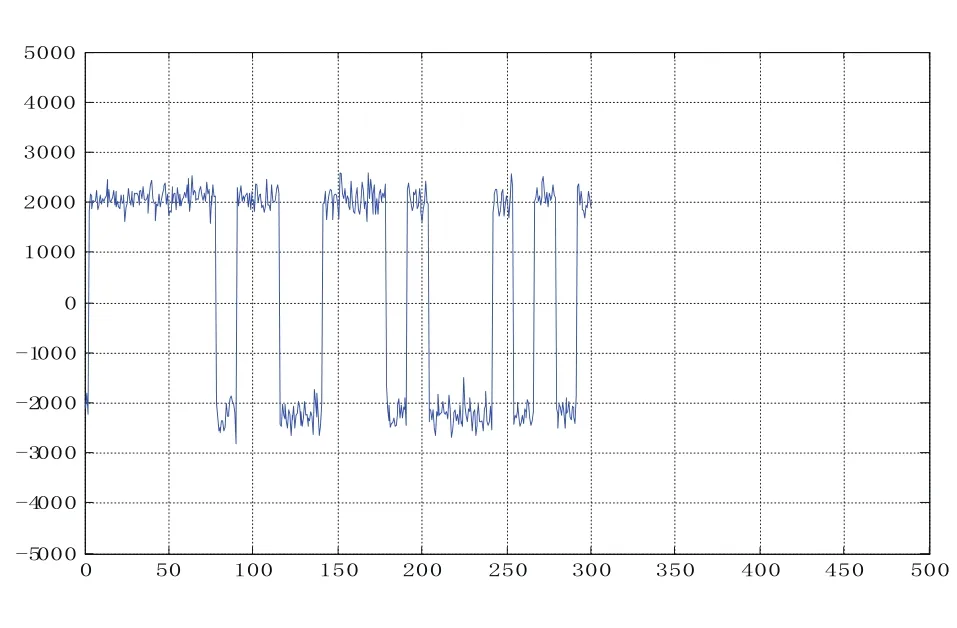
图1
经过在1.73GHz的PC上的试验,运用高效并行软件相关器的GPS软件接收机大大的提高了速度,仅仅用了1.73 GHz PC 的40%的处理能力,而且根据上图表明使用高效并行软件相关器对跟踪结果影响不大。
本文研究了基于PC平台的GPS软件接收机中相关器算法,并且在捕获和跟踪中实现了高效并行软件相关器。整个软件接收机中软件相关器用比特智能的并行算法去进行有效的基带混频和CDMA信号的相关计算,大大的提高了相关器的运行速度。证明了用软件相关器完全可以实现达到硬件相关器的性能。
[1] 黄智伟.GPS接收机电路设计[M].北京:国防工业出版社,2005:1-13.
[2] B.M.Ledvina, M.L.Psiaki.A Real-Time GPS Civilian L1/L2 Software Receiver[J]. Proceedings of the Institute of Navigation GNSS, 2004(9): 24-26.
[3] Kai Borre, Dennis Akos.A Software-Defined GPS and Galileo Receiver: Single-Frequency Approach.
[4] Jin Tian, Qin HongLei, Zhu JunJie, Liu Yang. Realtime GPS Software Receiver Correlator Design, 2008.
[5] 牛国朋.单频软件GPS接收机设计与实现研究[J].中国门户网,2008.
[6] JAMES BAO-YEN TSUI, Fundamentals of Global Position System Receivers-A Software Approach, 2000.
[7] Kaplan.Understanding GPS: Principles and Applications, 1990.
[8] Li Shi-bing, Wang Mei-ling, Liu Tong. Design of software of GPS receiver based on GP4020[J]. Journal of Chinese Inertial Technology, 2006, 14(4):35-38.
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
股市动态分析(2021年25期)2021-12-30
兰州理工大学学报(2021年1期)2021-03-09
通信产业报(2019年26期)2019-08-30
宇航计测技术(2018年3期)2018-09-08
制造业自动化(2017年2期)2017-03-20
电信科学(2016年9期)2016-06-15
电测与仪表(2016年13期)2016-04-11
数字通信世界(2015年5期)2015-04-04
电工技术学报(2014年7期)2014-11-15
