某型机载近距导航设备检测仪的设计与实现
2010-09-28 07:48:24马二涛李建海刘保华
电讯技术 2010年3期
马二涛,李建海,刘保华,王 平
(空军工程大学工程学院,西安710038)
1 引 言
航空无线电近距导航系统用于飞机的导航、着陆,以及飞机间导航,地面信标台显示空中情况,是航行驾驶综合体的无线电设备之一,其性能好坏将直接影响战机飞行安全和战术性能的发挥[1],但近距导航系统信号交联关系复杂,其故障不易判断。文献[2]介绍的机载近距导航信标模仿仪在功能上模拟地面信标台,只能检查机载信标接收机的好坏;另外,俄制近距导航检测设备存在数量少、效率低、可维护性差、维修和升级困难等问题。为此,新研制了一种模块化、自动化、智能化高的导航精度检测仪,可以对近距导航设备组件进行检测,又可以与其它检测设备交联对航行驾驶综合系统进行故障分析检查。
2 原理简介
检测仪用于近距导航设备定期检修工作以及各项参数、性能测试,校准和显示近距导航设备所测得的方位角和距离值。模拟方位角信号和距离信号都是通过延时电路实现的,分别由“北”信号脉冲和接收距离询问信号的译码脉冲启动延时电路,最后计数脉冲变成相应的交流信号送到方位、距离指示器,从而达到测量的目的。其电路原理如图1所示。
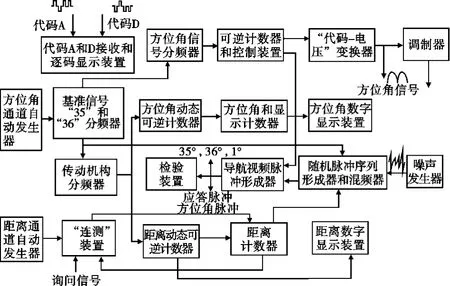
图1 近距导航检测仪电路原理图Fig.1 Short-rang-navigation check-up equipment circuit principium
3 硬件设计
以PC104嵌入式计算机为平台,采用自顶而下的模块化结构,按检测仪的功能分为电源模块、CPU模块、时钟模块、方位模块、距离模块、噪声模块、串码接收译码显示模块和检验模块,通过PC104数据和地址总线连接各功能模块完成检测任务。其功能框图如图2所示。

图2 检测仪功能模块Fig.2 The equipment function modules
3.1 方位模块
方位模块用于产生0°~360°范围内的方位模拟信号以及方位脉冲信号。由于方位信号是一个双钟形信号,其中间零值代表真正的方位,因此产生方位信号应在方位真值点之间开始。不同的信标类型,其双钟形方位信号宽度不同,所以要根据信标类型来决定方位信号起点相对于方位真值点的提前量,为此,采用了一种特殊的计算方法。功能框图如图3所示。
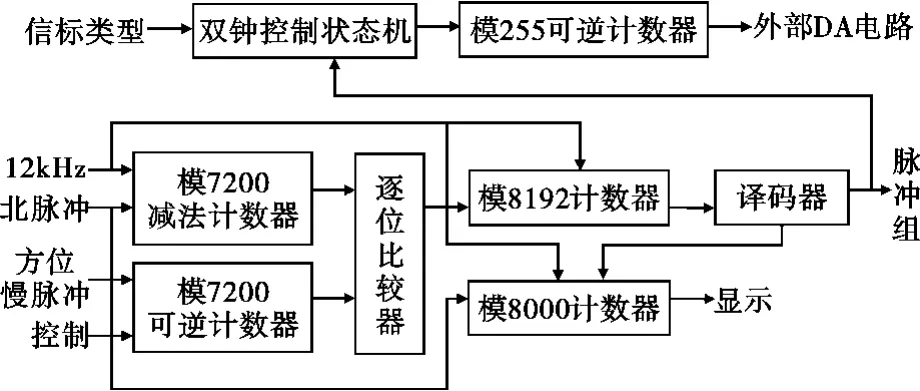
图3 模拟方位角产生原理Fig.3 Simulated orientation circuit principium
时钟模块产生的方位慢脉冲送到模7200可逆计数器,在外部控制信号的作用下对该慢脉冲进行加、减计数,以及停止、清零操作;同时,模7200减法计数器在北脉冲的触发下将6253值预置到计数器中,同时启动对12 kHz脉冲信号进行减计数。这两个计数器的计数值在逐位比较器中进行比较,当两者相等时,产生一个相等脉冲。相等脉冲送到模8192计数器,进行加计数,根据其计数值的不同,由译码器产生各种方位信号。
译码器产生的方位角起始脉冲及基准脉冲送到双时钟控制状态机,在其控制下,模255可逆计数器对两种频率的脉冲分阶段进行加/减计数,在DA电路输出端得到双钟形方位角信号。DA电路采用AD558数模转换芯片,输出电压范围0~10 V,通过面板上的电位器进行幅度调节后送到其它电路中。
另外,北脉冲除了触发模7200减法计数器,还触发模8000加法计数器进行加计数,直到模8192计数器的译码器送给它一个停止信号,它才停止计数,同时将计数值送到外部显示单元,其计数值代表从北脉冲开始到方位脉冲产生的时间间隔。
3.2 距离模块
距离模块的基本原理也是将数码变换成时间间隔。距离模块主要用来对机载设备送来的距离询问脉冲进行可变延时以模拟不同的距离,同时产生相互坐标询问回答脉冲、零距离检验脉冲。选用14.989 58 MHz晶振源,其节拍周期相当于10 m的模拟距离。距离模拟通过形成T4延时来实现,如图4所示。
延时从询问脉冲计到应答脉冲,由 T1、T2、T3延时相加而成。其中 T1+T3是固定延时,在全向状态下,T1+T3=τ1μ s,在定向状态下,T1+T3=τ2μ s。模拟距离值由可逆计数器给定,以并行二-十进制码形式写入距离计数器。随着询问脉冲到达,定位测量置打开,自激振荡器脉冲送到T1延时计数器输入端开始计数,在T1结束时,产生一个加载脉冲,将慢计数器的计数值预置到快计数器中,并启动减计数,经过一定延迟时间 τ3,节拍脉冲序列送到距离计数器上以形成T2延时,而T2是模拟距离产生的延时,当快计数器减到零时,产生溢出脉冲,触发T3延时,T3延时结束时产生距离为 τ的回答脉冲。

图4 距离模拟工作时序图Fig.4 Simulated distance work time
3.3 噪声模块[3-4]
实际机载设备与地面设备通信中存在各种衰落、干扰和噪声。噪声模块产生一定密度的随机噪声,叠加到各种信号上,以检测设备的抗干扰性能;同时形成一定概率的选通脉冲对距离回答脉冲进行控制,以检测设备测距通道的跟踪记忆性能。其原理如图5所示。
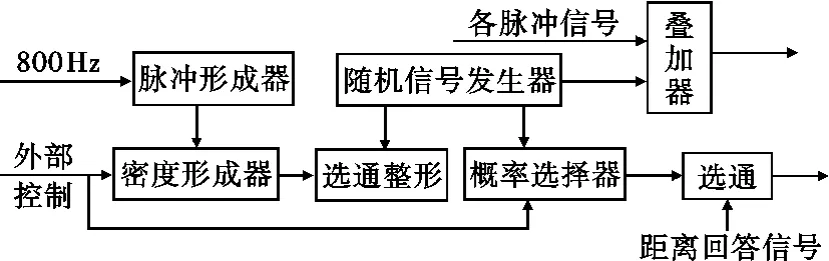
图5 噪声产生及控制原理框图Fig.5 Noise generation and control
随机信号发生器中,选取r=7、反馈系数为235的序列,对应的特征多项式为

根据伪随机序列产生的原理,采用行为描述方式用VHDL语言对该逻辑进行硬件描述,由Quartus II进行时序仿真,结果如图6所示。
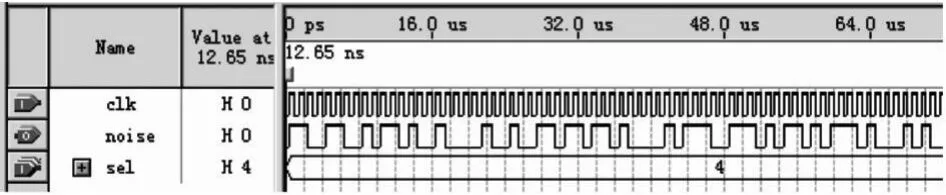
图6 伪噪声序列仿真图Fig.6 Pseudo noise sequence simulation
伪随机序列发生器使用FPGA器件,与由多个分立元件和集成块构成的信号发生器相比,克服了易受温度变化和电磁干扰影响的缺点,且有可控性强、调试方便、性能稳定的特点。可以根据需求随时调整序列长度以及时钟脉冲周期,从而达到与真实噪声相似的干扰效果。
通过选用不同宽度、不同频率的选通脉冲对噪声序列进行控制,实现不同的噪声密度与选通概率,将这些序列与方位信号、距离回答信号等脉冲信号进行叠加,以检测抗噪性能。
3.4 时钟模块
检测精度主要决定于计数振荡器的频率和频率稳定度。因此,选用了型号为OX3627B的恒温晶体振荡器。其工作电压为12 V,最大功耗为3.6 W,在25℃条件下恒定功耗不超过1.2 W,其频率稳定度达到10-9。由于晶振源输出标准正弦波,峰-峰值为1.6 V,因此需要增加外围电路将其转化为TTL波形,为此我们设计了转换电路。晶振信号到放大器放大后再和参考源经比较器输出。放大器选用压摆率为300 V/μ s的高速电压负反馈集成放大器OPA355,比较器选用传输延迟为4.5 ns的TLV3501,保证转换波形的带宽,参考电源选用LM4140r的1.25 V参考电压源,以确保转换信号的频率稳定性。
3.5 其它模块
电源模块采用温漂非常小的军品高精度稳压管、电容、电阻、三极管、电压比较器组成的保护电路。外部输入的27 V直流电压防欠压、防过压、防过流保护进行DC-DC转换为检测仪工作所需的各种电压。
时钟模块是检测系统的基础模块,产生各种脉冲信号是其它功能模块工作的基准,主要产生的信号有 35/36 基 准脉冲 、北脉冲 、0.25°/0.5°/1°/2°脉冲、方位/距离慢计数脉冲,以及100 Hz/700 Hz/12 kHz/60 kHz等其它一些时钟信号。
送到串码接收译码显示模块的串码有两种,一种是机载设备送来的4类串码数据,另一种是由外部测试孔引入的串码数据,用于测试。这两种码源可以通过软件面板进行选择,被选中的串码数据经过单极化处理后由节拍形成器形成移位节拍,辅助串并转换单元对串码进行移位形成32位并码,根据选择的不同信息字地址进行输出显示。
检验模块用于对检测仪产生的主要信号以及外部机载近距导航设备送来的信号进行检验,用指示灯状态来表明检验结果。
4 软件设计
利用面向对象的编程方法,借助Visual C++6.0可视化开发工具,采用多线程技术,保证了软件实现的实时性;并用WinDriver开发了在Windows XP下运行的硬件底层接口驱动程序,其流程如图7所示。

图7 软件流程图Fig.7 Flow chart of software processing
4.1 基于MFC类[5]
使用MFC类编写检测系统程序,控制灵活,效率高,可靠性强。
4.2 多线程
采用主界面、查询、操作3种线程:主界面线程提供友好的人机交互界面,在主界面下集中显示各种检测信息;查询线程查询各硬件寄存器的状态;操作线程完成对硬件的各种访问控制。
4.3 底层驱动
Windows XP操作系统是基于NT5内核的,对硬件访问进行了保护,因此,采用WinDriver开发硬件驱动,实现与Windows底层的通信和硬件的交互,其端口读写地址范围为0x280~0x28f,并采用ISA接口8位操作。
5 实验对比
将距离或方位清零,在不同的档位测量距离、方位在60 s内的变化,经过10次测量求其误差平均。测试结果见表1。

表1 误差分析Table 2 Error analysis
6 结束语
检测仪与原俄制设备相比,实现模块化、智能化升级,能快速准确地故障定位,提高了检测精度,解决了一个排故难题。其中数字电路部分全部集成在FPGA芯片中,器件多选用贴片式,具有结构紧凑、体积小、重量轻等特点,有较强抗冲击、抗振动能力。实际使用证明,仪器的使用性、可靠性、维修性都显著提高,本检测仪的研制对维修保障飞机以及任务的完成,具有重要现实意义。
[1]李建海,毕笃彦,陈高平.综合无线电导航系统(上册)[M].西安:空军工程大学,2002.LI Jian-hai,BI Du-yan,CHEN Gao-ping.Synthesis aviation radio navigation system[M].Xi′an:Air Force Engineering University,2002.(in Chinese)
[2]范谋堂,程文聪.机载近距导航信标模仿仪的硬件设计与实现[J].空军雷达学院学报,2005,19(1):51-53.FAN Mou-tang,CHENG Wen-cong.The design and realization of Airborne Short-Rang-Navigation beacon emulator hardware[J].Journal of Air Force Radar Academy,2005,19(1):51-53.(in Chinese)
[3]Hans-Jurgen Zepernick,Adolf Filgen.伪随机信号处理[M].甘良才,等,译.北京:电子工业出版社,2007.Hans-Jurgen Zepernick,Adolf Filgen.Pseudo Signal Processing[M].Translated by GAN Liang-cai,et al.Beijing:Publishing House of Electronics Industry,2007.(in Chinese)
[4]辛春艳.VHDL硬件描述语言[M].北京:国防工业出版社,2005.XIN Chun-yan.Very High Speed Integrate Circuit Hardware Description Language[M].Beijing:National Defense Industry Press,2005.(in Chinese)
[5]明日科技,宋坤,刘锐宁,等.VisualC++开发技术大全[M].北京:人民邮电出版社,2007.MINGRI Ke-ji,SONG Kun,LIU Rui-ning,et al.Visual C++Development Technology Complete Dictionary[M].Beijing:People′s Post&Telecommunication Press,2007.(in Chinese)
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:50:34
北京航空航天大学学报(2022年6期)2022-07-02 01:58:46
煤气与热力(2022年2期)2022-03-09 06:29:30
电子制作(2019年7期)2019-04-25 13:16:56
电子制作(2017年20期)2017-04-26 06:57:32
物理实验(2017年2期)2017-03-21 07:20:41
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10 08:41:20
同煤科技(2015年4期)2015-08-21 12:51:06
汽车维修与保养(2015年8期)2015-04-17 03:33:03
河南科技(2014年10期)2014-02-27 14:09:30