
空管二次雷达S模式询问机目标捕获与监视实现方案*
2010-09-26 04:32
电讯技术 2010年7期
(中国西南电子技术研究所,成都610036)
1 引 言
空管二次监视雷达(Secondary Surveillance Radar,SSR)是空中交通管制系统(ATC)的重要组成部分,是监视飞机飞行航迹和状态的一种地面传感器。二次监视雷达技术来源于西方体制敌我识别系统,20世纪50年代Mark X敌我识别器解密后,其技术推广应用于民用领域,形成了最初的二次监视雷达系统,该系统最显著的特点是采用了问-答式的协同识别方式。
传统的二次监视雷达系统采用A/C工作模式,分别用于监视飞机的编号和高度,初期的系统存在大量的窜扰、混扰、旁瓣干扰。20世纪60年代以后,随着单脉冲体制、询问旁瓣抑制、接收旁瓣抑制等技术的引入,二次雷达系统内部存在的窜扰、混扰、旁瓣干扰等固有干扰造成的不利影响在一定程度上得到缓解,使得该系统在世界各地的空中交通管制体系中迅速普及和广泛使用[1]。然而随着空中交通密度的增大,尤其是在欧洲和北美等经济发达地区,A/C模式的遗留问题——窜扰和混扰再一次引起了人们的关注,从而提出了一种新的SSR工作模式,被美国联邦航空管理局(Federal Aviation Administrator,FAA)命名为S模式[2-5],并在国际民航组织规范附件10(ICAO ANNEX10)中进行了规定。S模式显著的技术特点主要体现在两个方面,一是通过选址询问减少了系统内部干扰,二是同时具备了监视和数据链通信能力。
尽管ICAO ANNEX10中规定出了S模式询问和应答信号的具体格式以及数据项的具体含义,但是在实际S模式询问机设计过程中,设计者还是需要根据实际情况对系统的工作流程作出完善和高效的编排,才能够保证该系统能够正常投入使用。例如,目前A/C模式和S模式还处于共存阶段,如何让S模式询问机能够同时对A/C模式目标和S模式目标保持监视;又例如,S模式选址询问之前,需如何将目标捕获和锁定;再例如,当多个S模式目标位于询问天线的同一波束内时,如何编排选址询问时序以保证对多个目标的同时监视等具体技术问题都需要解决。本文将从实际工程设计出发,对上述几个问题进行探讨,并提出具体的解决方案。该方案已成功应用于一种新研制的S模式二次雷达询问机,工作于1、2、3/A、C以及S模式,可脱离一次雷达独立跟踪监视全空域A/C及S模式目标。
2 A/C与S组合模式规划
首先我们分析一下A/C模式和S模式询问和应答的基本信号格式和时序,然后再进行询问流程的组合设计。A/C模式信号格式见图1,S模式信号格式见图2。其中A/C模式的应答延时为3 μs固定延时,加上信号的空间传输延时t;S模式的应答延时为128 μs固定延时,加上信号的空间传输延时t。
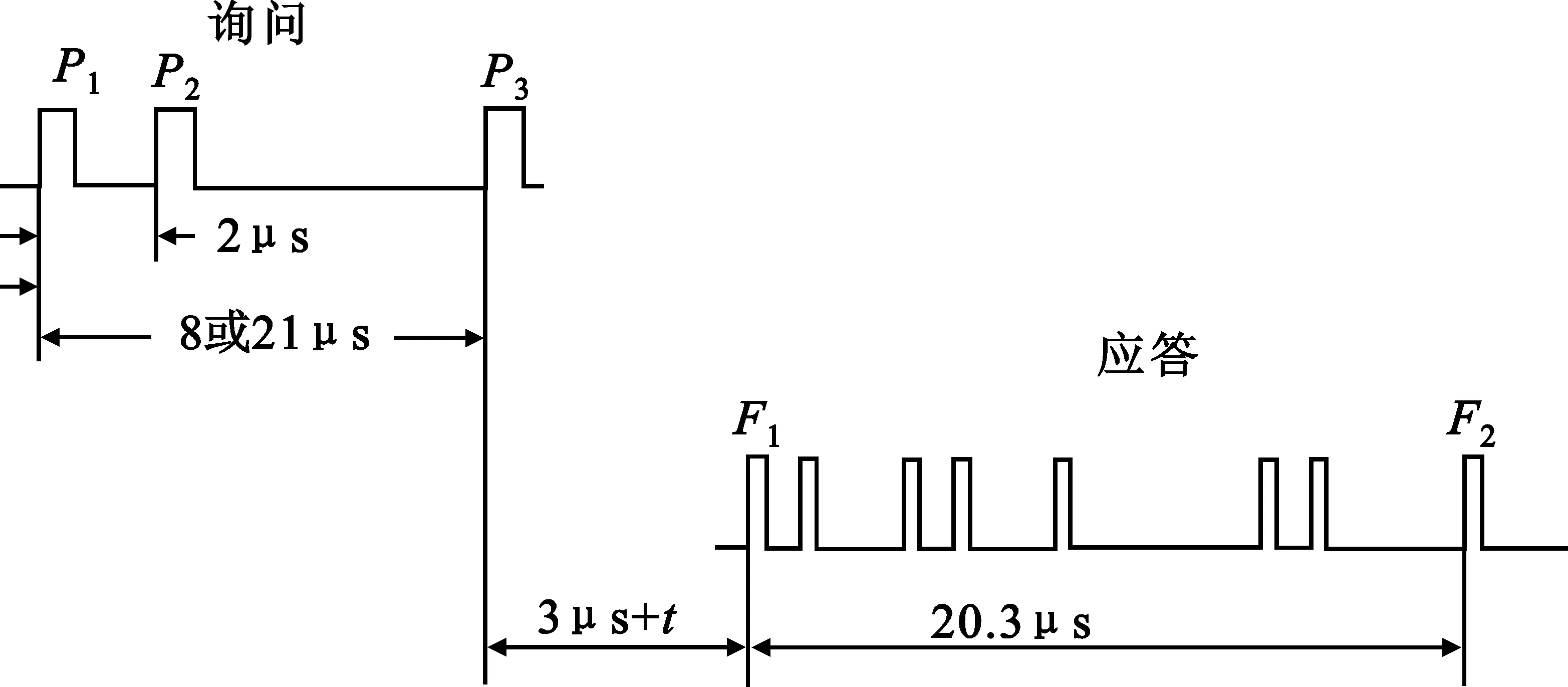
图1 A/C模式询问及应答信号格式
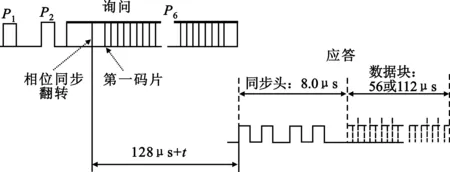
图2 S模式询问和应答信号格式
我们对询问机的工作方式进行分析后认为,要让S模式询问机实现对A/C模式和S模式目标的同时监视,必须让询问机既发出A/C模式询问,又发出S模式询问,然后既接收A/C模式应答又接收S模式应答,分别进行处理。
为分析方便,假设询问机参数如下:作用距离为450 km,询问天线波束宽度为3°,询问天线扫描速度为10转/分,询问重复频率为100 Hz。基于以上参数计算,目标驻留波束的时间为Tb=3/[(360×10)/(60×1000)]=50 ms,一个驻留波束内询问次数为N=Tb/10=5次。
首先我们可以设计一种简单直观的A/C和S模式交替询问方式,将驻留波束内的5次询问按照第1次为A/C询问,然后进行A/C应答解码,第2次为S询问,然后进行S模式应答解码,第3次为A/C询问,然后进行A/C应答解码,如此反复,如图3所示。那么在一个驻留波束内,只能够进行2~3次的A/C模式询问和2~3次的S模式询问。然而根据经验,要对A/C模式目标进行可靠的监测,需一个驻留波束至少进行4~5次A/C模式询问才能进行点迹凝聚处理,S模式也至少需要4次询问来完成多目标监视和数据链传输流程。因此这种询问时序的效率不足,不能满足系统性能的要求。另外,A/C模式全呼叫进行监视询问时,S模式应答机既可以回答S模式询问又能回答A/C模式询问,因此可能被误认为是两架飞机。
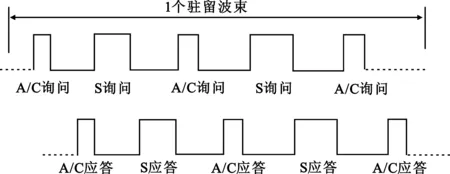
图3 A/C和S模式简单交替询问工作时序图
为解决上述问题,更好的办法是设计出A/C和S全呼询问组合的方式,既可以提高时间使用效率,同时在监视A/C或S目标时, S模式与A/C模式应答机最多只能回答其中的一个询问信号,这样可以避免询问器在目标监视时将同一架飞机当作两架飞机。
通过对图1和图2中A/C及S模式工作时序进行分析后,我们采用同时监视S模式目标与A/C模式目标全呼叫询问波形,如图4所示。它是两种全呼叫询问的组合波形,其中A/C模式全呼模式按ICAO附件10的规定增加了一个标志脉冲(脉宽0.8代表仅A/C模式全呼叫,S模式应答机不会应答)。该方案可以共享询问之后设置的收听时间窗,提高时间利用率,两种全呼叫询问信号之间的时间间距。这样设计还可以确保询问机能同时收到来自等距离的A/C模式应答机或S模式应答机的回答信号以方便测距。
图4中为了确保A/C模式应答机在接收A/C模式全呼叫询问信号之前有足够时间从S模式同步头中P1~P2产生的旁瓣抑制状态恢复过来,两个询问信号之间的时间间距至少要45 μs,图中给出的时间间距是接收零距离S模式全呼叫应答信号不受干扰的最大时间间距。
当A/C模式应答机收到该组合询问时,由于它只具有辨别A/C询问的能力,所以只会对其中的A/C询问进行响应,而当S模式应答机收到该组合询问时,可以通过辨别A/C全呼中的标志脉冲(脉宽1.6 μs代表S模式),选择只响应S模式询问而忽略A/C模式询问,从而避免双模式应答。
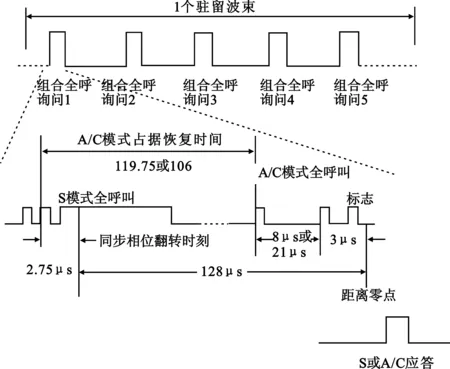
图4 组合方式实现A/C和S模式同时工作的时序图
3 S模式目标捕获
S模式与传统A/C模式最显著的区别之一就是可以实现对指定目标的选址询问,即只有被指定的目标才响应选址询问,其它目标即使收到这个询问也不会产生应答信号。要对监视范围内的目标进行选址询问,前提条件就是将范围内的S模式目标都进行捕获。获得这些目标的S模式地址、距离、方位等数据,并将其进行锁定设置,使该目标以后不会继续响应本询问机的全呼叫询问,而只响应本询问机的选址询问,以便减少全呼叫“同步混扰”。这一获取目标信息特征并将其锁定的过程我们称为S模式目标的捕获。
这种闭锁条件由S模式地面站通过选址询问进行控制。不管什么原因,飞机只要在大约18 s周期(对应于3~4个天线扫描周期)内没有接收包含闭锁命令的选址询问,则现存的任何闭锁状态将失效,以便地面站可以使用正常的S模式捕获方式对该飞机进行重新捕获。
实际系统中S模式全呼询问和选址询问是共存的,对于新出现在空域中的目标我们通过全呼询问进行捕获,对于已经捕获的目标我们通过选址询问来保持对其持续地监视。在具体实现方式上,我们采取了全呼叫询问(包括A/C模式全呼叫和S模式全呼叫)周期与S模式选址询问周期交替进行的方式,如当前波束内没有确定的S模式目标,就仅进行全呼叫询问,否则就进行全呼询问与选址询问相结合的交替询问,如图5所示。
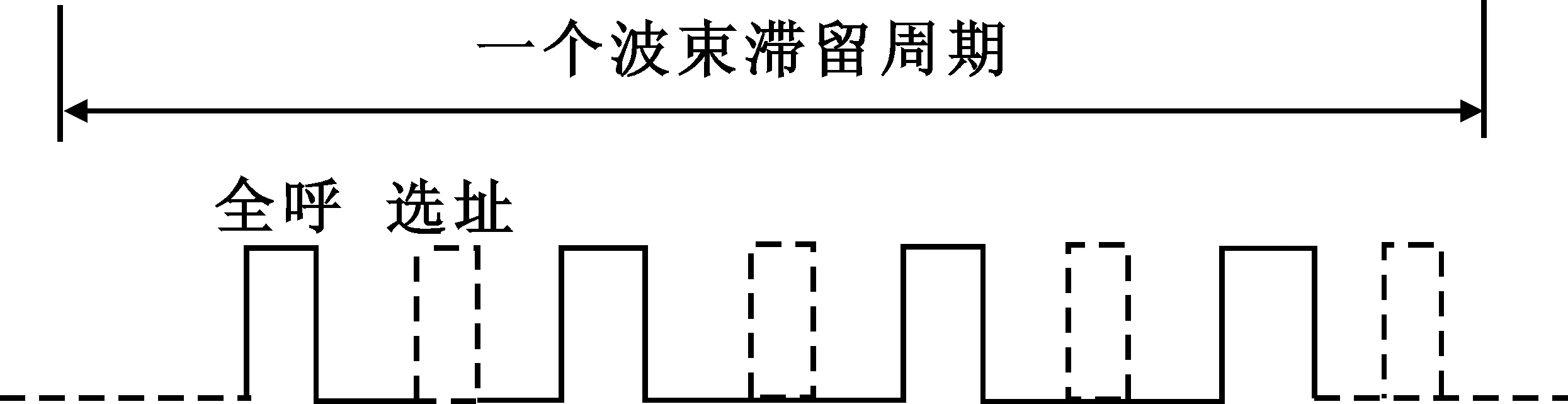
图5 全呼询问与S模式选址询问时间分配
询问机启动后刚开始工作时,仅进行全呼叫询问(格式为UF11),S模式应答机的全呼回答信号被询问机解码后送至航迹处理器进行处理,几个扫描周期后航迹处理器建立好该目标的航迹,将下一周期目标的预估位置送回,询问机在随后的询问中对该目标采用带锁定的选址询问(格式为UF5或UF4)将其锁定,完成捕获工作。
捕获模式的选择上,ICAO ANNEX10中规定的有多站捕获模式、锁定忽略模式、非选择性模式等,但根据欧洲航空管制的相关经验,推荐使用多站捕获模式,因此我们在实际工程中设计和使用的是带自适应应答概率的多站捕获模式。
自适应的多站捕获模式具体步骤如下:
(1)刚启动航管询问机时,由于所有的目标都未捕获,在全呼叫询问周期的S模式全呼询问(UF11)中,指定应答机采用较低的应答概率(应答概率PR可在询问机的本地控制监视器上设置),询问格式如表1所示。

表1 S模式全呼叫询问(UF11)数据格式Tab.1 Mode S all-call interrogation(UF11) dada format
全呼询问时地址为24个1,地址/校验码按照ICAO ANNEX10中规定的算法得到。应答概率的范围最高为1,最低为1/16。
(2)S模式应答机在接收到UF11全呼询问后,按DF11应答格式进行全呼应答。询问机通过信号处理得到应答机通信能力码、地址码、目标距离、目标方位等信息,若因混扰等因数造成解码失败,将得到解码失败标志信息,并将信息传送到航迹处理器。若一个波束周期内同一目标应答了多次,询问机还应进行点迹凝聚,仅送出一次该目标数据。
DF11应答信号格式如表2所示。

表2 S模式全呼叫应答(DF11)数据格式Tab.2 Mode S all-call reply(DF11) data format
(3)航迹处理器在数个扫描周期后建立好确认的航迹,预推下一天线扫描周期目标的位置,并提前将该目标的地址和预计位置传送询问机。
(4)询问机按照目标的地址和方位,在该目标进入波束后启动UF5代码监视选址询问报文,并使用闭锁参数锁定目标,使其不再响应本询问机的全呼询问。
UF5询问格式如表3所示。

表3 S模式代码监视选址询问(UF5)数据格式
(5)初始扫描开始后,每经过10个天线扫描周期,且前一周期未出现全呼解码失败,将PR应答率提高1倍,直到应答率达到100%。在此后的扫描过程中,若询问机发现了解码失败标志,且连续3次全呼询问此标志不消除,即可认为该方位出现了混扰现象,记录下当前的天线指向角度和扇区号,当下一扫描到达该扇区及其相邻的左右扇区时,将当前的PR应答概率降低1倍。若全呼解码仍然不成功,下一扫描周期该方位继续降低PR应答率,直到无混扰现象出现。混扰消除后,下一扫描周期将该方位PR率提高1倍,直到恢复到与其它扇区相同的正常值。这就是自适应PR率的调节过程。
采用这种自适应随机多站捕获技术后,对于混扰区域的目标的捕获效率大大提高,据统计,混扰区域内的目标数和将其中某个特定目标捕获所需的天线扫描周期数如表4所示。

表4 混扰区域目标捕获情况统计表
4 S模式选址询问方案
选址询问所需的待询问目标信息来源于航迹处理器和地面数据链处理器(GDLP),航迹处理器送出目标的预估方位和距离,GDLP送出针对某目标的数据链需求,这两种来源的信息在S模式询问机中汇总,针对每一目标形成一个数据和信息的集合,并进行选址询问的时序编排,我们设计的选址询问方案如下所述。
在询问机中,有两张目标列表在使用和刷新,其中一张表是尚未处理的目标全列表(简称全列表),另一张表是当前波束内的未处理目标列表(简称波束列表)。在每一轮选址询问后,这两张表都将根据询问的结果和收到的新目标数据进行刷新,已得到预期结果的目标将从表中删除,未处理完的目标继续保留在表中,新目标也将添加进入表中。
航迹处理器或GDLP送来的新目标首先将进入全列表,询问机将把全列表按照目标方位先后顺序进行排序,即先将进入询问波束的目标排在表头,后进入询问波束的目标排在表尾。每轮选址询问结束后,首先把事务处理完毕的目标从全列表和波束列表中删除,读取新的目标和事务来更新全列表,然后读取当前天线的指向角度,判断全列表中是否有目标可进入波束列表,并把波束列表中的目标按照距离远近的顺序进行询问顺序编排,在下一轮选址时即可按照此编排好的时序启动询问。
波束列表中的时序编排方法如下:首先,波束列表中距离最远的目标1,它的询问启动时刻为ti1,根据目标的距离可计算出应答到达的时间tr1,把tr1加上目标1应答格式的时间长度以及1个保护时间间隔,可确定目标2应答的到达时间tr2,根据目标的距离可反推出其询问启动时刻ti2,以此类推,可逐步计算出第n个目标的询问启动时刻tin和应答到达时刻trn,最后一个目标的询问启动时间tin加上询问格式的长度应保证处于第一个目标应答到达时间tr1之前,否则就应把目标n的询问启动时间编排在已经编排的所有目标的应答到达时间之后。
编排时序应该注意到以下几点:
(1)由于全呼询问频率是固定的,两个全呼询问之间用于选址询问的这段时间也是有限的,所以选址询问的编排不能无限长,如一轮询问不能选址到波束中的所有目标,可将剩余的目标在下一轮选址询问中编排;
(2)由于在每一轮选址询问结束后询问机还需进行一系列复杂的数据处理和传输工作,例如读取应答结果,进行全列表和波束列表的刷新,编排下一轮选址时序等,这些工作必须在下轮全呼询问开始前完成,处理时间将非常紧张。因此,我们在每一轮选址询问的最后保留了1段固定的处理时间T,也就是说,每轮选址询问的最后一个目标的应答到达时间trn不能够占用该段保留处理时间。1个选址询问的时序编排例子见图6。
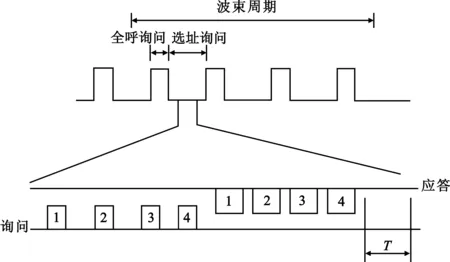
图6 S模式选址询问时序安排示例
5 结束语
本文提出了一种空管二次雷达S模式询问机捕获和监视空中S模式目标的工程实现方案,并在新研制的S模式二次雷达询问机中得到应用。区别于以往国内在空管S模式询问机方面综述性和理论性的研究,本方案把国际民航组织的相关标准与实际系统设备的工程设计完整地结合在一起,并且经过对设备工作方式的仔细研究,巧妙地解决了S模式询问机实际工作过程中面临的一些关键问题。
S模式设备和技术在空管二次雷达、空中防撞系统以及西方体制敌我识别等领域都有广泛应用,目前欧洲很多国家已经全面启用了S模式空管系统,我国正在逐步推进S模式的应用工作,其系统和设备具有相当广阔的前景和市场。该技术领域进一步研究的重点主要是S模式数据链的实际应用以及相关的外围设备和技术。
参考文献:
[1] 黎廷璋.空中交通管制机载应答机[M].北京:国防工业出版社,1992.
LI Ting-zhang.Aircraft Transponder for Air Tranffic Control[M].Beijing:National Defense Industry Press,1992.(in Chinese)
[2] Doc9684 AN/951,Manual on the Secondary Surveillance Radar(SSR) Systems[S].
[3] Stevens Michael C. Secondary Surveillance Radar[M].Boston,London: Artech House, 1988.
[4] 兰鹏.S模式与军用敌我识别[J].电讯技术, 2006,46(3):139-143.
LAN Peng. Mode S and Military IFF[J].Telecommunication Engineering, 2006,46(3): 139-143.(in Chinese)
[5] 王洪,刘昌忠,汪学刚. 二次雷达S模式综述[J].电讯技术, 2008,48(7):113-118.
WANG Hong, LIU Chang-zhong, WANG Xue-gang. Mode S for Secondary Surveillance Radar(SSR): an Introduction and Overview[J] . Telecommunication Engineering, 2008,48(7): 113-118.(in Chinese)
猜你喜欢
中国农业信息(2021年3期)2021-11-22
航天器工程(2021年2期)2021-04-28
小学生学习指导(中年级)(2021年4期)2021-04-27
课堂内外(初中版)(2020年5期)2020-06-19
百科探秘·航空航天(2018年11期)2018-11-29
电子制作(2017年13期)2017-12-15
电子制作(2017年23期)2017-02-02
电子制作(2016年15期)2017-01-15
中学生数理化·中考版(2015年10期)2015-09-10
遥测遥控(2015年5期)2015-04-23
