
无人机机载电子电气设备检测系统设计
2010-09-26 01:59:26朱安石邱金刚蔚建斌
无线电工程 2010年11期
朱安石,路 平,邱金刚,蔚建斌
(军械工程学院,河北石家庄050003)
0 引言
无人机是一种动力驱动、无人驾驶的航空器。由于其体积小、重量轻、隐蔽性好和零伤亡等特点,在军事上的用途越来越广泛。随着科学技术的日新月异,无人机也在向着智能化、用途多元化不断发展。
无人机系统是一种不同学科、不同专业综合在一起的复杂系统。主要由任务设备分系统、指挥控制分系统和航空电子分系统等组成。其中航空电子分系统是无人机系统的核心,主要由机载计算机、测量设备、伺服设备和供电设备等组成[1]。文中针对航空电子分系统中的电子电气设备进行研究,提出了一种检测系统设计方案。由于电子电气设备的可靠性是无人机飞行安全的重要保证,设计目的在于设计出一套智能化、自动化程度高的测试设备,以满足和提高无人机的智能检测和诊断水平。
1 检测系统总体设计
1.1 电子电气设备组成及功能
机载电子电气设备是无人机系统的重要组成部分,在无人机的飞行控制中起到非常重要的作用,主要包括测量设备、伺服设备和供电设备3个部分。
测量设备主要由陀螺和传感器组成,其功能是完成无人机飞行过程中重要参数(如飞机姿态角、飞行航向角等)的实时采集,反馈给飞控计算机和地面控制系统。伺服设备主要由包括升降舵机、副翼舵机和方向舵机在内的各种舵机组成,是飞行控制系统的执行机构。主要功能是:根据飞控机的指令,按规定的静态和动态的要求,实现对无人机的飞行控制。供电设备主要由交流发电机、直流稳压电源和逆变器等组成,其功能是为无人机全系统供电,以保障整个系统正常工作。
1.2 检测系统组成及原理
文中设计的检测系统主要包括3个部分:①支持PC104总线的主控计算机;②具有AD/DA转换功能及可编程数字IO功能的通用性模块;③由信号调理电路、驱动变换电路等组成的自研调理模块[2]。其中通用性模块支持PC104总线技术,能够直接通过插拔与主控计算机连接,自研调理板插在母版上,通用性模块通过排线与母版相连。系统检测原理框图如图1所示。

图1 系统检测原理
2 系统硬件设计
2.1 主控计算机
主控计算机采用嵌入式工业主板PC104/SD-840。该款主板集成了低功耗的AMD GEODE-LX PROCESSOR功能的CPU。板上具有CRT/LCD/LVDS显示接口,支持4个串口、4个USB口、1个并口、在板DOM、1个小硬盘接口,可支持2个硬盘驱动器,1个10/100M自适应网络接口,同时提供扩充用的标准PC/104接口。考虑到携带方便,检测系统采用了640×480分辨率的液晶触摸屏,并且将4个USB端口引到后面板,使得系统既可以用鼠标和键盘操作,也可以用触摸屏操作。由于CF卡容量有限,所以操作系统采用简装版的Windows2000,并且在该操作系统中安装Microsoft Visual C++,为软件调试、运行提供环境。由于PC104/SD-840体积小巧,功能和稳定性很强,并且工作温度范围较宽,能够满足复杂环境下的检测需求,所以设计中选用该款主板作为主控计算机。
2.2 通用性模块
通用性模块主要包括AD板和DA板。AD板采用PC104总线数据采集板SD161P,SD161P是一块PC104总线的多功能数据采集板,适用于工业现场、实验室和嵌入式设备等多种场合,具有16路A/D转换通道、1路D/A通道和24路可编程开关量输入输出,也可根据用户需要选配功能,节约工程成本。A/D转换通道输入信号范围是:0~10 V、-5~+5 V和-10~+10 V,3种范围通过跳线可选,根据无人机信号特点和检测系统需要,设计中选用了-5~+5 V。此外,12 BIT的输入精度和24路可编程开关量输入输出能够满足测试系统需求。AD板的主要作用是将测量设备的电压信号(如角速率陀螺的俯仰角速率信号)、伺服设备的舵偏角反馈信号(如左副翼舵偏角信号)以及3路电源电压等信号采集回来,为主控计算机的处理提供依据。
DA板型号为SD-1824,具有8路DA通道,建立时间为10 μ s,DA转换分辨率为12位,电压范围为0~5 V、0~10 V、-5~+5 V和-10~+10 V可选,文中选用-5~+5 V,此外,该板卡还有电平方式为TTL的开关量,有8路输入通道数和8路输出通道数,工作温度为温度范围为-40~70℃,能够满足宽温的需求。由于AD板的开关量有限,所以DA板的8路输入和8路输出开关量也被应用于电路,其主要功能是:由主控计算机模拟飞控机的指令,向对应的飞机电缆发送开关指令,舵机会根据指令做出相应的动作。
值得注意的是,在使用AD板和DA之前,首先要为二者分别设置不同的基地址,以免冲突。板卡在使用时要要设置启动方式,启动方式分为软件启动、定时启动和外触发启动3种,文中使用软件启动。使用板卡之前应软件开启板卡,退出程序前应该关闭设备。
2.3 自研调理模块
测试过程中,要不断地有信号在主控计算机和测试设备之间交互,在此过程中有的信号(如倾斜角速率、偏航角速率和油量等信号)可以不经过变换直接进入数据采集板后送主控计算机,但是为了节省AD通道的使用,文中使用了多路模拟选通开关CD4051芯片。而有的信号(如3路供电电源信号)会大于AD板的输入电压允许范围-5~+5 V,因此,要将信号进行调理,以保护AD通道不被损坏,文中采用电位器将3路供电电源信号分别分压后给CD4051芯片,然后送AD转换通道。
主控计算机模拟开关指令时,通过DA板输出TTL高电平,但是TTL电平不能满足停车、开伞和延时等开关量信号的需求,所以要对TTL信号进行驱动变换。文中采用的方法是:首先DA板输出TTL电平,送MC1413P芯片,然后经过光耦隔离芯片,最终将模拟的开光量信号送给对应的整机电缆。
缸温的检测采用恒流源技术,根据铂电阻阻值在一定温度范围内随温度线性变化的原理测量发动机气缸头温度。文中设计了恒流源发生电路,用以模拟飞控机中恒流源,给铂电阻供电,然后通过AD通道将电阻两端的电压信号读取给主控计算机。
发动机转速的测量原理是通过检测发动机产生交流电的频率来测量发动机的转速,具体的测量方法是:将发电机产生的交流电经过电阻限流,然后进入光耦隔离器件,将输出的脉冲送入计数器,对其计数,从而可以计算出发动机转速。
垂直陀螺的供电需要±8 V电压,但是测试系统的供电电压为±13 V,所以需要将±13 V转换为±8 V电压,具体的实现方法是:利用TL431,通过设置RA和RK端口之间的阻值的比值调节输出端电压,文中采用电位器实现,使得电压的调节比较灵活。
3 系统软件设计
文中设计的检测系统在Windows2000操作系统下运行,应用Microsoft Visual C++6.0作为开发环境[4],编程语言采用面向对象的C++。
检测系统的工作流程描述如下:首先开机进行系统自检,启动程序后,进行界面初始化,然后进行测试模式选择,测试模式包括自动测试和交互测试2个部分,自动测试能够无需人工干预自动完成测试功能,交互测试可以提供交互界面逐步完成测试功能,接着选择要测试的项目进行测试,最后将测试结果保存在数据库中[5],系统主程序流程如图2所示。

图2 主程序流程
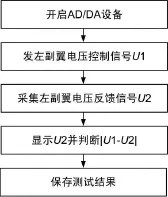
图3 子程序流程
检测系统的测试内容主要包括测量设备检测、伺服设备检测和供电设备检测3个部分。以伺服设备中的左副翼舵机检测为例,介绍系统的检测过程。首先,测试主机的DA板向左副翼舵机发送电压控制信号 U1,左副翼动作,用测试主机的一路AD采集左副翼舵机的反馈信号 U2,计算 Δ U=|U1-U2|,如 果 Δ U 在误差允许范围内,则认为舵机工作正常,否则舵机工作异常,子程序流程图如图3所示。
检测系统界面显示的内容主要包括飞机的状态参数、发动机的状态参数、机载供电电源的参数、各个舵机反馈电压参数以及开关量信号的状态,检测完毕后,系统检测结果以报表的形式呈现,最终的测试结果可以导出并保存。
4 结束语
上述设计了地面便携式检测系统的硬件部分,在硬件平台的基础上开发了地面检测系统软件,并且进行了与实际装备的联机调试,完成了对测量、伺服和供电设备的检测,经过研究与调试工作,所设计的检测系统虽满足了性能技术指标,但在实际工程应用中还存在一些不足,需要在后续研究工作中加以改进和完善。
[1]祝小平.无人机设计手册[M].北京:国防工业出版社,2007:1-5.
[2]杨送非,廖 枫,罗 晨,等.基于PC104总线的航电模拟器设计与实现[J].系统仿真学报.2009,21(15):4661-4663.
[3]何立民.单片机应用系统设计系统配置与接口技术[M].北京:北京航空航天大学出版社,1998:254-305.
[4]孙 鑫,余安萍.V C++深入详解[M].北京:电子工业出版社,2006:219-307.
[5]张 扬,陈鲁汉,宁 波.基于1553B总线的航空电子设备的检测系统设计[J].电子测量技术,2008,31(4):110-112.
[6]LIPPMAN S B,LAJOIE J,MOO B E.C++PRIME中文版[M].北京:人民邮电出版社,2010:367-400.
猜你喜欢
小学科学(学生版)(2021年7期)2021-07-28 06:44:42
中国电业与能源(2020年7期)2020-08-18 11:08:12
科技传播(2019年22期)2020-01-14 03:06:34
自动化学报(2019年6期)2019-07-23 01:18:36
电子制作(2018年1期)2018-04-04 01:48:14
消费导刊(2017年20期)2018-01-03 06:26:40
制造业自动化(2017年2期)2017-03-20 14:26:08
舰船科学技术(2015年8期)2015-02-27 15:38:46
风能(2015年5期)2015-02-27 10:14:47
风能(2015年4期)2015-02-27 10:14:32
