RMII模式以太网PHY芯片DP83848C的应用
2010-09-25 02:58宋鑫郭勇谢兴红
单片机与嵌入式系统应用 2010年8期
宋鑫,郭勇,谢兴红
(成都理工大学信息工程学院,成都 610059)
引 言
DP83848C是美国国家半导体公司生产的一款鲁棒性好、功能全、功耗低的10/100 Mbps单路物理层(PHY)器件。它支持MII(介质无关接口)和RMII(精简的介质无关接口),使设计更简单灵活;同时,支持10BASE-T和100BASE-TX以太网外设,对其他标准以太网解决方案有良好的兼容性和通用性。
MII(Medium Independent Interface)是IEEE802.3u规定的一种介质无关接口,主要作用是连接介质访问控制层(MAC)子层与物理层(PHY)之间的标准以太网接口,负责MAC和PHY之间的通信。由于MII需要多达16根信号线,由此产生的I/O口需求及功耗较大,有必要对MII引脚数进行简化,因此提出了RMII(Reduced Medium Independent Interface,精简的介质无关接口),即简化了的MII。
1 硬件设计
1.1 电路设计
DP83848C的收发线路各是一对差分线,经过变比为1∶1的以太网变压器后与网线相连。以太网变压器的主要作用是阻抗匹配、信号整形、网络隔离,以及滤除网络和设备双方面的噪音。典型应用如图1所示。

图1 DP83848C典型应用
图2是DP83848C与MAC的连接电路。其中,X1为50 MHz的有源振荡器。
1.2 PCB布局布线
布局方面,精度为1%的49.9 Ω电阻和100 nF的去耦电容应靠近PHY器件放置,并通过最短的路径到电源。如图3所示,两对差分信号(TD和RD)应平行走线,避免短截,且尽量保证长度匹配,这样可以避免共模噪声和EMI辐射。理想情况下,信号线上不应有交叉或者通孔,通孔会造成阻抗的非连续性,所以应将其数目降到最低;同时,差分线应尽可能走在一面,且不应将信号线跨越分割的平面,如图4所示。信号跨越一个分割的平面会造成无法预测的回路电流,极可能导致信号质量恶化并产生EMI问题。注意,图3和图4中,阴影部分为错误方法。

图2 DP83848C与MAC的连接电路

图3 差分信号对和短截

图4 差分信号对层间跨越
2 RMII模式描述
RMII模式在保持物理层器件现有特性的前提下减少了PHY的连接引脚。
RMII由参考时钟REF_CLK、发送使能TX_EN、发送数据 TXD[1∶0]、接收数据 RXD[1∶0] 、载波侦听/接收数据有效CRS_DV和接收错误 RX_ER(可选信号)组成。在此基础上,DP83848C还增加了RX_DV接收数据有效信号。
2.1 REF_CLK——参考时钟
REF_CLK是一个连续时钟,可以为CRS_DV、RXD[1∶0] 、TX_EN 、TXD[1∶0] 、RX_DV 和 RX_ER 提供时序参考。REF_CLK由MAC层或外部时钟源源提供。REF_CLK频率应为50 MHz±50×10-6,占空比介于35%和65%之间。在RMII模式下,数据以50 M Hz的时钟频率一次传送2位。因此,RMII模式需要一个50 MHz有源振荡器(而不是晶振)连接到器件的X1脚。
2.2 TX_EN——发送使能
TX_EN表示MAC层正在将要传输的双位数据放到TXD[1∶0]上。TX_EN应被前导符的首个半字节同步确认,且在所有待传双位信号载入过程中都保持确认。跟随一帧数据的末2位之后的首个REF_CLK上升沿之前,MAC需对TX_EN取反。TX_EN的变化相对于REF_CLK是同步的。
2.3 TXD[1∶0]——发送数据
TXD[1∶0]的变换相对于REF_CLK是同步的。TX_EN有效后,PHY以TXD[1∶0]作为发送端。
在10 Mbps模式下,由于REF_CLK的频率是在10 Mbps模式中数据速率的10倍,因此TXD[1∶0]上的值必须在10个脉冲期间保持稳定,确保DP83848C能够每隔10个周期进行采样。发送时序如图5所示,发送延时情况如表1所列。其中,PMD为物理介质关联层(physical media dependent)接口。
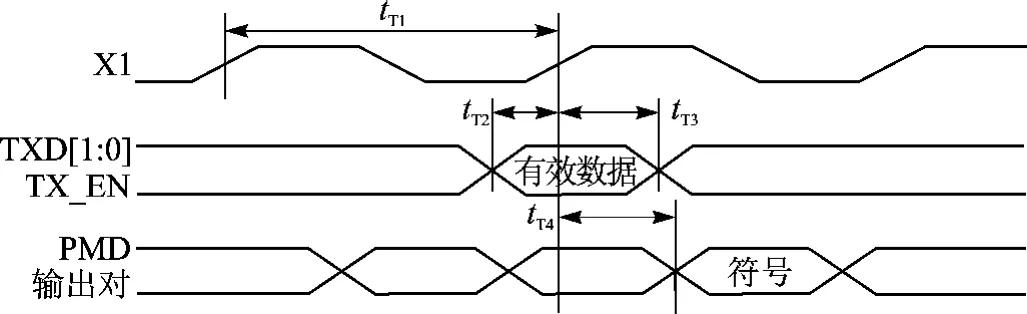
图5 RMII发送时序
2.4 RXD[1∶0]——接收数据
RXD[1∶0]转换是与REF_CLK同步的。在CRS_DV有效后的每个时钟周期里,RXD[1∶0]接收DP83848C的两位恢复数据。在某些情况下(如数据恢复前或发生错误),则接收到的是RXD[1∶0]的预确定值而不是恢复数据。CRS_DV 解除确认后,RXD[1∶0]为“00”,表示进入空闲状态。CRS_DV确认后,在产生正确的接收解码之前,DP83848C 将保证 RXD[1∶0]=“00”。

表1 数据发送时的延时情况
DP83848C提供的恢复数据总是半字节或成对双位信号的形式,这对于由前导符开始的所有数据值都成立。因为CRS_DV是异步确认的,不能假设先于前导符的“00”数据会是双位信号形式。
100 Mbps模式下,在CRS_DV确认之后的正常接收过程中,RXD[1∶0]将会保持“00”,直到接收器检测到正确的起始串分界符 (Start Stream Delimiter,SSD)。一旦检测到SSD,DP83848C将会驱动前导符(“01”),后面紧跟着起始帧分界符(Start of Frame Delimiter,SFD)(“01”“01”“01”“11”)。MAC 应该开始SFD之后的数据。如果检测到接收错误,在载波活动结束前,RXD[1∶0]将会替换为接收字符串“01”。而由于帧中剩余数据被替换,MAC的奇偶校验将会拒绝错误的信息包。如果检测到错误的载波(坏的SSD),RXD[1∶0]将会替换为“10”,直到接收事件结束。这种情况下,RXD[1∶0]将会从“00”变为“10”,而无需标明前导符(“01”)。
10 Mbps模式下,CRS_DV确认后,RXD[1∶0]将会一直保持“00”,直到DP83848C有恢复脉冲并能对接收数据进行解码为止。当存在有效接收数据时,RXD[1∶0]以“01”为前导符接收恢复的数据值。因为 REF_CLK频率是10 Mbps模式下数据速率的10倍,MAC对RXD[1∶0]上的值每隔10个周期采样一次。接收时序如图6所示,接收延时情况如表2所列。
2.5 RX_DV——接收数据有效
尽管RMII并不要求,DP83848C还是提供了一个RX_DV信号。RX_DV是没有结合CRS的接收数据有效信号(Receive Data Valid)。第一个正确的恢复数据(前导符)或伪载波检测到来时,RX_DV被确认,在恢复数据的末两位传送之后解除确认。通过使用该信号,全双工MAC不必再从CRS_DV信号中恢复RX_DV信号。
2.6 CRS_DV——载波侦听/接收数据有效
当接收介质处于非空闲状态时,由PHY来确认CRS_DV。在载波检测中,CRS_DV依据与工作模式相关的标准异步确认。10BASE-T模式下,静噪通过时发生该事件。在100BASE-TX模式,当10位中检测到2个非相邻的零值时,发生该事件。
在RMII规范(1.2版)中提到,载波丢失将导致与REF_CLK周期同步的CRS_DV解除确认,这在RXD[1∶0]半字节的首两位出现(即CRS_DV仅在半字节边界解除确认)。在CRS_DV首次解除确认后,如果DP83848C还有数据位要加在 RXD[1∶0]上,则在 REF_CLK周期中,DP83848C应在每半个字节的第2个双位上确认CRS_DV,并在一个半字节的第1个双位解除确认。这样,从半字节边界开始,到CRS(载波侦听/接收信号)在RX_DV前结束时,CRS_DV以25 MHz(100 Mbps模式)或2.5 MHz(10 Mbps模式)的频率翻转(假设当载波事件结束时DP83848C还有待传送的数据位)。
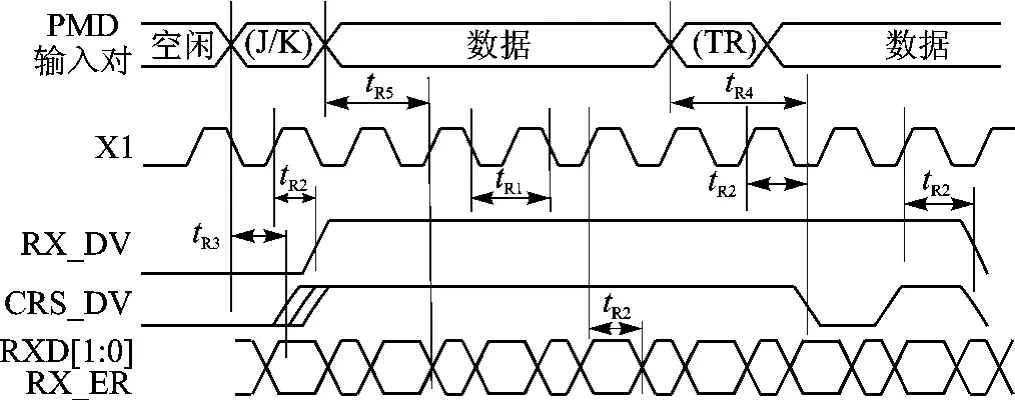
图6 RMII接收时序
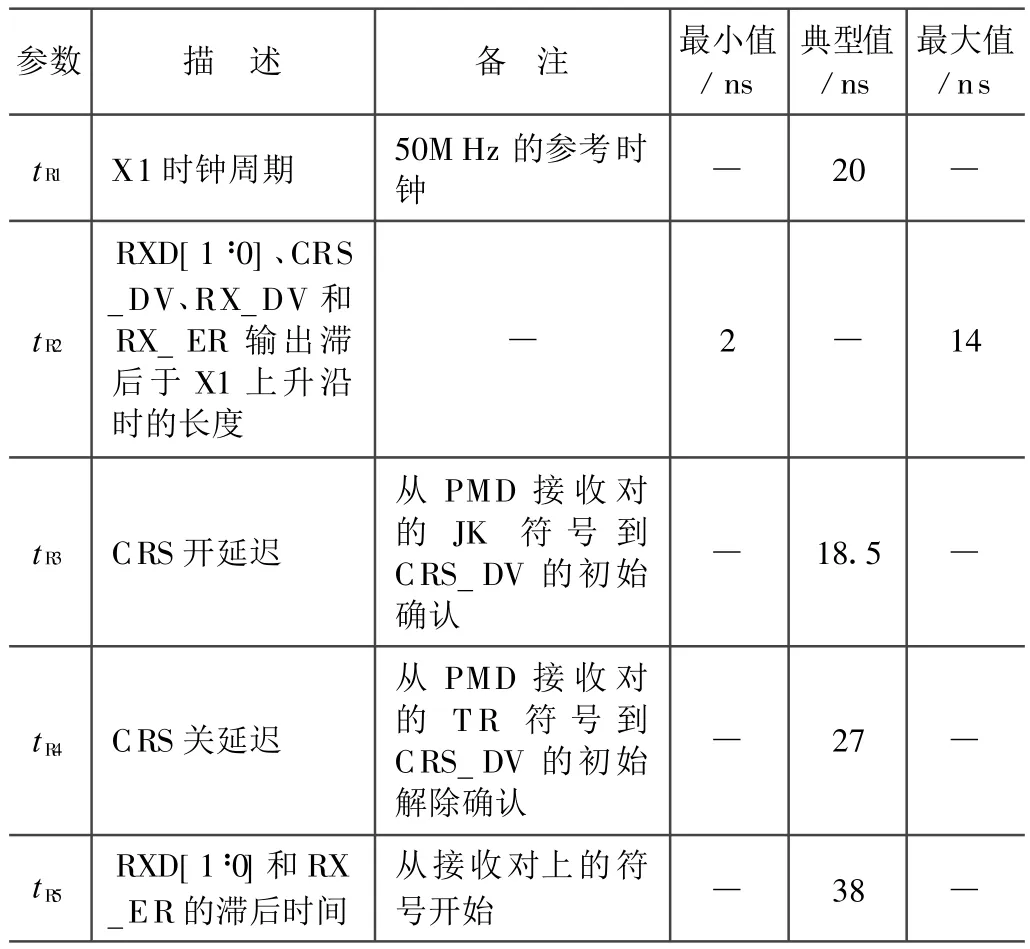
表2 数据接收时的延时情况
通过编程DP83848C能够与RMII规范(1.0版)很好地兼容。在该模式下,CRS_DV将会异步地与CRS进行确认,但是要等传送完最后的数据时才会解除确认,CRS_DV在数据包的末端不会被翻转。该模式虽然不能对来自CRS_DV的CRS信号进行精确的恢复,但是却可以使MAC层的设计更简单。
在出错的载波活动时间中,CRS_DV保持确认。一旦确认CRS_DV,则可以认为在RXD[1∶0]上的数据是有效的。然而,由于CRS_DV的确认相对于 REF_CLK是异步的,因而在正确解码接收信号之前,RXD[1∶0]上的数据应为“00”。
2.7 RX_ER——接收错误
遵照IEEE802.3标准的规定,DP83848C提供一个RX_ER输出端。RX_ER可以维持一个或更多的REF_CLK周期,来标识一个在当前PHY到帧的传输过程中曾出现的错误(MAC子层不一定能检测到,但PHY可以检测到的编码错误或其他错误)。RX_ER的变化相对于REF_CLK是同步的。
由于DP83848C是通过以固定数据代替原来数据的方式干扰到RXD[1∶0],所以MAC不需要 RX_ER,而只需CRC校验(即奇偶校验)就可以检测到错误。
2.8 冲突检测
RMII不向MAC提供冲突标志。对于半双工操作,MAC必须从CRS_DV和TX_EN信号中产生它自己的冲突检测。为了实现这一点MAC必须从CRS_DV信号中恢复CRS信号,并和TX_EN进行逻辑与。注意,不能直接使用CRS_DV,因为CRS_DV可能在帧的末端触发以标志CRS解除确认。
3 RMII模式配置
DP83848C的RMII模式配置包括硬件和软件两个方面。
3.1 硬件配置
如图2所示,DP83848C的X1(34)脚上提供50 M Hz CMOS电平的振荡信号。在上电和复位时,强制DP83848C进入RMII模式。方法是通过在RX_DV/MII_MODE(39脚)接入一个上拉电阻。
3.2 软件配置


PHY的软件初始化流程如图7所示。
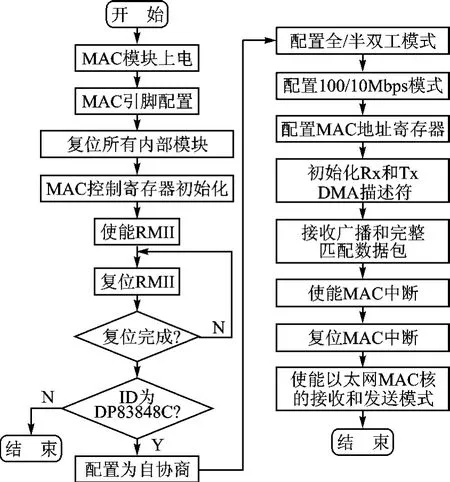
图7 PHY软件初始化流程
结 语
DP83848C配合RMII标准接口提供了一种连接方案,可以减少MAC至PHY接口所需要的引脚数目。该方案使得设计工程师在保持IEEE802.3规范中所有特性的同时,降低系统设计成本。正因为如此,DP83848C能够更好地适应工业控制和工厂自动化,以及通用嵌入式系统等应用场合。
[1]RMII Consortium.RMII Specification.Revision 1.2,1998-03.
[2]吴俊杰,吴建辉.以太网MAC控制器的MII接口转 RM II接口的实现[J].电子器件,2008(2):712-715.
[3]毛德操,胡希明.嵌入式系统[M].杭州:浙江大学出版社,2003.
猜你喜欢
销售与市场(营销版)(2021年10期)2021-11-21
福建基础教育研究(2020年1期)2020-05-28
销售与市场(营销版)(2019年6期)2019-06-21
西安邮电大学学报(2018年6期)2019-01-21
网络安全与数据管理(2018年8期)2018-08-27
网络安全技术与应用(2017年9期)2017-09-20
广东通信技术(2016年9期)2016-10-25
单片机与嵌入式系统应用(2016年8期)2016-09-15
吉林大学学报(信息科学版)(2013年4期)2013-10-15
微处理机(2010年3期)2010-06-13