
基于D S P无速度传感器的感应电动机控制研究
2010-09-21 02:43韩旻王忠庆
电子测试 2010年1期
韩旻 ,王忠庆
(中北大学,山西省 太原 030051)
0 引言
传统的交流感应电动机调速系统通常采用双闭环PI 控制,而交流感应电动机是一个多变量、非线性、强耦合的控制对象,PI控制从本质上说是一种线性控制,因此传统PI 控制无法从根本上解决静态和动态性能之间、跟踪设定值与抑制扰动能力之间存在的矛盾。交流感应电机的无速度传感器高动态性能控制,是为了实现与有速度传感器的矢量控制相当的转矩和速度性能的方案,被用于无法设置速度传感器的设备或新一代高性能通用变频器之中。本文将以TMS320F2812为核心,采用矢量控制策略,利用无速度传感器、空间矢量脉宽调制( SVPWM)等技术,设计一个全数字化的电机控制系统。
1 感应电动机的矢量控制
矢量控制是目前交流感应电动机常见的控制技术,在特定的参考坐标系内,电磁转矩方程类似于直流电动机的转矩方程,这样使得控制更加方便,转子空间矢量的计算和正交坐标变换都需要较大的运算量,若采用高速TMS320F2812信号处理器,其最高运算速度可以达到150MHz,精度达到32位,主要完成测量电动机变量;计算转子磁通空间矢量的幅值和位置角度;采用PARK变换将定子电流变换到d-q坐标系;采用PARK逆变换将d-q坐标变量变换成定子电压空间矢量;使得空间矢量模块产生三相电压输出。感应电动机无速度传感器直接磁场定向控制如图1所示。

图1 感应电动机无速度传感器直接磁场定向控制框图
2 感应电机矢量控制系统的硬件设计
硬件电路采用TI公司的TMS320F2812作为控制器,系统具有为电机控制应用提供单片解决方案所必要的外围设备,使得简单而优化的外围设备单元与高性能的内核一起实现感应电动机直接转矩控制系统,控制板可通过JTAG接口或者RS232串口与PC相连,控制电路包括系统的控制电路包括电流检测、转速检测、PWM 脉冲隔离驱动和系统故障保护几部分组成。整个系统的硬件框图如图2所示。

图2 异步电机直接转接转矩控制系统硬件框图
2.1 电流、电压检测回路
检测回路包括直流母线电压、定子电流和转速检测等电路。电压检测选用LV25-P电压互感器,电流检测选用SY-20电流互感器。转速检测选用欧姆龙OVW2-2048-2MD旋转编码器。用于和辨识出来的转速进行比较。A/D转换器选用AD7862,TMS320F2812内带有2个12位模/数转换器,单次转换时间为80ns。因此需要2 个通道并行转换一次完成信号的传输;由TMS320F2812片内AD的输入范围为0~3V,因此,应对信号进行衰减和电平平移,在AD采样之前,还应进行滤波,去除高频干扰信号对采样造成的影响,必须将霍尔传感器输出的小电流信号转换为电压信号,再经过放大滤波后送入ADC。其中电压、电流检测经A/D转换送入DSP控制板。其中检测的电压电流信号一方面用于矢量控制的运算,另一方面用于过压、欠压及过流保护。转速给定信号通过电位器调节实现,电动机转速检测的正确性和精度也将直接影响系统的控制精度和稳定性。
2.2 控制回路设计
控制回路是系统的核心,选用以TMS320F2812芯片为核心的DSP控制板。主要负责电压、电流、转速等信号的采集,并根据矢量控制算法发出SVPWM信号,对母线电压进行采样,母线电压经过简单的电阻分压进行采样,采样过后该信号经光耦隔离HCPL7800与控制电路隔离,从而将直流母线电压转换成三相交流电压直接送到DSP去驱动感应电机,如图3所示。

图3 母线电压检测电路
3 系统软件设计
控制软件由初始化程序和运行程序组成,其软件流程图如图4所示,系统主要实现DSP软件的初始化包括锁相环PLL、I/O、A/D、外设等模块的初始化,只需在系统上电时执行,当开中断设置以后,相应的中断服务程序就执行, 整个矢量控制算法都在中断子程序中完成,中断由电流及转速检测信号处理、坐标变换、磁通估计、开环转速估计、SVPWM信号产生等功能模块构成,其调用的频率与PWM 的输出频率一致。
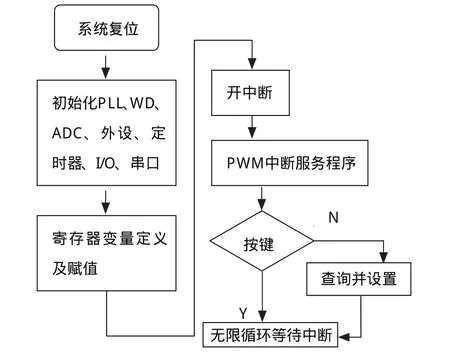
图4 磁场定向控制主程序流程图
4 无速度传感器矢量控制系统仿真结果
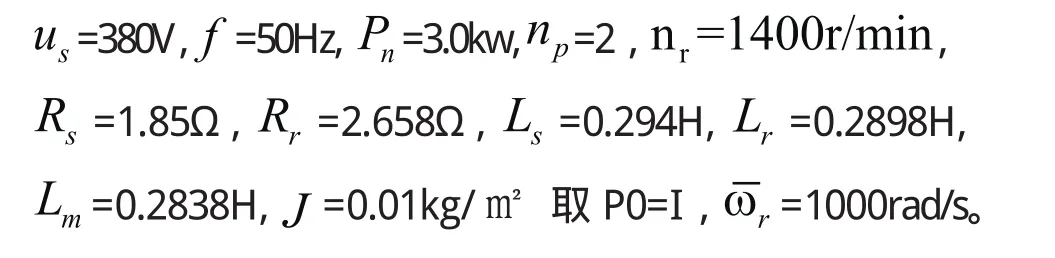
仿真采用三相鼠笼型感应电机,电机参数如下:
采用前面的算法,可以得到方程组的可行解:
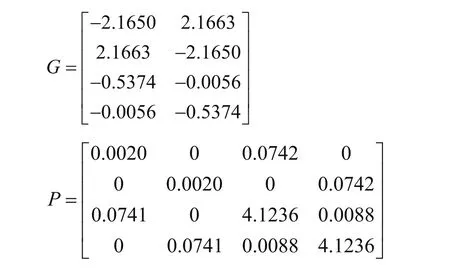
图5 是给定速度200r/min,给定负载5N·m时的定子磁链轨迹。可以看出,满足给定的磁链值,系统转子磁链轨迹圆形度较好,这就减少了系统运行时的磁通谐波。
在给定转速为200~-200)r/min,转矩发生阶跃变化[10-(-10)-10]N·m情况,用来研究系统运行状态的稳定性,图6为定子电阻斜坡上升时的仿真结果。由图可见,系统正转时稳定运行且稳态精度较好,曲线光滑,估计转速曲线能够跟随实际速度曲线,使得速度估计误差很小,并能减小定子电阻变化对系统性能的影响。
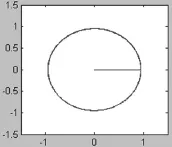
图5 定子磁链轨迹

图6 转速给定的速度曲线与误差估计
5 结束语
本文是基于高性能数字信号处理器TMS320F2812的感应电机矢量控制系统的系统设计,从感应电机的基本原理出发,提出的无速度传感器矢量控制方案设计,控制精度高,具有良好的动静态性能。实时完成变换控制策略的坐标变换、转速控制、电流检测、磁链(磁通)估算、PWM信号生成,对主电路相关器件的选择,并且主要分析电流、电压检测回路以及控制回路。由于电机参数的变化特别是定子电阻和转子电阻的变化会直接影响到系统的动静态特性,同时采用MATLAB仿真来实时观察系统的稳定性,该系统收敛性能好,能较好地估计电机的磁链及转速,具有良好的稳态辨识特性。
[1]王树东,李海涛. 基于DSP的SVPWM感应电动机调速系统实现[J]. 微电机,2008, 41(4):52-58.
[2]杨耕,陈伯时. 交流感应电动机无速度传感器的高动态性能控制方法综述[J].电气传动,2001(3):3-8.
[3]TIZIANOB.Method and Device for the Constant Tension Feed and Take up of a Yarn Fed to a Textile Machine:US ,2005 /0224619 A1[P]. 2005-10-13.
[4]赵文祥,刘国海,吉敬华等. 基于DSP 的全数字矢量控制SVPWM变频调速系统[J].电机与控制学报,2004,34 (2):145-166.
[5]苏奎峰,蔡昭权,吕强,张永谦.TMS320X281X DSP应用系统设计[M].北京:航空航天大学出版社,2008.
[6]李艳,何勇,高中秋.一种新的交流感应电动机控制算法[J].东华大学学报,2009, 35(4):201-210.
[7]王蒙生,郝学光,李鸿恩.浅析感应电动机SPWM控制技术[J].中国电力教育, 2009年管理论丛与技术研究专刊: 196-199.
[8]张平化.三相变频调速感应电动机的矢量控制方法研究[D]. 哈尔滨:哈尔滨工业大学,2005:43-45.
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
电机与控制应用(2015年10期)2015-03-01
