
发动机连杆机构的运动仿真
2010-09-06 10:57:46广东机电职业技术学院陈力捷
河南科技 2010年17期
广东机电职业技术学院 陈力捷
发动机连杆机构的运动仿真
广东机电职业技术学院 陈力捷

发动机的连杆机构实际上是曲柄滑块机构,它是四杆机构的一种形式。在本文中,笔者以曲柄滑块机构为例,在Matlab/Simulink环境中建立一个发动机连杆机构的动态仿真系统,并对其进行了运动仿真和分析。
一、曲柄滑块机构分析
曲柄滑块机构如图1所示。

设A固定基架坐标为(0,0,0),则A=(0,0,0)。同时设杆AB、杆BC的长度分别为r2、r3,偏置量为r4,另外,如图1所示,A点与C点的垂直距离为r1。对于曲柄连杆机构,其极位夹角为θ;活塞行程为H;行程速比系数为k;最小传动角为γmin。根据定义得到以下各式:

设H=100mm,K=1.25,γmin≥40°。根据上面各式求解可得r2= 48.549 1,r3=85.740 4,r4=16.362 2。根据所求各杆长度及偏置量可求得AB、BC杆端点和重心的坐标(这里为了研究方便,假设AB、BC杆的质量均匀分布)。
如图1所示,设α1=45°,对于杆AB而言,以A端基架作为杆上各点参照,则A端坐标为(0,0,0),重心的坐标为(-17.1621 1,标为(-16.362 2,116.565 7,0),BC杆重心的坐标为(24.343 2,74.44495,0)。
二、建立仿真模型及设置参数
利用Matlab的simulink/simMechanics各模块建立仿真模型,如图2所示。

基架、杆AB、杆BC、活塞之间都通过铰链连接,活塞与支架之间则是一对移动副。仿真模型建立之后,双击各模块打开属性框,分别对应输入各构件端点及重心坐标,如图3所示。

为得到仿真效果,还要设置Env属性中的Visualization(可视化),双击open configuration parameter,选择animate machine during simulation(在仿真过程中绘制机构)选项,最终的仿真效果如图4所示。
三、仿真分析
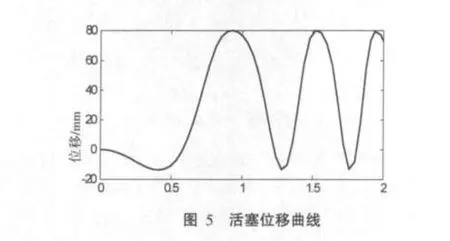
假设曲柄为原动件,设其初始角速度为0,加速度为10rad/s2,运行仿真,可得到活塞的位移、速度、加速度分别如图5、图6、图7所示。从图5中可以看出活塞的运动行程为100mm。

四、结论
建立发动机曲柄连杆机构的数学模型,在matlab的环境下,利用simulink/simMechanics模块,建立动态仿真系统并进行分析。相比于传统的图解法,这种方法不需要进行一些高级语言编程就能很直观地观察到某机构的运动状况,简单高效,另外还可以修改各构件的仿真参数,得到不同类型的运动系统,大大减少了机械设计的工作量。

猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:32
中国信息化(2022年5期)2022-06-13 11:12:49
机械工程师(2021年4期)2021-04-19 07:27:56
设备管理与维修(2019年22期)2019-12-19 01:30:12
机械研究与应用(2018年5期)2018-11-05 05:59:38
北京航空航天大学学报(2016年6期)2016-11-16 01:50:49
中国塑料(2015年9期)2015-10-14 01:12:35
河南科技(2015年2期)2015-02-27 14:20:28
河南科技(2014年6期)2014-02-27 14:06:47
河南科技(2014年3期)2014-02-27 14:05:55
