
小型反射镜挠性支撑方案的研究
2010-08-16 02:11:46马长征
长春工业大学学报 2010年5期
薛 军, 马长征
(中国人民解放军装甲兵技术学院机械工程系,吉林长春 130017)
0 引 言
小型空间遥感器由于其体积小、重量轻、安装简单的特点,在目前空间光学观测仪器中,仍扮演重要的角色,尤其是采用较大视场的小型空间遥感器,更具有广阔的发展前途。小型空间遥感器为了实现大视场,需要扩大反射镜的通光孔径,如采用推扫的工作模式,小型长条反射镜是很好的选择。一方面它可以满足大市场的要求,另一方面可以实现重量较轻、体积较小的特点。光学反射镜成像表面的面形精度(PV值和RMS值)是影响空间光学遥感器光学系统成像质量的关键因素(对于成像光学系统要求反射镜面形精度PV≤63.2 nm,RMS≤12 nm)。在重力环境下反射镜容易受重力作用导致变形,而温度变化的环境下,镜面也会发生变形,这些变形会导致成像质量下降。如何使反射镜在力学环境工况下满足面形设计指标要求的同时,在空间热环境工况下也能达到成像要求的面形精度,就需要对反射镜的支撑结构进行合理的设计。理论和实践表明,在温度变化环境下,如果反射镜能够自由膨胀或收缩,反射面上各点的球面性或平面性不会产生破坏性变化,即各点的球半径矢量变化趋于一致,此时反射镜面形精度不会有较大的变化。在支撑结构中增加结构的柔性,反射镜在温度变化环境下具有良好的可变形性,此时反射镜就具有良好的热尺寸稳定性。但是,如果结构的柔性过大,反射镜重力变形就会显著增大,而且抵抗动态载荷的能力将大大降低,所以对柔性环节的使用必须进行仔细研究[1-3]。
文中对450 mm×150 mm长条反射镜的挠性支撑进行了研究,提出了单点挠性支撑,并对具体结构进行了细致的研究。反射镜采用反应烧结SiC材料,以保证镜体自身刚度。工程分析表明,这种支撑可以很好地保证反射镜在静力学、热环境下镜面具有较高成像质量,而其支撑自身在一定的动态环境下不会破坏。
1 反射镜镜体结构设计及支撑方案的确定
对于反射镜的支撑,采用三点支撑是最合理的手段,但对于细长条反射镜,三点支撑受面积的制约难以展开,由此,450 mm×150 mm长条反射镜拟采用单点支撑。
反射镜采用单点支撑具有一定的优势:
1)在反射镜组件调试时,三点支撑或多点支撑会受支撑结构工艺误差、装调方案的影响产生一定不平衡作用力或力偶,这些都会使反射镜变形而导致一定程度的像差。而单点支撑的反射镜虽然也易受外界作用力的干扰,但由于力臂较短,对反射镜影响也相对有限。
2)单点支撑时,当环境温度变化时,支撑结构的变形相对简单(即不会由于多点支撑热变形产生互相干涉),此时反射镜受支撑结构不均匀,热应力的影响会大大降低。
单点支撑虽然具有一定的优势,但弊端也很明显。主要是由于支撑刚度的不足,在重力的作用下,容易产生变形,影响成像质量。所以在设计支撑方案时,首先必须保证镜体具有较高的结构刚度,重力变形较小,减小对结构的依赖性;其次是尽量降低重量,提高支撑结构的动态可靠性。
考察镜体结构刚度主要是针对重力沿光轴方向作用下结构的变形。利用工程分析得到反射镜结构变形优化前后的对比,如图1所示。

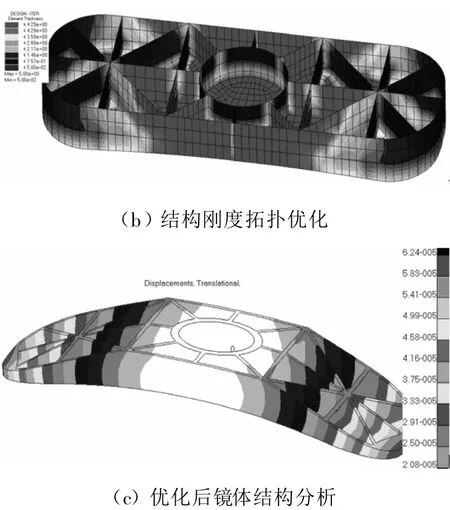
图1 反射镜结构变形优化前后的对比
图1(a)为初始的结构重力的变形,此时结构变形不能满足成像的需要。图1(b)为结构刚度的拓扑优化,优化结果表明,中心部位需要加强以调高整体刚度,对结构刚度贡献不大的部位可以去除以降低重量。图1(c)是根据优化后重新设计镜体结构的工程分析,此时结构变形满足光学成像要求。
由于镜体采用反应烧结法,根据工艺特点,可以将反射镜设计成封闭结构,这样对提高结构刚度更加有利,见表1。
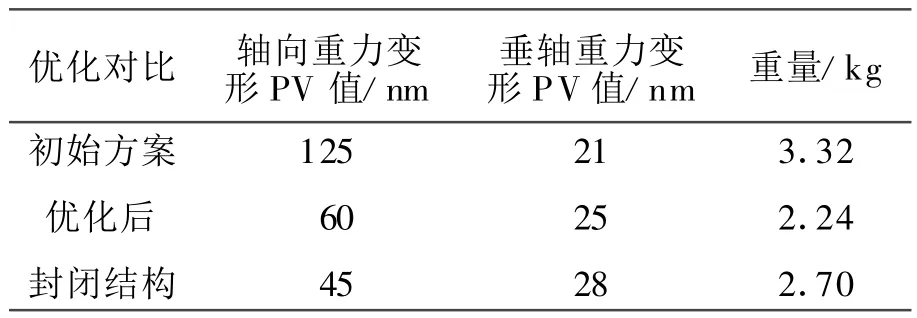
表1 反射镜镜体的优化对比
2 挠性支撑结构设计
为了使温度变化下反射镜面形精度达到使用要求,设置一定程度的柔性环节是必要的。根据细长条反射镜宽度较小的基本特点,采用中心挠性支撑。主要是通过设置中心对称的径向变形弹性薄片,以适应反射镜的热变形。反射镜挠性支撑结构如图2所示。
图2中,T型块将反射镜与弹性薄片分别连接起来,起到过渡作用,T型块必须采用与反射镜线胀系数相匹配的铟钢材料制作,弹性薄片则可以采用强度较高的钛合金材料制作。最后弹性薄片再通过过渡角板与外界固定连接,两者需要有狭缝过渡[4-8]。

图2 反射镜挠性支撑结构
当反射镜由于温度变化产生膨胀或收缩时,弹性薄板则受弯矩作用,当薄片的刚度合适时,薄片变形吸收绝大部分反射镜的变形能量,此时反射镜能够做到部分自由变形。
由于挠性环节的设置,系统的刚度将降低,系统的静态和动态稳定性降低。如果将水平的弹性薄片简化为悬臂的片弹簧,则在载荷 P的作用下,片弹簧的自由端变形公式为:

E——材料的弹性模量;
b——片宽度;
h——片厚度;
L——片长度。
当自由端的变形量为单位变形量时,此时可以求得载荷P,近似为单个水平片弹簧的刚度K。当K=1320 N/m,且3块簧片同时为水平设置时,可由公式求得最高一阶固有频率为80 Hz,式中M为反射镜的质量。由于在近似计算中,已经将薄片中心固定(薄片中心不变形),如果在整个反射镜系统中,一阶固有频率将会降低,所以,由此近似导出的一组薄片的结构数据可作为优化设计的初始条件。
3 反射镜挠性支撑结构工程分析
将支撑具体结构划分为有限元模型,进行各种静态和动态环境下结构稳定性分析。挠性支撑结构的有限元模型和反射镜挠性支撑结构系统的有限元模型分别如图3和图4所示。
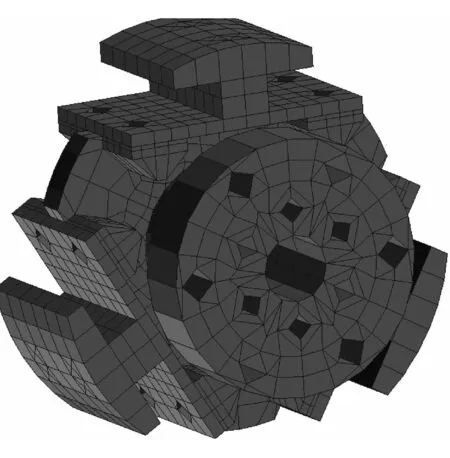
图3 挠性支撑结构有限元模型

图4 反射镜挠性支撑系统有限元模型
工程分析主要包括动态刚度分析(模态分析)、结构强度分析以及静力学分析。
通常来说,动态刚度分析主要针对整机进行模态分析,但由于理论近似计算所得的最高模态并不高,所以,还应对系统及其组件级进行模态分析,考察一阶固有模态是否会与遥感器卫星载体一阶固有模态重叠或相近。当组件级的模态与载体相近时,必须进行结构改进。另外通过模态分析,为静态结构尺寸稳定性结构优化找到薄弱环节。
结构强度分析主要是估算支撑结构抵抗低频振动能力,并通过在一定频率和振幅的振动作用下,考察反射镜镜体加速度的输出,并计算相应的放大倍率。同时,还需要计算支撑部件,尤其是弹性薄片的最大应力分布,考察抗振性安全系数。
静态分析主要包括重力环境下、温度变化环境下以及耦合环境下对反射镜成像质量的影响。
通过结构的参数优化,确定最终的几何模型。反射镜挠性支撑系统静态分析变形图如图5所示。
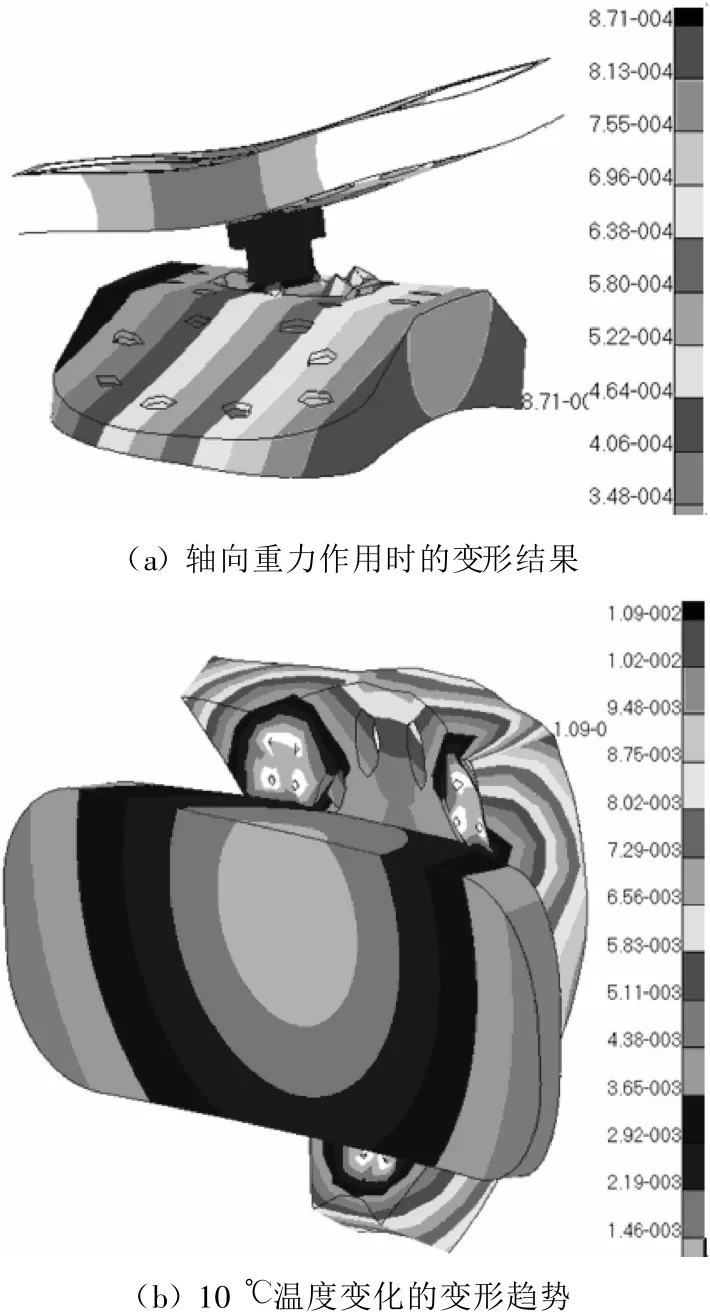
图5 反射镜挠性支撑系统静态分析变形图
在结构优化过程中,通过弹性薄板厚度进行参数优化,由此找到较为合理的方案。随着薄板厚度不断增大,此时反射镜支撑孔附近的温度变形将不能克服薄板刚度,变形必然沿轴向进行释放,从而导致反射镜曲率半径发生变化,反射镜的面形精度下降,当反射镜的面形PV值下降到60 nm,将会影响质量。
反射镜挠性支撑系统动态响应如图6所示。


图6 反射镜挠性支撑系统动态响应
取弹性薄板的厚度为2 mm,由此计算所得的反射镜重力变形符合光学成像要求,见表2。

表2 反射镜挠性支撑重力作用工程分析结果
一阶固有频率为112 Hz,见表3。
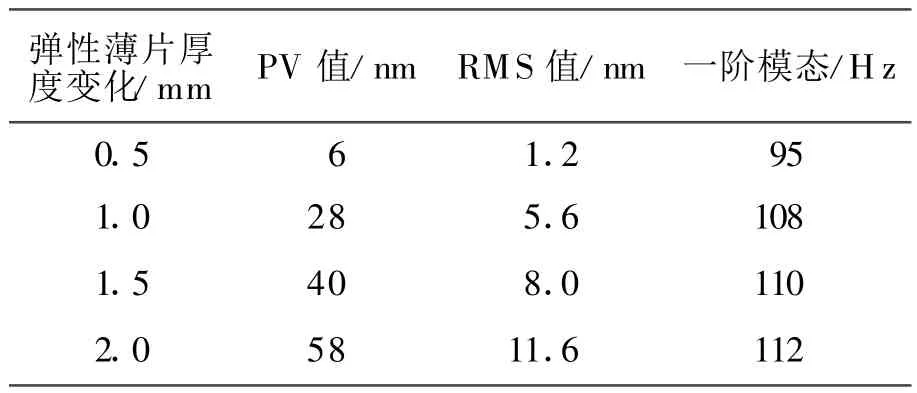
表3 挠性支撑方案10℃温度变化环境下工程分析结果

表4 动态结构强度分析输入条件
反射镜在100 Hz处最大响应为5 g,相对于机体放大1.4倍。挠性支撑结构件最大应力为17.2 MPa,远远低于钛合金材料的屈服极限。动态强度分析表明,支撑结构件抗外界动态干扰的能力足够强。
4 结 语
对450 mm×150 mm长条反射镜的单点挠性支撑方案进行研究表明,在保证系统结构具有高静态刚度、高动态强度的同时,反射镜具有良好的热尺寸稳定性,满足了成像质量要求。而整个反射镜组件重量只有4.5 kg,所以很适合在轻型空间遥感器中应用。
[1]姜景山.空间科学与应用[M].北京:科学出版社,2001.
[2]赵立新.空间太阳望远镜的热设计和热光学分析[J].航天返回与遥感,2002,23(1):11-18.
[3]吴清彬,陈时锦,董申.光学遥感器轻质反射镜的结构:热优化设计[J].光学技术,2003,29(5):562-567.
[4]张志杰,袁怡宝.单边导角形柔性铰链的计算与性能分析[J].光学精密工程,2007,15(3):384-389.
[5]薛实福,李庆祥.精密仪器设计[M].北京:清华大学出版社,1991.
[6]辛洪兵,郑伟智,赵罘.弹性铰链研究[J].光学精密工程,2003,11(1):89-94.
[7]Michell I.Anapol,Richard R Glasheen.Silicon carbide light telescopes for space application[J].SPIE,1993,18(1):51-57.
[8]吴泽勋,韩秀清,史慧云.列车水箱的弹塑性有限元分析[J].长春工业大学学报:自然科学版,2005,26(2):163-165.
猜你喜欢
华侨大学学报(自然科学版)(2023年1期)2023-01-12 01:15:06
航天返回与遥感(2022年3期)2022-07-07 05:13:36
电子技术应用(2021年1期)2021-01-22 09:45:06
卷宗(2018年14期)2018-06-29 07:58:26
航天返回与遥感(2018年2期)2018-05-17 09:37:57
制造技术与机床(2017年3期)2017-06-23 08:11:51
制造技术与机床(2017年3期)2017-06-23 08:11:25
中国医疗设备(2016年6期)2017-01-06 06:12:38
光学精密工程(2016年7期)2016-08-23 06:36:49
空间控制技术与应用(2015年1期)2015-06-05 12:22:16
