
基于小波的路面裂缝识别研究
2010-08-16 03:03:20孙波成邱延峻梁世庆
重庆交通大学学报(自然科学版) 2010年1期
孙波成,邱延峻,梁世庆
(1.西南交通大学 土木工程学院,四川 成都610031;2.西南交通大学峨眉校区,四川峨眉624202;3.襄樊学院,湖北襄樊441023)
路面裂缝是沥青路面和水泥混凝土路面的主要破损形式之一,也是路面维修养护和管理系统的重要内容。传统的基于人工视觉检测裂缝的方法愈来愈不能适应高速公路发展的要求,主要是速度慢、个人主观程度大、花费高、危险大、并还影响正常交通。当前计算机和图像处理技术的进步和发展,为路面裂缝的自动检测与识别提供了有效的手段。
目前路面裂缝识别的文献主要集中在图像边缘检测以及阈值分割,如各类边缘检测算子[1-2]。另外,文献[3]使用神经网络技术识别路面裂缝信息,它把均值和标准差作为参数训练神经网络样本,以便选择分割阈值。文献[4]提出了运用模糊集理论来检测和分割路面裂缝,认为裂缝像素总是比其周围的像素要暗。文献[5]运用数学形态学方法识别路面裂缝。文献[6-9]讨论了路面裂缝或路面其他损伤类型的自动识别方法,促进了路面损伤自动识别方法与技术的发展。
小波技术主要采用将空间域或时间域上的图像数据转换到小波域上,成为多层次的小波系数,对图像信号的处理就变成对小波系数的处理,根据小波基的特性,分析小波系数的特点,针对不同的需求,结合常规的图像处理方法或提出更适合小波分析的新算法来处理小波系数,再对处理后的小波系数进行逆变换,得到所需的目标图像,因此,在图像处理应用中显示了更好的优越性。由于路面纹理不同于其他结构面纹理,特别是沥青混凝土路面,因此需要进一步研究小波技术在路面表面损伤自动识别领域的应用方法。
本文通过分析和综合小波变换在路面裂缝检测中的应用,提出了基于图像重构的多分辨分析方法。通过2-D小波变换及其用于重构的逆变换,梯度方向和模最大值保存在小波系数当中,分析和变换小波系数最大值,可以检测路面图像的裂缝边缘并分离噪音。然后使用阈值技术,得到最后的路面裂缝二值图像。实验证明,小波技术用于路面图像裂缝识别能够取得较好的效果。
1 裂缝图像识别小波分析
1.1 小波基础
定义两个小波,它们分别是平滑函数三次样条曲线θ(x,y)在x轴和y轴的偏导数:

考虑到尺度系数s,上述小波为:
对于一个2 D 路面图像 f(x,y),ψ1(x,y)和 ψ2(x,y)两个小波分量为:W1(s,x,y)=f*(x,y)

1.2 裂缝边缘检测
定义在尺度2j,f(x,y)小波变换的梯度和模最大值:
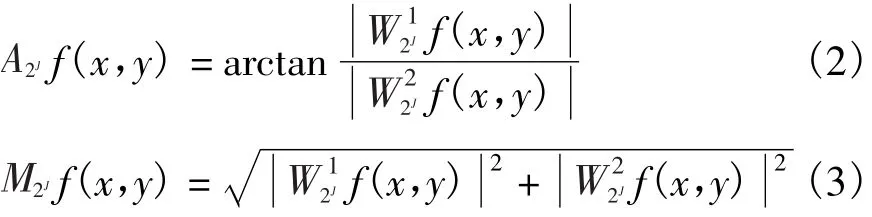
式中:W1和W2是梯度图像f(x,y)小波变换的两个分量,图像在尺度s的边缘点就是梯度矢量模f(x,y)×θ(x,y)最大值,也就是f(x,y)方向发生显著变化的地方。
在每个尺度2j,沿着梯度方向A2Jf(x,y),小波变换的局部最大值就是图像模M2Jf(x,y)在该方向的最大值,也是梯度矢量的拐点。记录每一个局部最大值和相应尺度的M2Jf(x,y)和。搜索和链接图像上小波最大值点,得到要识别的裂缝信息。图1显示了原始图像(a)及其分解水平为 2、3、4的模的最大值图像(b)、(c)、(d)。
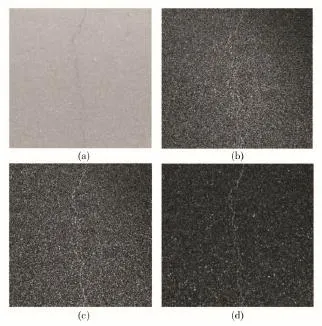
图1 原始图像和模最大值Fig.1 Original image and modulus maxima
1.3 改进的裂缝边缘检测算法
在上一节,根据在每个尺度2j上小波系数模最大值和相位(梯度方向)这两个分量的大小确定边缘的位置及属性。改进的算法在降低噪音的同时,对路面裂缝边缘有增强的作用。具体做法是在每个尺度2j上对小波变换的两个分量W1和 W2作变换:

图像裂缝边缘增强的目的是加强目标的特征信息,同时抑制噪音的影响。然而,带噪音的路面图像增强是所有增强算法都面临的难点,因为噪音与真实图像变化显著的边缘一样,在频域均对应于高频子带,当采用增强算法突显高频部分而提高边缘的对比度、改善图像质量的同时,将不可避免地放大噪音。本文的做法是对噪音和特征对应的小波系数分别做不同的处理,对第j层分解得到的子图像(x,y)作如下变换:

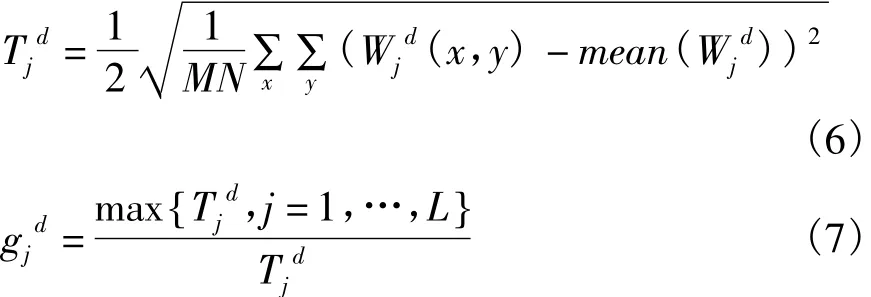

图2是按该算法进行边缘检测的结果。

图2 改进的裂缝检测算法Fig.2 Improved arithmetic
由图中看出,改进算法显著降低了图像的噪音。
2 实验结果与分析
在这一节中,主要对上节算法预处理的路面图像,实验其在不同的小波基、不同图像分解水平和不同子图像重构策略的性能和效果。所有的实验在个人计算机上执行,图像都是8位灰度图像。
2.1 小波基的选择
小波函数的选择主要考虑它的平滑性、空间域和频率域。一般来说,较长支持长度的小波具有更好的光滑性和频率域特性,但空域性差。从计算复杂性来看,支持长度应该越短越好,但太短的支持长度影响噪音的消除和图像的重构效果。另外还要考虑小波基的线性相位、所处理图像与小波基的相似性、小波的能量集中性等。因为噪音属于高频信号,重构平滑子图像fLL(J)可以消除规则的,重复出现的噪音。图3是利用前述的小波函数,对路面图像进行重构的结果(重构分解水平为3的平滑子图像),其中图3(a)为原始图像,图3(b)、图3(c)、图3(d)小波基分别为Haar、Db2、Db12的图像重构结果。

图3 不同小波基图像重构结果Fig.3 The result of various wavelet
从重构结果看,小波基的选择对图像重构的结果影响不大,双正交样条小波函数Bio比正交小波函数Db的重构效果要好,较高的支持长度的小波Db12在图像降噪比较低支持长度小波Db2效果更好。
2.2 图像分解水平
图像分解水平也是路面图像裂缝识别需要考虑的一个重要因素,精细和粗糙的分辨率捕获图像中精细和粗糙的尺度特征。选择适当的分解水平可有效地提高路面纹理图像表面裂缝识别的效果。
文献[9]通过分析适宜子图像的共生矩阵来决定图像的分解水平。理论上讨论最优分解水平超出了本文的范围,这里根据大量实验来评价适宜的分解水平。实验发现,太小的分解水平数(如J=1或2)不能有效地分离路面图像裂缝,然而太大的分解水平数(如J=5或6)又模糊了裂缝边缘,从而导致错误的检测。通过大量的路面图像实验,J=3或者4是最适宜的分解水平数,对减少噪音和增强裂缝有较好的效果。图4是图像haar小波分解后,各分解水平平滑子图像重构的效果,其中图4(a)为原始图像,而图4(b)~图4(d)为分解水平数J=2、3和5重构结果。
2.3 子图像合成策略
从前节知道,可根据图像的噪音特点,为降低噪音,可以选择不同的子图像进行重构。因此得到如下重构策略,式(8)中,J图像分解水平,W-1为小波变换的逆变换。
在路面图像裂缝的自动识别中,事先不知道图像存在什么方向的噪音,因此很难选择重构的子图像,事实上,仅对平滑字图像进行重构基本上能够达到消除随机噪音和增强裂缝的目的。如果路面存在大量的水平和垂直方向的纹理,如混凝土路面,这时可以按式(8)采用选择平滑子图像和斜线子图像的重构策略。

图4 不同分解水平的平滑子图像重构结果Fig.4 The effect of various number of multiresolution levels

根据本节介绍的图像重构策略,图5显示了原始图像及最后二值化结果。

图5 原始图像及二值化图像Fig.5 Original image and binary image
3 结论
本文研究了基于小波重构的路面裂缝检察算法,它不同于传统的图像分割算法,运用移动窗口在像素级别上分析图像特征,而是基于多分辨小波变换的图像重构策略,在计算复杂性和计算时间上具有一定的优势。适当选取不同分解水平的平滑子图像和高频子图像,重建后的图像在消除噪音的同时,增强裂缝边缘信息。最后用简单的阈值技术把裂缝从路面图像中分离出来。
基于小波的路面裂缝检测效果取决于小波基选择、图像分解水平和重构中子图像的选择策略。实验证明,利用高斯小波函数,分解水平为3,选取平滑子图像进行重构能够取得较好的效果。至于从理论上分析如何选取最佳的分解水平和重构的子图像,从而达到消除噪音,增强裂缝信息的目的,是下一步要研究的课题。
[1]Canny J.A computational approach to edge detection [J].IEEE Trans.Pattern Anal.Machine Intell,1986,8(6):679 -698.
[2]孙波成,邱延峻.基于图像处理的路面裂缝识别研究[J].重庆交通大学学报:自然科学版,2008,27(1):61-64.
[3]张娟,沙爱民,孙朝云,等.基于相位编组法的路面裂缝自动识别[J],中国公路学报,2008,21(2):39 -42.
[4]查旭东,王文强.基于图像处理技术的连续配筋混凝土路面裂缝宽度检测方法[J].长沙理工大学学报:自然科学版,2007,4(1):13-17.
[5]SUN Bocheng,QIU Yanjun.Automatic Identification of Pavement Cracks Using Mathematic Morphology[C]//International Conference on Transportation Engineering1America:American Society of Civil Engineers Press,2007:1783-1788.
[6]赵明宇,孙立军.一种路面损坏状况的数字图像识别方法[J].交通与计算机,2007,25(6):31-33.
[7]邵世鑫.沥青路面损坏模式识别技术研究[J].交通与计算机,2007,25(4):92-95.
[8]于向军,马若丁,刘岩,等.基于分形理论的路面裂缝图像分割研究[J].微计算机信息,2008,24(3/4):302-304.
[9]YAN Fany-han,PENG Fei-Shi.An adaptive level-selecting wavelet transform for texture defect detection [J].Image and Vision Computing,2007(25):1239-1248.
猜你喜欢
科技风(2021年19期)2021-09-07 14:04:29
小学科学(学生版)(2020年10期)2020-10-28 07:52:12
电子制作(2019年13期)2020-01-14 03:15:32
疯狂英语·新悦读(2019年10期)2019-12-13 09:02:32
制造技术与机床(2017年10期)2017-11-28 05:20:43
小火炬·阅读作文(2017年8期)2017-09-26 06:30:48
Coco薇(2017年9期)2017-09-07 22:09:28
通信产业报(2016年44期)2017-03-13 08:41:45
电测与仪表(2014年8期)2014-04-04 09:19:38
雕塑(1999年2期)1999-06-28 05:01:42
