
复杂电磁环境下一种新的航迹起始方法*
2010-08-11 05:27李修和
舰船电子工程 2010年7期
田 健 李修和 贺 平
(电子工程学院305教研室 合肥 230037)
1 引言
航迹起始是多目标跟踪领域中的首要问题,由于航迹起始时,目标一般距雷达站很远,传感器探测分辨力低,测量精度差,加之真假目标的出现无真正的统计规律,因此多目标航迹起始问题就显得非常复杂[1]。关于航迹起始问题,目前已经积累了众多的研究,多是基于有源定位跟踪系统的单传感器的情况,对密集杂波条件下和强电磁干扰等复杂电磁环境下多传感器尤其是有源与无源结合的定位跟踪系统的航迹起始问题的研究很少。
组网雷达系统由组网雷达、计算机、通讯设备、控制设备等组成,这是一种典型的多传感器数据融合系统,该系统采用数据融合技术对多部雷达的探测数据进行融合处理,所得数据比任何一部雷达对目标测量的精度更高、评估更全面准确,从而实现对目标的精确定位、跟踪、识别、态势和威胁估计。
本文提出了一种在复杂电磁环境下,集中式组网雷达如何充分发挥多雷达(有源雷达,无源雷达)信息的优势的航迹起始算法。该方法的基本思想如下:首先根据雷达网中的各有源雷达对目标进行主动扫描观测,然后利用逻辑法对扫描得到的量测建立波门,对后续量测数据进行关联,最后确认航迹。在整个过程中如果遇到电子干扰或反辐射导弹摧毁致使雷达数据缺失不能正常处理,这时就利用雷达网中的两个或多个无源雷达,先测得目标的方位角,然后再将目标的方位角数据建立方位航迹。通过换算进而获得坐标位置,协同有源雷达测的数据进行航迹起始[2]。
2 系统描述
本文所述的组网雷达系统是在有源组网雷达系统中辅以无源雷达目标定位跟踪系统。相比基于纯粹的有源定位跟踪系统,该系统在航迹处理方面有以下特点[2,4]:
1)抗电子干扰能力较强。当有源雷达遇到强电磁干扰时会缺失目标的扫描数据,不能正确的进行航迹起始。无源雷达却受到干扰影响很小,可以对目标继续探测。
2)具有探测隐身飞机的潜力。系统中的无源雷达可以利用敌隐身飞机自身辐射的信号进行探测。
3)低空探测能力较强,探测距离较远。无源雷达不存在强地杂波、海杂波干扰的问题,低空探测能力较强;而且其直接接收目标信号,电磁波单程传播,所以探测距离较远。相比有源雷达,无源雷达在敌机起飞阶段就对其进行航迹起始很有优势。
在该系统中,由有源雷达和无源雷达适当布站,并用通信手段链接成网,由中心站统一调配而形成的一个有机整体。系统对各雷达站获取的目标数据采用集中式系统的处理方式,这样融合中心可以充分利用各雷达的信息进行处理,跟踪精度较高。工作时,首先利用有源雷达主动扫描,将得到目标的量测数据由中心站用基于一步延迟的航迹起始法产生目标的起始航迹。当遇到电子干扰或反辐射导弹摧毁致使有源雷达数据缺失不能正常进行航迹起始时,由中心站控制该系统中的两部或两部以上的无源雷达探测目标,用其探测到的目标方位信息产生方位航迹,推算出目标的方位坐标值,再由中心站产生目标的起始航迹。
考虑二维平面内目标运动情况,目标状态方程为[3]:

量测方程为:

其中,H(k)为量测矩阵,

X(k)为目标的状态向量,量测噪声w(k)是独立零均值的高斯随机过程,具有协方差矩阵R(k)。
3 算法描述
1)在有源雷达获得目标数据后采用一种基于一步延迟的航迹起始方法[5~6]进行对目标的航迹起始。目标航迹l对应的量测序列用{zρ(l,1)(1),zρ(l,2)(2),…,zρ(l,M)(M)}来表示,这里 ρ(l,k)表示 k时刻与目标航迹l对应的量测编号。
(1)建立初始航迹
为初始时刻k接收到的每一个量测建立初始航迹起点,若对于目标的速度有一个粗略的估计,设其最大值为Vmax,最小值为Vmin,设传感器采用周期恒定的扫描方式,其扫描周期为 T,则以起点为圆心,分别以VminT和VmaxT为半径形成k+1时刻的确认区域,从而建立若干初始航迹。
(2)两步外推
如图1所示,对于k+1时刻的候选目标航迹a,进行一阶多项式外推,形成k+2时刻相应于此条初始航迹的确认区域,其中b为预报量测位置,b1,b2为该确认区域中的量测;分别利用b1,b2进行二阶多项式外推,获得k+3时刻的量测确认区域(预报量测位置分别为c和d)。

图1 一步延迟候选目标航迹扩展
(3)计算累积新息
对于量测确认区域中的每一个量测组合l,{zρ(l,k+2)(k+2),zρ(l,k+3)(k+3)},图 1 中为(b1,c1),(b2,d1),(b2,d2)。
定义
其中,ρ(l,k+2)表示 k+2时刻与量测组合 l对应的量测编号;ˆxl(i)为通过多项式拟合得到的与量测组合l对应的目标状态估值。

式(5)中我们取C(l)最小值所对应的量测组合作为k+1时刻航迹a扩展的量测。则从k+1时刻候选目标航迹a出发的航迹得到了唯一的扩展l*,然后对这条航迹进行除去第一步建立航迹的循环,直至满足航迹起始需要。
2)如果遇到电子干扰或反辐射导弹摧毁致使雷达数据缺失不能正常处理时,就调用经无源雷达处理得出的数据。利用无源雷达进行目标的坐标定位,定位一组或多组目标的坐标。
(1)以某个被动雷达初始时刻所测的方位角集中的每一个方位角测量值为中心建立初始方位波门,

式中,Vm为目标的最大运动速度,Vo为被动雷达载体的最大运动速度,Dmin为感兴趣探测区域的最小距离,T为时间间隔,σθ为被动雷达方位测量误差的标准差,Zi为第i次采样方位角测量集合。
(2)若第二次采样周期中录取的目标方位角测量值落入相应的初始波门内,此时可分为以下两种情况:
当初始波门内只有一个回波时,则判定该回波所对应的方位角测量值与波门中心所对应的方位角属于同一个目标,由这两个方位角测量值建立可能的方位航迹;
当初始波门内有多个回波时,则取其统计距离最近的回波为相关点迹,该点迹所对应的方位角测量值与波门中心所对应的方位角测量值属于同一个目标,并建立可能的方位航迹;而无方位角测量值落入的初始方位波门,则认为是虚假测量,予以取消;对上述每个方位航迹进行状态外推,并以外推点为中心建立后续波门,

(3)若下一时刻扫描所测得的点迹落入相应的后续波门内,则取落入后续波门内离外推点最近的予以相关,并进行状态外推,继续进行判断。若没有点迹落入后续波门内,则该点的测量值以0代替,同时进行状态外推。并以外椎点为中心建立加大的后续波门,

(4)若下一时刻所测得的点迹都落在加大的后续波门外,则认为该航迹是虚假航迹予以取消。否则,重复步骤(3)继续进行判断,直到满足准则为止。
然后用测得的数据对目标进行定位。设ˆθ1和ˆθ2分别为两个被动雷达某个时刻所测的目标方位角,经过简单的运算求得目标位置坐标的估计值为
(xs1,ys1)和(xs2,ys2)分别为两个被动雷达自身所在的位置。将目标位置坐标的估计值传至有源雷达进行补充,使之有效的进行航迹起始。
4 计算机仿真与分析
为了测试文中所给方法的有效性,我们利用Matlab软件进行了数字仿真。
1)假设两部无源雷达组网探测5个目标在XY平面的监视区域内作匀速直线运动。初始位置为(15000,95000),(25000,75000),(35000,55000),(25000,35000),(15000,15000)。由于在航迹起始阶段,目标的机动性很小,因此认为5个目标做近似匀速直线运动,速度均为vx=500m/s,vy=0m/s。同时假定雷达的采样周期均为 T=5s,测向误差分别为σθ=0.3°。无源雷达每次接收到的杂波个数按照泊松分布确定,即给定参数λ,首先产生(0,1)区间上均匀分布产生的随机数r,然后由下式

确定出J,则J就是要产生的杂波个数。
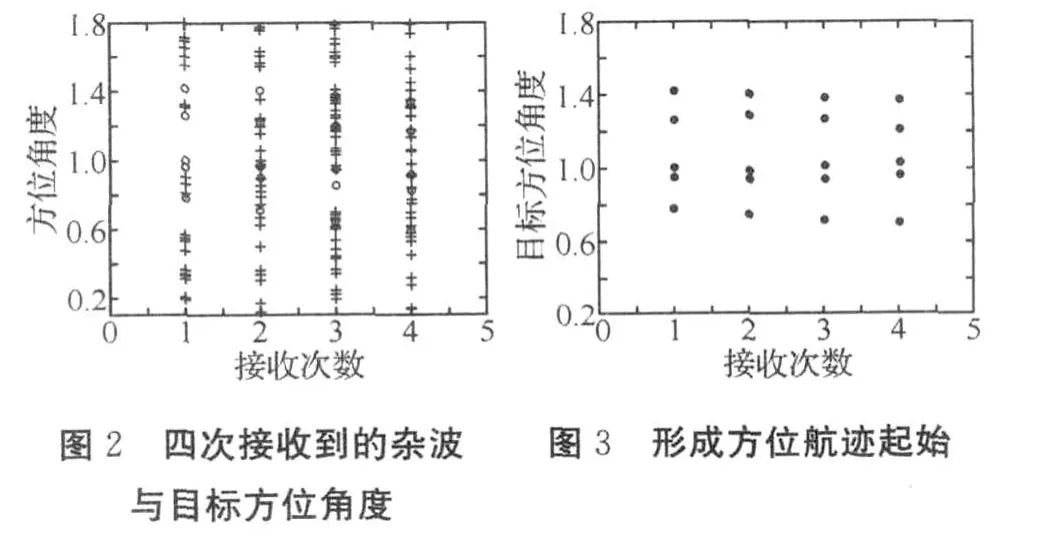
取λ=40,σθ=0.3°时,在连续四个扫描周期无源雷达经过对测得数据处理如图2、3所示,其中:“○”代表目标的测量方位角度值,“+”代表杂波点,“●”代表建立方位航迹起始后的目标方位角度。从图3可看出对目标方位角的航迹起始完全可以满足需要,结合组网雷达中另一部雷达测的目标方位角计算出目标的坐标值,然后将数据交给有源雷达数据处理系统。
2)假设三部两坐标有源雷达组网同时跟踪5个目标,同时假定雷达的采样周期均为T=5,各雷达的测向误差和测距误差相同,分别为σθ=0.3°和σr=40m。3部雷达每个周期的杂波个数按照式(11)确定出。
取λ=40时,在连续四个扫描周期3部雷达经过点迹压缩合并后的杂波点与真实点的态势如图4所示,其中:“○”代表真实的测量航迹点,*代表第一次扫描时的杂波点,“□”代表第二次扫描时的杂波点,“+”代表第三次扫描时的杂波点,“●”代表第四次扫描时的杂波点。
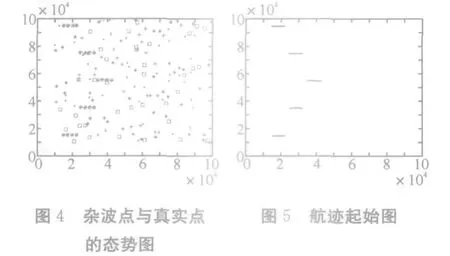

图6 被部分干扰后的航迹起始图
上述算法综合利用了多部雷达量测信息,采用基于一步延迟的方法得到航迹起始如图5,从图5可以看出该算法密集杂波条件下能快速有效地建立航迹。但是当有两批目标的回波部分被强电磁波干扰,中心站得不到真实数据,于是得到航迹起始如图6所示,很明显失去了两批目标的航迹,这时就需要用无源雷达测的数据协同进行目标航迹起始。而从图3看出在密集杂波条件下无源雷达能对目标方位角进行有效的测量,可以对有源雷达的残缺数据进行补充。
5 结语
本文提出了一种复杂电磁环境下集中式组网雷达的航迹起始方法。该方法将有源雷达与无源雷达协同使用,综合利用了多部雷达量测信息,采用一步延迟的航迹起始方法,可以快速有效地起始航迹。对于观测噪声较大甚至强干扰导致缺少量测信息的情况,能够利用无源雷达所接收处理的信息有效补充,建立航迹,并且虚假航迹数较少。能适应复杂环境的变化,有很好的应用前景。
[1]陈小伟,林家骏,等.修正的逻辑航迹起始算法性能研究[J].华东理工大学学报(自然科学版),2006
[2]何友,修建娟,等.雷达数据处理及应用[M].第二版.北京:电子工业出版社,2009
[3]袁刚才,吴永强,张杰.无源定位系统的快速航迹起算法[J].系统仿真学报,2005
[4]LIU Zong-xiang,XIE Wei-xin.A new method for track initiation in a distributed passive sensor network[C]//ICSP2008 Proceedings
[5]朱洪艳,韩崇昭.航迹起始算法研究[J].航空学报,2004,25(3):284~288
[6]刘双全,贺平,李修和.基于一步延迟航迹起始算法研究[J].电子技术,2009(1)
猜你喜欢
结构工程师(2022年2期)2022-07-15
空间科学学报(2020年3期)2020-07-24
空间科学学报(2020年4期)2020-04-22
电子制作(2019年12期)2019-07-16
现代计算机(2018年19期)2018-08-01
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2017年6期)2017-11-23
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
互联网天地(2016年2期)2016-05-04
火控雷达技术(2016年3期)2016-02-06
