
ATC系统中短期冲突探测方法的研究
2010-08-07 08:21:00程先峰龚维强
网络安全技术与应用 2010年9期
程先峰 龚维强
中国电子科技集团公司第二十八研究所 江苏 210007
0 前言
近年来,随着我国航空事业的飞速发展,空中交通流量急剧增加,对空中交通管制(Air Traffic Control, ATC)系统的要求越来越高,为管制人员提供高质量高效能的现代化管制设备是在高密度空中交通流量中保证飞行安全的重要条件。其中对飞机安全的冲突探测预告警功能的应用减轻了管制人员的工作压力,为飞机的安全飞行提供了极大的帮助。天上飞的航空器和马路上跑的汽车一样,也有自己的“交通规则”,飞机彼此间必须保持一定的水平和垂直间隔,以确保飞行安全和交通畅通。1976年9月10日发生在前南斯拉夫萨格勒布的空中相撞和2001年1月31日发生在日本的危险接近等都是飞机的飞行冲突引起的。空中交通管制中的短期冲突探测就是对飞行目标之间的间隔(包括垂直间隔、水平间隔)实时进行探测和计算,当飞行目标之间的间隔违反和将要违反安全间隔时,系统能发出告警,以便管制员有充分的时间对飞行目标进行调配。
1 短期冲突探测的处理方法
目前,国内外关于冲突探测的方法主要有:基于遗传算法的冲突探测、基于神经网络的冲突探测和基于非结构网格生成的冲突探测。这些方法各有特点,并取得一定效果。本文根据实际工程中的应用经验介绍一种新的处理方法。
飞行器之间的短期冲突探测算法分为三步来实现:第一步,为了减小计算量,可以按目标当前位置、高度进行具有潜在冲突的航迹对的初选;第二步,对前面选出的潜在冲突航迹进行当前冲突探测和预冲突探测;第三步,为了降低冲突的虚警对冲突要证实和确认。
1.1 按目标当前位置、高度进行具有潜在冲突的航迹对的初选
用检测两个航迹之间当前距离和高度差的方法初选具有潜在冲突的航迹对。距离门限取为冲突预测向前看时间(Tl)和目标最大可能飞行速度(Vmh)乘积的 2倍加上允许间距(Rth),Rt=2⋅Tl⋅Vmh+Rth高度差门限取为冲突预测时间和目标最大可能升降速度(Vmz)乘积的 2倍,加上允许高度差(Asep)Zt=2⋅Tl⋅Vmz+Asep。仅当两个航迹之间的距离和高度差同时小于相应门限时,判为具有潜在冲突的航迹对。为了减轻搜索量,可以在不同的空域使用不同的安全间距和高度差标准,不同的冲突预测向前看时间和不同的飞行器最大可能飞行速度及升降速度估值。
1.2 对潜在冲突航迹进行当前冲突探测和预冲突探测
1.2.1 当前冲突检测
(1)飞行态势检测,首先研究航迹对的水平飞行态势(参见图1)。
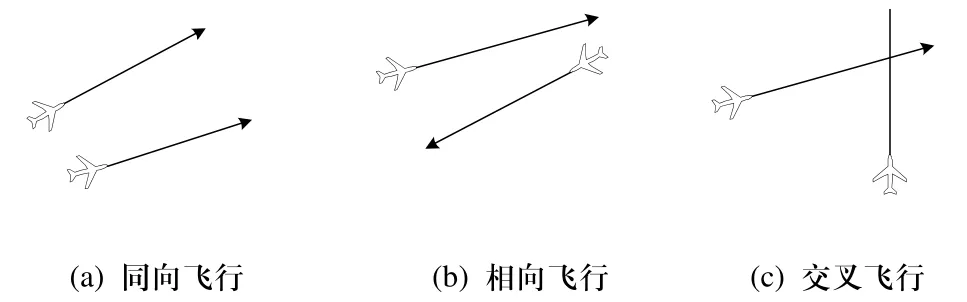
图1 相对飞行态势的检测
第一步,运用航迹对的矢量速度计算他们之间的夹角β:
① 夹角β在0β±范围之内,判别为同向飞行,0β为适应性参数;
② 夹角β在180°±β0范围之内,判别为相向飞行;
③ 夹角β为其它数值时,判别为交叉飞行。
第二步,计算航迹对矢量速度夹角的平分角线,并计算两个航迹点在夹角的平分角线的垂足(参见图2航迹点A的垂足为a,航迹点B的垂足为b)。
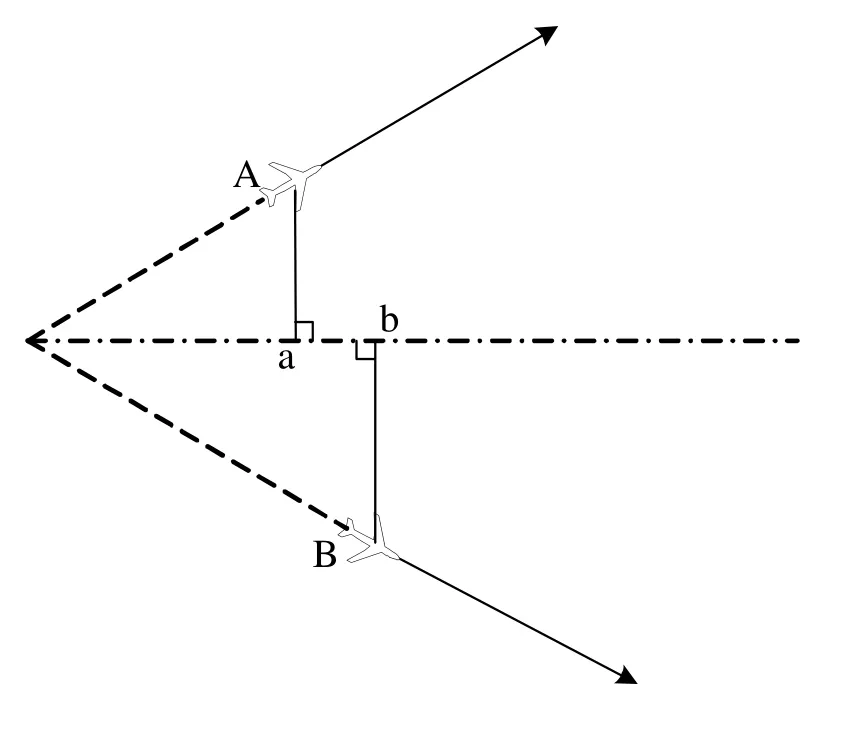
图2 横向和纵向间距的计算
第三步,得到它们的横向间距(Aa+Bb)和纵向间距(ab)。
(2)运用配对飞行计划判断两航空器飞行类型、机型和尾流类型,根据飞行是属于目视飞行、仪表飞行、同一机场放行航空器等情况,以便从间隔标准表中取得相应的横向和纵向间距间隔标准,进行比较。对同一机场放行航空器,还要根据同一跑道、平行跑道和交叉跑道3种不同情况,取得相应不同的横向和纵向间距间隔标准。
(3)最后,再决定两航空器当前所处飞行空域类型,得到最终判据,作出此航迹对是否有同时违反相应横向、纵向和垂直间隔标准的预警或告警的情况发生。在两航空器当前所处空域不同时,选用较严的标准判别,以保证不发生漏检。
1.2.2 预冲突探测
在完成上述当前预警或告警检测之后,要进一步进行预冲突探测。线性外推预测算法适用于匀速直线飞行或可视为匀速直线飞行的航空器对,用于预测0-Tl时间发生冲突的可能性。算法基于两航空器当前的三维位置和三维速度矢量,计算0-Tl时间是否有可能违反高度安全间距和水平安全间距的允许标准Asep和Rth。
设升降速度差门限为Vzth,水平速度差门限为Vhth(取值与冲突预测时间 Ta有关)。设航迹对的三维坐标和速度分别
则可用下列两式计算航迹对开始发生和开始脱离高度冲突的时刻Tv1和Tv2;
设:
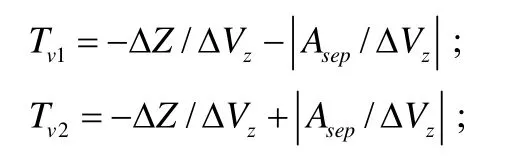
如果:Tv2≥0并且Tv1≤Tl,则在0-Tl时间内航迹对有高度间距小于Asep的情况存在(参见图3)。
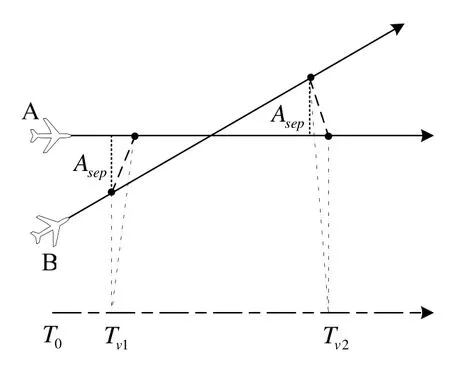
图3 高度冲突时间段
由Tv1和Tv2的具体表达式可以看出,它们的数值除主要依赖于当前高度差ΔZ和间隔标准Asep外,也显著依赖于升降速度的差值ΔVz。但是,在当前模式的高度间隔判别中,则完全不涉及升降速度的差ΔVz。由于升降速度的差值ΔVz对航空器在未来的高度差的影响随时间按正比例关系增加,所以,预推的时间越远就越不可靠;反之,预推的时间越短越可靠。在当前模式中,升降速度的差ΔVz将不起任何作用。
(2)CFL数据的应用
为减少航空器上升下降过程中的虚假告警,应该对设有许可高度(Cleared Flight Level,CFL)数据的源航迹使用高度层保护方法,探测高度冲突,与上面描述的航迹推测算法相结合,计算高度冲突发生和开始脱离时刻Tv1和 Tv2(参见图4)。
图4 CFL保护
航空器处于上升或下降状态并具有有效CFL值时,使用CFL加上(上升)或减去(下降)高度层容差值作为航迹推测高度的上限(上升)或下限(下降),进行高度冲突检测。当航迹通过CFL,并已穿过高度层容差时,不再使用CFL容差高度作为推测高度的极限,探测高度冲突。当用户未输入CFL数据或输入数据无效,系统将采用上述垂直间隔计算方式探测航迹对高度冲突。
(3)水平间距预测

可用下列两式计算航迹对开始发生和开始脱离水平冲突的时刻Th1和 Th2;
则航迹对最接近点的距离Rm:
如果:Th2≥0并且Th1≤Tl,则在0-Tl时间内航迹对有水平间距小于Rth的情况存在(参见图5)。
图5 水平冲突时间段
同样,由Th1和Th2的具体表达式也可以看出,它们的数值除主要依赖于当前位置差ΔX、ΔY和间隔标准Rth外,也显著依赖于速度的差值ΔVx、ΔVy。由于速度的方向和大小的差值(等效地说速度分量地差值ΔVx、ΔVy)对航空器在未来的位置差的影响随时间按正比例关系增加,所以预推的时间越长越不可靠;反之预推的时间越短越可靠。在当前模式中,速度的差值ΔVx、ΔVy将不起任何作用。
(4)线性冲突探测
进一步,如果:Th1≤Tv2并且Tv1≤Th2;则在0-Tl时间内航迹对有水平间距小于Rth和高度间距同时小于Asep的情况存在,即检测到飞行冲突,提交冲突证实处理。
1.3 冲突证实和确认
为了把因航迹轨迹方程参数估计不准等误差因素引起的虚警概率降至最低,必须对上述方法检测到的冲突加以证实。冲突证实采用航迹刷新周期滑窗相关法,依据计算得到的预测冲突时间 Ta与数倍航迹刷新周期K⋅Tc的大小关系选取滑窗宽度N和要求命中数M:
① Ta≤K1⋅Tc,立即确认告警(即N=M=1);
② K1⋅Tc<Ta≤K2⋅Tc,连续两个刷新周期满足此条件后,确认告警,否则重新确认;
③ K2⋅Tc<Ta,窗宽N,命中数M,即连续N个周期刷新中,如检测到M次冲突,则予以确认。
2 总结
空中交通管制系统是军民航空中交通运输系统的核心,而其中的冲突探测告警功能是其重要的一部分,在全国各类ATC系统中此功能均有不同程度的应用。国内外长期以来对关于这项技术的理论与应用展开了大量的研究,不断完善和推出新方法。本文是在实际工作中积累的一些知识和工程经验,对冲突探测的告警、预告警及确认等处理方法的介绍。
[1]刘星等.遗传算法在飞行冲突探测解脱中的应用[J].南京航空航天大学学报.2002.
[2]高翼,聂润兔.基于几何算法的空中交通冲突探测与解决模型[C].第六届全国交通运输领域青年学术会议.2005.
猜你喜欢
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:42
语数外学习·高中版上旬(2020年8期)2020-09-10 07:22:44
青年歌声(2019年12期)2019-12-17 06:32:32
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:38
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
西南石油大学学报(社会科学版)(2016年1期)2016-12-01 05:21:32
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
太空探索(2016年3期)2016-07-12 09:58:45
太空探索(2016年8期)2016-07-10 09:21:58
广西电力(2016年5期)2016-07-10 09:16:44
