
充电式串联混合动力公交车性能仿真
2010-08-06 09:54刘宇亮
浙江交通职业技术学院学报 2010年4期
刘宇亮,甘 伟
(浙江工业职业技术学院,浙江 绍兴 312000)
0 引 言
随着城市汽车保有量的不断增加,城市公共交通变得相对拥挤,公交车时走时停,燃油浪费现象严重,城市环境污染问题也日益突出。混合动力公交车融合了传统燃油汽车和纯电动汽车的优点,在节约能源和降低排放方面具有明显优势,因此,应该充分发挥混合动力公交车在解决节能减排、环境保护问题上的积极作用[1]。
利用电动汽车仿真软件ADVISOR,分别建立了应用模糊控制策略的串联与充电式串联混合动力公交车的仿真模型,在此基础上,按照荷电状态SOC、动力性能、燃料经济性能、尾气排放的顺序,对比分析了两组公交车的仿真结果。
1 系统选型与参数确定
1.1 发动机参数的确定
近年来,由于电子控制技术、优化设计技术、增压技术、排气后处理技术的应用,使得柴油机的综合性能,尤其是排放性能有了极大的提高[2]。无论从混合动力系统自身的特点出发,还是从车用动力的发展趋势来说,四冲程柴油机都是开发混合动力客车动力系统的首选。
选用的四冲程柴油发动机参数如下:最大功率92 kW/转速3 000~3 500 rpm;最大扭矩200 Nm;最高转速2 000~2 500 rpm;总排量3.92 L。
1.2 电动机参数的确定
电动机的主要参数包括额定功率、峰值功率和额定转速、最大转速。电动机的功率主要依据汽车的最高车速、爬坡性能和加速性能来确定,并与传动系统的传动比有一定的关系[3]。本文选用的三相异步交流感应电动机电动机的参数如下:额定功率68kW;峰值功率140kW;额定转速2000rpm;最高转速4 000 rpm;额定扭矩182 Nm;峰值扭矩358Nm。
1.3 传动比的确定
确定的混合动力公交车传动系传动比为:一档3.51∶1;二档1.90∶1;三档1.44∶1;四档 1.00∶1;倒档0.74∶1;主减速器速比 6.14∶1。
1.4 动力电池组参数的确定
电池的选择不仅要考虑满足提供电功率的需要,还要考虑满足车辆的续驶里程。可由下列公式进行计算:

式中:Wess为电池实际放出的能量,kWh;Wroad汽车行驶过程中所需能量,kWh;Pess为纯电动行驶功率,kW;t为续驶时间,h;n为电池数量;C为单节电池的容量,Ah;U为单节电池的输出电压,V;S为电池的续驶里程,km;vele为纯电动行驶车速,km/h。(注:上述参数选取软件ADVISOR内部模块自带的初始值。)
通过公式(1)、(2)和 (3)可以得到所需电池数量的范围,综合考虑其他因素,就可以确定电池组的数量。本文选用镍氢动力电池组的参数为:额定电压12 V;块数30;总容量90Ah。
1.5 整车参数的确定
根据传统城市公交车的参数确定串联式混合动力公交车的整车参数。传统客车的整车参数如表1所示。

表1 传统客车的整车参数
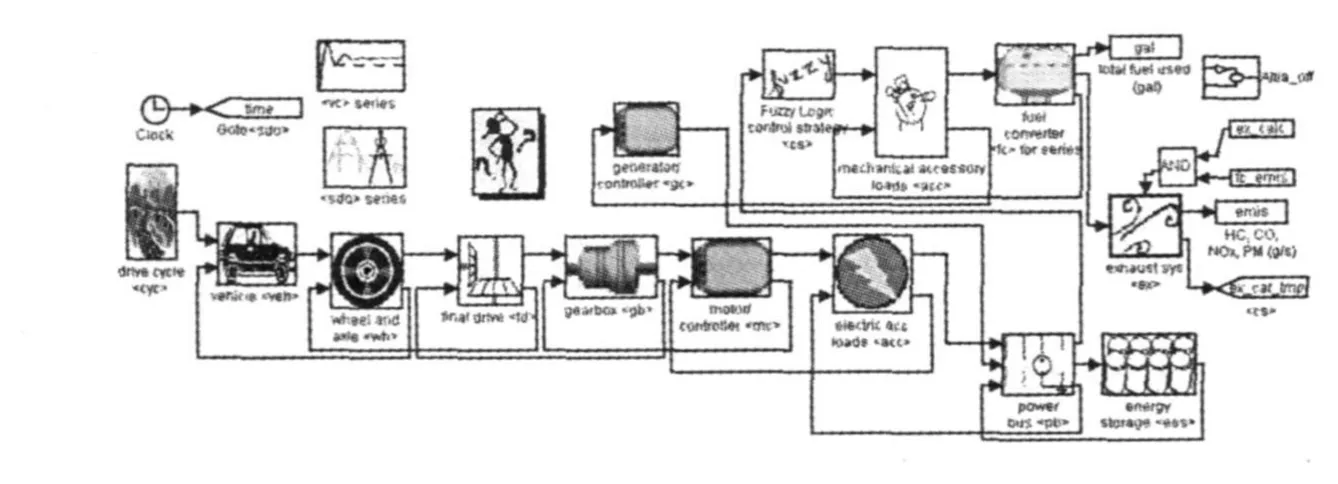
图1 应用模糊控制策略的串联式混合动力公交车顶层仿真模型
2 建模与仿真
2.1 整车仿真模型的建立
利用ADVISOR软件提供的开放代码来建立所需的公交车仿真模型,以循环工况为输入,逆推在此工况要求下,驱动系统各部件必须具备和可以得到的转矩、转速、功率等信息,进而对汽车性能进行分析[4]。
串联式混合动力公交车顶层仿真模型,如图1所示。ADVISOR中主要模块及其M文件的命名原则如表2所示。

表2 ADVISOR中主要模块及其M文件的命名原则
2.2 模糊控制策略的应用
所建立的模糊控制策略的主要目标是:通过综合考虑发动机和蓄电池的工作效率来实现混合动力驱动系统的整体效率达到最高。
模糊逻辑的三个输入量分别为:①整车的需求功率和当前转速下发动机最优功率的差值;②蓄电池组SOC值的估计值。③路况。输出量只有一个,就是转矩。
利用Matlab/Simulink建立了模糊控制器仿真模型,如图2所示。将其嵌入到ADVISOR中以实现混合动力系统的能量分配。

图2 模糊控制器的仿真模型
控制策略的主要过程是根据当前车速下的总转矩,将驾驶员的踏板操作解释成请求转矩Tr。当Tr>0时,系统进入驱动模式,控制策略则将Tr在发动机和电机间进行分配,分配的结果决定了系统的工作模式;当Tr<0时,系统进入制动模式,再生制动采用简单的策略:电机在自身和电池的限制下最大可能地回收制动能量,不足的制动力矩由摩擦制动补充。
2.3 最佳转矩的计算
发动机工作时,根据不同的转矩和转速,确定与之对应的发动机的燃料经济性和排放特性的数据信息。图3中 (a)~(c),分别是CO,HC,NOx三种气体的排放趋势三维数据图,图(d)是发动机效率的三维数据图。通过四个图,可以看出CO,HC,NOx,发动机效率与发动机转矩、转速之间的关系。

图3 发动机排放趋势与燃油效率
确定发动机最佳工作点的计算过程,主要与燃油效率和CO、HC、NOx三种气体的排放有关。在任何特定时间点,根据驱动系统的配置和传动比,仿真可以确定内燃机的转速。这就是在该 “瞬时”,经优化计算得到的发动机转速。计算中所需的四个数据,全部来自于图3中 (a)~(d)的三维数据图。确定发动机最佳工作点的计算公式如下:

公式 (4)中的数据是在特定的发动机转速下经过归一化处理后得到的数值。归一化是为了归纳统一样本的统计分布性,是同一在0-1之间的统计概率分布,函数图像的积分值是1,并且呈现的特征与正态分布相似。为了数据处理方便,首先基本度量单位要同一,把数据映射到0-1范围之内处理,归到数字信号处理范畴之内。
本文建立的最佳转矩计算模型如图4所示。

图4 最佳转矩计算模型
3 性能仿真结果分析
3.1 行驶工况的选择与仿真
选择与我国的典型城市公交车行驶工况最接近的行驶工况CYC—UDDS作为测试工况[1]。CYC—UDDS的主要特征参数如表3所示。行驶工况图如图5所示。
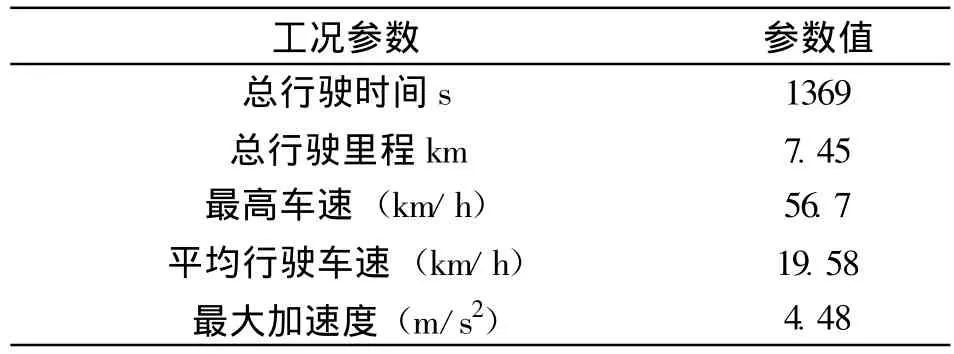
表3 CYC—UDDS循环工况参数

图5 行驶工况CYC—UDDS(Speed/Grade vs.time)
为提高仿真结果的对比性,严格按照充电式混合动力的定义,在串联混合动力公交车的仿真模型的基础上,建立充电式混合动力的仿真模式。具体方法是:①增加电池数量。在不改变原串联仿真模型的基础上,额外增加3块同型号的镍氢电池。②改变SOC的初始值。将充电式混合动力公交车的仿真模型的SOC初始值统一设置成100%。
3.2 荷电状态SOC的仿真结果分析
SOC(State Of Charge),即动力电池组的充放电状态,也称为荷电状态,它反映的是混合动力汽车在运行过程中动力电池组所处的充放电状态。SOC的值介于0和1之间,单位为%。
SOC的仿真结果如图6-图9所示。
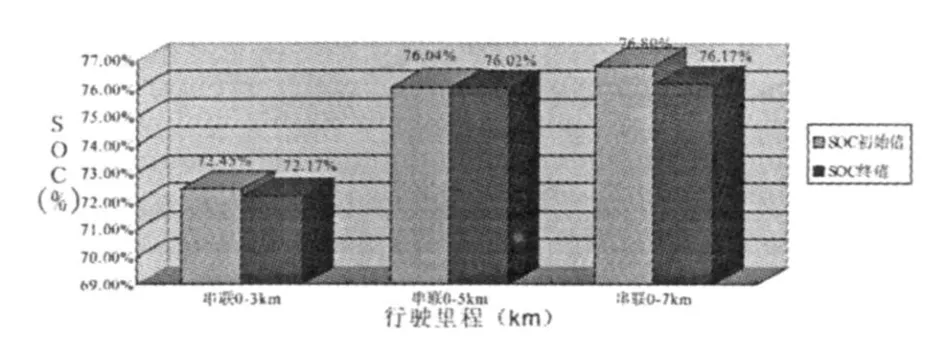
图6 串联式混合动力公交车动力电池组SOC变化

图7 充电式串联混合动力公交车动力电池组SOC变化

图8 串联式混合动力公交车SOC的仿真结果

图9 充电式串联混合动力公交车SOC的仿真结果
通过上面两组SOC的变化曲线可以看出:(1)在整个1369s的行驶时间里,串混合动力始终处于充、放电的混合动力工作模式过程中。
(2)充电式串联混合动力在大约200s左右开始进入充、放电的混合动力工作模式,在此之前,动力电池组一直处于放电的纯电动工作模式。
3.3 动力性能仿真结果分析
由于城市交通繁忙,混合动力公交车在行驶中需要经常制动、停车和起步,因此,加速性能是评价混合动力公交车动力性的主要指标之一。加速时间、最大加速度、最高车速和最大爬坡度仿真结果如图10-图1 2所示。

图10 加速度仿真结果

图11 最大加速度和最高车速仿真结果

图12 最大爬坡度仿真结果
通过分析加速时间、最大加速度、最高车速、最大爬坡度的仿真结果,可以得出以下结论:
(1)对于充电式混合动力公交车而言,由于其仿真模型与原混合动力公交车模型是基于相同的动力系统,所以仿真结果在动力性能上没有出现明显变化。
(2)所建立的混合动力公交车仿真模型是按照传统城市公交车的参数和标准进行配置的,动力性能的仿真结果,具体包括最高车速、最大加速度、加速时间、最大爬坡度等指标是满足城市道路交通要求的。
3.3 燃料经济性能仿真结果分析
评价燃油经济性的一个重要指标就是汽车行驶一定路程所消耗的燃料的多少。但对于混合动力汽车的经济性能来讲,不能只考虑燃油的消耗,也要考虑到电能的消耗,为此要引入 “等效燃油消耗”的概念[5]。
为了正确评价混合动力汽车的燃料经济性能,建立以下函数:

式 (5)中,Ee[Te(t),ωe(t)]为发动机消耗热能,Em[Tm(t),ωm(t)]为电机消耗的电能,s(t)为等效因子。
串联与充电式串联等效燃油消耗仿真结果如图13所示。

图13 等效燃油消耗仿真结果
等效燃油消耗仿真结果表明:
(1)由于充电式混合动力公交车的SOC初始值为100%,在开始运行阶段一直处于放电状态,更多依赖于电能,因此,在燃料经济性能方面,比原混合动力公交车有所提高。
(2)通过分析表7中的数据,发现在0-7km的行驶区间内,充电式串联比原串联混合动力的等效燃油消耗下降了19%。
3.4 尾气排放仿真结果分析
汽车尾气排放是指从废气中排出的CO(一氧化碳)、NOx(氮氧化物)、PM(微粒,碳烟)、HC(碳氢化合物)等有害气体。它们都是发动机在燃烧做功过程中产生的有害气体。图14—图16是串联与充电式串联混合动力公交车的尾气排放仿真结果。

图14 CO2的仿真结果

图15 NOX的仿真结果

图16 PM的仿真结果
尾气排放仿真结果表明:
(1)在尾气排放方面,充电式混合动力比原混合动力公交车仿真模型有了较大的改善。
(2)串联的微粒物排放较少,是因为串联混合动力车的发动机工作在高效的工况,抑制了PM的产生。
(3)串联在NOX排放方面数值较高。PM与NOX由于生成机理相反,所以表现出很强的平衡关系。
4 结 语
串联式混合动力公交车的发动机在最佳工况点附近稳定运转,通过调整电池和电动机的输出来达到调整车速的目的,进而使发动机避免了怠速和低速运转,从而提高了发动机的效率,减少了废气排放。
建立的串联混合动力公交车仿真模型的动力性能较好,可以满足城市工况的要求,适合城市内频繁起步和低速工况。此外,通过对比分析仿真结果,可以发现,充电式混合动力公交车模型在经济性与排放性上有更好的表现。
[1]陈清泉,孙逢春.现代电动汽车技术[M].北京:北京理工大学出版社,2002.
[2]吴强华.串联混合动力城市客车若干关键问题的研究[D].长春:吉林大学,2003.
[3]何洪文,祝嘉光,李剑.混合动力电动汽车技术发展与现状[J].车辆与动力技术,2004,(2):50-55.
[4]张翔,赵韩,钱立军,等.电动汽车仿真软件ADVISOR的应用[J].交通科技与经济,2004,(3):40-43.
[5]吴剑,张承慧,崔纳新.并联式混合动力汽车的BP网络实时能量管理[J].电机与控制学报,2008,12(5):115-119.
猜你喜欢
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
民间故事选刊(2021年11期)2021-11-12
学苑创造·A版(2019年5期)2019-06-17
新世纪智能(英语备考)(2018年11期)2018-12-29
故事作文·高年级(2017年10期)2017-10-19
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
小学阅读指南·低年级版(2016年1期)2016-09-10
探测与控制学报(2015年4期)2015-12-15
客车技术与研究(2014年6期)2014-02-28
