
工程GPS控制网精度分析
2010-07-12 08:50杜宝玉王圻伊王绍明
黑龙江交通科技 2010年3期
陈 磊,杜宝玉,王圻伊,王绍明,蒋 力
(黑龙江工程学院测绘工程系)
0 引 言
随着经济发展国家建设的需要,GPS定位技术以其精度高、速度快、费用低、操作简便等优良特性在测绘、土木、水利、电力等众多领域中得到了非常广泛的应用,特别是在测绘领域中的大地测量、变形测量和精密工程测量中更是发挥着其他技术无法替代的作用。从 GPS网布设的连接方式、已知点数目、观测时间长短等因素进行了实际分析和研究,并得出了相关结论。希望能对今后GPS网的优化设计起到参考作用。
根据已有资料不难发现在利用GPS测量定位技术施测各种用途的控制网时,当同步图形采用不同的方式进行连接时,最后测得结果精度也会有所不同。由于边连接方式会形成较多闭合条件与复测边,多余观测较多使其无论是在数据可靠性还是最后平差成果精度方面都优于边点混合及单纯的点连接布网形式;当已知点数目不同时,最后处理的结果精度也会有所差别,适当数目的已知点能够更好的实现约束平差计算,能够更准确地计算出相应的转换参数;当分别采用单、双频接收机,有时所测结果的精度也会有所不同,当基线距离较长时(一般大于 10 km左右),双频接收机测量定位结果精度要好于单频接收机定位结果的精度。但在基线距离较短时二者测量定位结果精度相当,因此在考虑到工程实际需要和经济成本的前提下施工人员对于仪器的选择会有一个良好的方案;当观测时间长短不同的情况下测得结果精度也会有所不同,由于长时间可获取较多数量的观测数据,进行数据处理时精度要高,但是在考虑到实际条件和经济成本的前提下并非观测时间越长越好;进行GPS测量时,晚上天黑以后进行GPS测量往往可以获得精度较高的观测数据,这是由于白天电离层受太阳光照射影响很强,电离层中带电离子较多,而夜晚电离层中带电离子很少,电离层对观测值的折射影响很小,因而晚上天黑以后进行 GPS测量时往往可以获得精度较高的观测数据。
1 测区概况
本次野外施测部署两个GPS控制网,分别为 GPS控制网A和 GPS控制网 B。GPS控制网 A部署区域为某市城区,地势为平坦,区域内建筑物较少,视野较开阔。GPS控制网A共有 21条基线组成,重复基线 11条,其中点 p001、p004、p005、p006为已知地方坐标的控制点。GPS控制网 B部署区域为某城市市区交通道路建设工程控制网的一部分,视野开阔,地势平坦,本次共部署二维测线 3条,其中重复基线 3条。
2 GPS数据采集处理及其分析
2.1 GPS数据采集
GPS控制网A分别采用南方 GPS单频接收机进行同步观测,每时段为 1 h左右,同步接收卫星个数最多为 12颗,最少为 6颗,卫星截止高度角为 5°,数据历元间隔为 5 s,PDOP值最大值为 5.2,接收机与卫星的图形结构良好。GPS控制网 B采用南方 GPS单频接收机和天宝 GPS双频接收机,白天和夜晚分别进行同步观测,每时段为 1 h,同步接收卫星个数最多为 8颗,最少为 4颗,卫星截止高度角为 5°,数据历元间隔为 5 s。
2.2 GPS数据处理
2.3 GPS数据分析
(1)不同网形结构及已知点个数条件下的精度分析比较。
在 GPS控制网 A中利用南方 GPS处理软件 4.0进行删除,不同基线获得不同边连方式的网形,边点混连方式,点连方式的网形图,通过南方GPS处理软件 4.0对已知点的有效性进行控制,从而得出一个已知点,两个已知点,三个已知点,四个已知点条件下采用不同 GPS网形连接方式下,利用现有的已知点进行二维约束条件平差,利用不同个数已知点进行平差处理推出北京 54坐标系下 P001点坐标,和 P001点已知坐标进行计算得出其点位误差,并对其进行比较分析。现将结果列在表 1中。
通过表 1可计算出边连方式的平均点位误差为0.022 0m,点连方式平均点位误差为 0.026,边点混连方式平均点位误差为 0.025 9,已知一个已知点情况下的平均点位误差为 0.041 4m,已知两个已知点情况下的平均点位误差为 0.018 2m,已知三个已知点情况下的平均点位误差为0.018 8 m,已知四个已知点情况下的平均点位误差为0.022 8m。由此可知边连方式点位精度优于边点混连方式点位精度,而边点混连方式点位精度优于点连方式点位精度。一个已知点的点位精度劣于两个已知点的点位精度,两个已知点的点位精度劣于三个已知点的点位精度,但三个已知点的点位精度却优于四个已知点的点位精度。
(2)不同接收机及时间长度条件下的精度分析比较。
在 GPS控制网B中通过TGO处理软件对天宝 5 800接收机获得白天 8∶00~ 10∶00之间的观测数据和晚上 20∶00~22∶00之间的观测数据进行处理,利用软件选择观测时间为 30min和60min进行数据无约束平差,从而获得其在WGS-84坐标下基线比例误差,并对其比较分析。其结果如表 2所示。
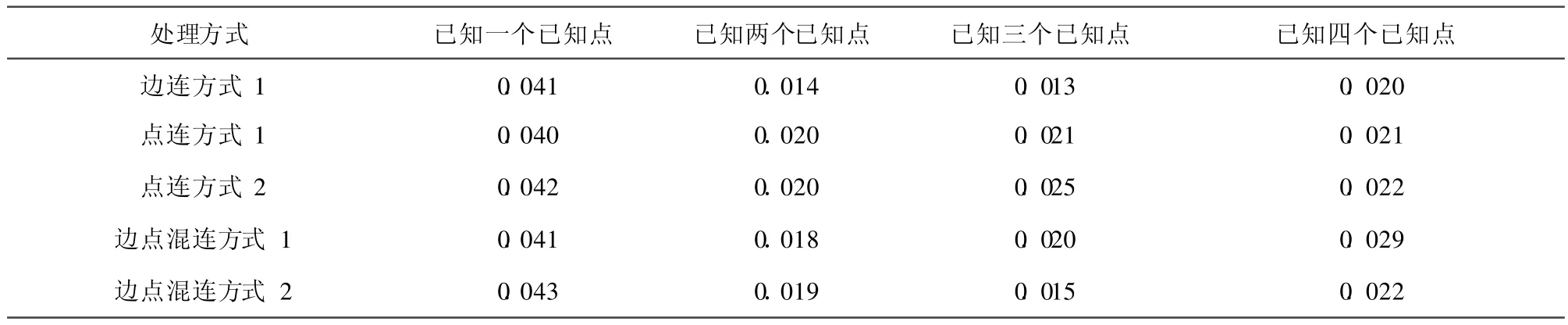
表 1 GPS控制网 A经数据处理之后不同条件下成果比较 m
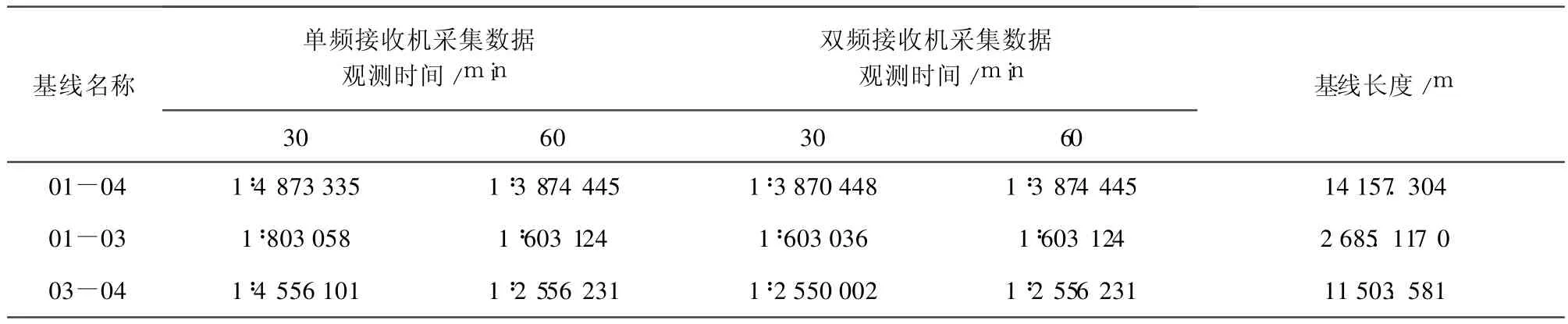
表 2 GPS控制网 A经数据处理之后不同条件下成果比较
通过上表可知对于同一条基线而言,30m in所获的基线比例误差大于 60所获得的基线比例误差;对于 01-03这条相对较短的基线,单双频接收机在同等条件下如观测时间为30min条件下前者所获得基线比例误差总体小于后者,而在观测时间为 60min条件下前者所获得基线比例误差总体大于后者,但二者精度相当;对于距离大于 10 km的 01-04基线很明显双频接收机所获取的基线比例误差小于单频接收机所获取的基线比例误差。
(3)同等观测条件下,白天与夜晚观测精度的比较分析。
对 GPS控制网B中在同等观测条件下,利用南方单频接收机在白天和晚上天黑以后分别进行实测,并对所获得的观测数据分别进行基线解算,现将各条基线的解算结果及其各参数列于表 3中。

表 3 各基线解算结果精度比较分析
从表 3所列数据的情况可以看出,比较相对精度和边长中误差两项可知晚间观测数据的解算结果精度要高于上午观测数据的解算结果精度。从上面对实测数据的解算结果进行分析,对于单频接收机当距离较远(一般距离大于10 km)时,其晚间天黑以后的观测数据解算结果精度要高于白天观测数据的解算结果精度,而且距离越长效果越明显。
3 结束语
(1)在其他条件相同的情况下,GPS网采用边连接方式布网时测量定位结果的精度优于边点混合连接方式;而边点混合连接方式布网时的测量定位结果的精度要优于点连接方式布网的结果精度。
(2)一般情况下已知点的数目越多 GPS网最终获得的结果精度越高,但所使用的已知点必须经过检验不含有粗差。在实际进行GPS测量时由于其他因素的限制不可能有很多的已知点,只有依据网形的特点及其大小选择合适数目的已知点才能获得较高的结果精度。
(3)通过上面计算可知观测时间为 60 min比观测时间为 30min的结果相对误差较低,精度较好。一般情况下在一定时间内观测时间越长最终结果精度越高,但是在实际作业时当观测时间达到规范规定的时间后,再增加观测时间对最终结果精度没有明显的作用,只会增加作业成本。
(4)在利用GPS测量定位技术施测各种用途的控制网时,当采用不同接收机(单频或双频)进行测量时,其定位结果的精度会有所不同,从表 2可知当距离较长时(一般大于10 km)双频接收机测量定位结果精度高于单频接收机;当距离较短时单、双频接收机测量定位结果的精度相当。
(5)在同等观测条件下,晚上天黑以后进行 GPS测量往往可以获得较高精度的观测数据,从控制单一变量的原则出发,得出结论,由于夜晚电离层活动相对于白天来说较弱,对GPS观测值的影响就相应地减小,所以晚上天黑以后进行GPS测量精度高于白天。
[1] 魏子卿,葛茂荣.GPS相对定位的数学模型[M].北京:测绘出版社,1998.
[2] 刘大杰,施一民,过静珺.全球定位系统(GPS)的原理与数据处理[M].上海:同济大学出版社,1996.
[3] 徐绍铨,张华海等.GPS测量原理及运用[M].武汉:武汉测绘科技大学出版社,1998.
[4] CJJ73-97,全球定位系统城市测量技术规程[S].
[5] 黄声享,郭英起,易庆林.GPS在测量工程中的应用[M].北京:测绘出版社,2007.
[6] 毛坤德,赵长胜,周园.城市 GPS控制网优化设计[J].矿山测量,2007(9):13~16.
[7] 张凤举,张海华,赵长胜等.控制测量学(第二版)[M].北京:煤炭工业出版社,2003.
猜你喜欢
装备制造技术(2021年4期)2021-08-05
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
制造技术与机床(2018年12期)2018-12-23
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
证券市场红周刊(2018年37期)2018-05-14
舰船电子对抗(2016年5期)2016-12-13
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
