模糊数据融合故障诊断在电缆监测中的应用
2010-06-22 08:20孙文义马淑华顾德英
单片机与嵌入式系统应用 2010年2期
孙文义,马淑华,顾德英
(东北大学秦皇岛分校 自动化工程系,秦皇岛066004)
引 言
路灯电缆工作状况相对复杂,通电和断电交替进行,灯具启动时电流较大。由于灯具老化,正常工作过程中一些灯会出现自熄等现象。监测系统不仅要求检测出电缆的各种故障,而且对实时性和准确性要求较高。要达到一定的监测精度,需要检测的信息量较多[1]。
多传感器数据融合技术是利用计算机技术将来自多传感器或多源的信息和数据,在一定准则下进行自动分析、综合,为完成所需要的决策和估计而进行的信息处理过程。它是针对系统中使用多个传感器这一问题而展开的一种数据处理方法,通过对多类同构或异构传感器的冗余信息和互补信息进行融合,得到被监测对象的更加精确的评估,以便对事物进行正确的判断和决策。
在设备诊断领域,由于设备本身的复杂性和运行环境的不稳定性,单传感器反映的设备信息具有不确定性。这种不确定性的存在必然导致故障诊断准确率降低,甚至出现漏检和误诊断现象。多传感器信息融合技术的发展为解决复杂系统故障诊断的不确定性问题,提供了一条新的途径[2-4]。
对于路灯电缆防盗监测系统,单一传感器只能获得部分特定信息,只有采用多传感器数据融合后才能准确地、完善地反映出整个系统的信息。对于路灯电缆故障诊断,由于路灯负载种类差距较大,很难建立统一、确切的数学模型。因此,在路灯电缆防盗监测系统中采取模糊数据融合故障诊断方法,一定程度上增加了监测的准确性,改善了路灯电缆防盗监测系统的性能。
1 模糊数据融合故障诊断方法研究
目前,故障诊断的数据融合方法主要可分为:贝叶斯定理数据融合故障诊断方法、模糊数据融合故障诊断方法、D-S证据理论数据融合故障诊断方法、神经网络数据融合故障诊断方法。
数据融合故障诊断在提高诊断准确率上有独特的优点,但也有局限性。贝叶斯方法中先验概率难以确定;模糊故障诊断中,在选择各传感器的影响权重时含有一定的主观因素,如选择不当必将影响诊断准确性;D-S证据理论中故障信度函数的确定也存在人为因素;神经网络数据融合,不仅存在确定故障隶属度值的困难,而且存在训练样本难以获取的问题。因此,在实际应用时既要考虑到融合方法各自的不足,又要发挥融合方法的优点,设计出高质量的诊断系统。
在路灯防盗系统中,传感器数目较少,各传感器权重以及各传感器数据对不同故障类型的隶属度都可以通过现场实验获取。本文选择模糊数据融合故障诊断方法进行设计。
2 系统结构
路灯电缆防盗监测系统的模糊信息融合故障诊断的结构如图1所示。该结构中,电缆故障诊断的过程分为:
①信号采集。通过传感器采集电缆运行状态的特征信号,如电压、电流、通电状态等。
②模糊数据融合。将采集的每个传感器的数据进行模糊化处理,从而构成模糊关系矩阵,与传感器权重向量进行合成运算,得到合成结果。
③故障诊断。将融合中心的结果按照一定的规则进行评判,最后评判出系统的故障类型。

图1 系统结构
3 模糊数据融合故障诊断方法
模糊集的基本思想是把普通集合中的绝对隶属关系灵活化,使元素对集合的隶属度从原来只能取0、1扩充到可取[0,1]区间中的任一数值,因此很适合于用来对传感器信息的不确定性进行描述和处理。在应用多传感器信息进行融合时,模糊集理论用隶属函数表示各传感器信息的不确定性,再利用模糊变换进行数据处理。
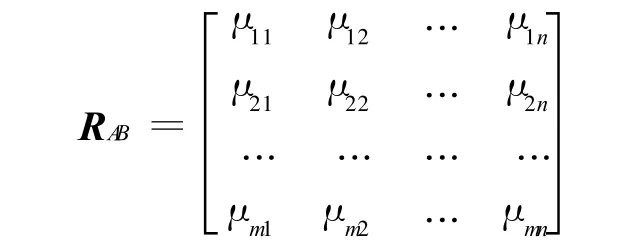
首先,设 A为故障诊断系统可能决策的集合,如被诊断的设备故障集合;B为传感器的集合。A和B的关系矩阵RAB中的元素μij表示由传感器i推断决策为j的可能性,X表示各传感器判断的可信度,经过模糊变换得到的Y是融合后各决策的可能性。具体来说,假设有 m个传感器对被诊断系统进行测试,而系统可能决策有n个,那么

传感器对各可能决策的判断,用定义在A上的隶属度函数表示。设传感器i对待诊断系统的判断结果为:[μi1/决策1,μi2/决策2,…,μin/决策n],其中(0 <μij<1),即认为结果为决策 j的可能性为 μij,记为向量(μi1,μi2,…,μin),m个传感器构成AB的关系矩阵
将各传感器判断的可信度用B上的隶属度X={X1/传感器1,X2/传感器2,…,Xm/传感器m}表示,那么由Y=XRAB进行模糊变换,就可得到融合后的诊断结果Y=(y1,y2,…,yn),即融合后的各故障决策的可能性集合。
最后,对各故障决策的可能性集合按照一定的权重进行选择,得出最优结果。对故障进行决策时,采用基于规则的方法,基本原则有[2]:
①判定的决策目标应具有最大的隶属度值。
②判定的决策目标的隶属度值要大于某一阈值,具体数值要视实际问题而定。
③判定的决策目标和其他目标的隶属度值之差要大于某个门限。
4 算法实现
路灯电缆防盗监测系统控制器采用飞思卡尔公司的MC9S08AW60单片机,编程软件使用CodeWarrior forHC08 v5.1,模糊数据融合故障诊断算法流程如图2所示。首先根据电缆通电状态选择出所需要的传感器,对相应的数据进行模糊化处理,建立关系矩阵,查表取得各传感器的权重向量,与建立的关系矩阵做乘法运算,得到诊断隶属度结果矩阵,最后根据故障判断原则得到系统最终故障结果。
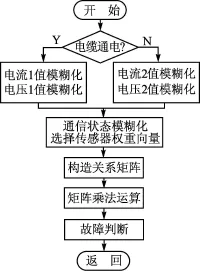
图2 算法流程
5 实验结果分析
下面以路灯防盗监测系统不通交流电时为例进行实验数据分析。系统测量的参数有电流值、电压值和通信状态,因此取传感器集合为{电压传感器,电流传感器,通信状态传感器}。预判定的状态有4种,取状态集合为{电缆正常,电缆短路,通信失败,电缆剪断}。根据经验,取传感器权值集合{0.2,0.4,0.4}。表1给出了通信状态传感器对应的模糊化表,同样电压值和电流值也具有相应的模糊化表,这里不一一列举。

表1 通信状态模糊化表
将各传感器测得的参数按照模糊化表得到各子模糊集后,构造关系矩阵R。表2为不同参数融合后各故障的置信度值,根据故障判定规则可以准确判断出系统的故障类型。路灯在开灯时启动电流很大,所以在路灯启动的一小段时间内,如果调整传感器的权重,能得到更好的效果。
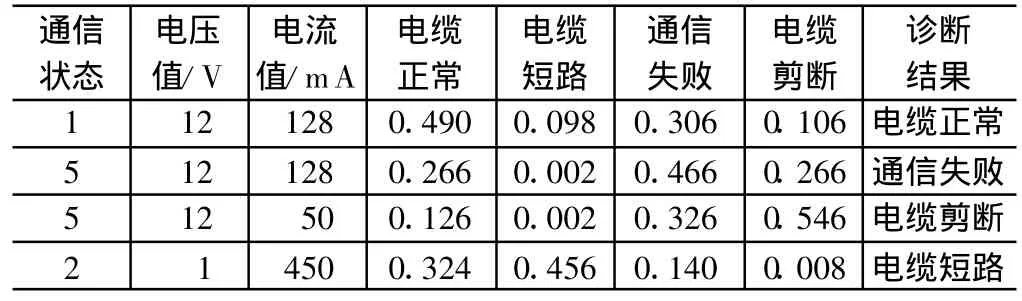
表2 故障诊断表
结 语
将多传感器模糊数据融合技术的故障诊断方法应用于路灯电缆防盗监测系统中,充分利用了来自不同传感器的多元信息的互补性,使系统具有更高的故障诊断准确性。这种方法的不完善之处自于,数据的模糊化、传感器的权重分配还没有形成理论,需要根据实验数据和经验进行设置。
[1]孙文义.路灯电缆防盗监测系统研究与设计[D].秦皇岛:燕山大学,2009.
[2]朱大奇,刘永安.故障诊断的信息融合方法[J].控制与决策,2007(12):1321-1325.
[3]M a Ping,Du Hailian,Niu Yuguang,et al.Actuator Fault Diagnosis in Control System Based on Data Fusion.Intelligent Control and Automation:Sixth World Congress on Intelligent Control and Automation,Dalian,2006[C].Piscataway:IEEE,2006(2):5791-5795.
[4]童树鸿,沈毅,刘志言.数据融合的模糊模型和算法研究[J].哈尔滨工业大学学报,2002,34(1).
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
一重技术(2021年5期)2022-01-18
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
启蒙(3-7岁)(2018年12期)2018-12-13
电子制作(2018年10期)2018-08-04
小学阅读指南·低年级版(2017年11期)2017-12-06
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
振动、测试与诊断(2014年5期)2014-03-01