
火星进入、下降与着陆技术的新进展——以“火星科学实验室”为例
2010-06-11 01:52彭玉明满益云
航天返回与遥感 2010年4期
彭玉明 李 爽 满益云 徐 波
(1 南京航空航天大学 航天学院,南京210016)
(2 北京空间机电研究所,北京100076)
1 引言
近年来,随着航天技术的不断发展,人类逐渐把目光转向外太空。火星作为距离地球最近的行星之一、且与地球有很多相似之处,成为人类深空探测的首选目标星体。目前世界各航天大国都在积极开展火星探测,美国、欧洲、俄罗斯、印度等国均已宣布了各自的火星探测或月球探测计划,中国也在有条不紊地推进自己的火星探测。
目前有多个火星探测任务在紧锣密鼓的准备当中,其中比较有代表性的是NASA计划2011年发射的“火星科学实验室”(Mars Science Laboratory,MSL),其主要任务是分析火星土壤和岩石的有机成分,收集火星地表、大气环境数据,寻找是否有生命存在的迹象。“火星科学实验室”是人类开展火星探测以来着陆质量最大、高程最高的探测器,它将首次采用“阿波罗”飞船式的进入制导、新颖的“空中吊车(Sky Crane)”着陆方式以及复杂的轨迹、姿态制导控制系统。
美国从20世纪70年代开始进行了多次火星探测活动,掌握了大量火星表面大气、环境数据,积累了丰富经验。因此详细了解“火星科学实验室”的任务目标以及导航、制导与控制技术方案有助于我国火星探测计划的实施。
2 任务需求与挑战
2.1 任务需求
自从2004年“勇气号”、“机遇号”取得巨大成功后,为了更深入研究火星环境、寻找是否有生命存在,NASA开始着手研究着陆质量更大,探索范围更广,使用寿命更长的探测器。根据已公布的设计方案,“火星科学实验室”将采用核动力提供能量,携带10余种科学仪器,能够攀爬60°的斜坡,活动范围达20km,因此其质量和体积都比以前的探测器大得多,有效载荷达到850kg,进入质量更是超过3 000kg。“火星科学实验室”继承了“海盗号”的70°圆锥气动外形和升力体构型,由防热罩、火星车、下降平台、后挡板、巡航平台5部分构成,见图1。“火星科学实验室”对着陆高度和精度的要求比以往任何任务都要高的多。表1和表2中的数据说明着陆高度与精度对着陆区(点)的选择有很大影响。高度在0km(火星轨道器激光测高,下同)以下的区域只占火星表面积的 51%,而2km以下的却达到90%,面积的增大意味着可供选择的着陆点个数也越多;同时,着陆误差也影响着着陆点个数,着陆误差越大,可供选择的着陆点越少[1-2],而且从安全性的角度考虑,着陆精度越高越好。因此,为了尽可能地扩大探索区域,“火星科学实验室”对着陆精度和高度要求大幅度提高,要求着陆极限偏差不超过10km,着陆高度不低于2km。
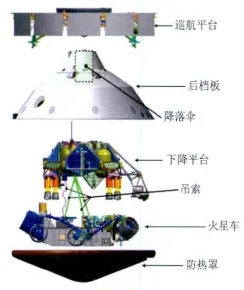
图1 “火星科学实验室”组成部分

表1 着陆点高度对可供选择的着陆器区的影响
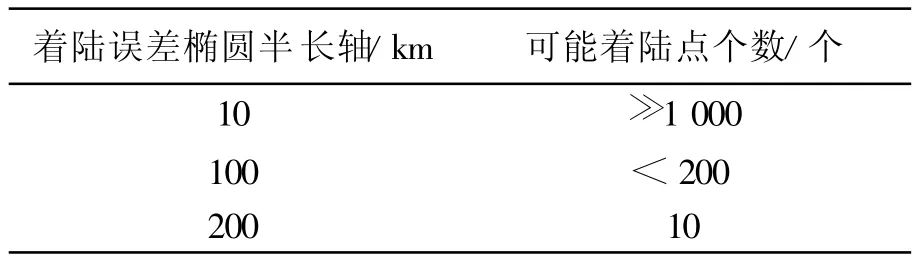
表2 着陆误差对可供选择的着陆点的影响
2.2 主要技术难点
火星进入、下降和着陆(Entry,Descent and Landing,EDL)时间虽然很短,却是整个任务最危险、最重要的环节。迄今为止,世界各国已经进行39次火星探测,其中15次有着陆任务,仅有7次任务着陆成功。“火星科学实验室”虽然继承了一些成熟技术,但是它比以往的任务要求更高,系统更复杂,因此仍然有许多技术难题需要解决。
表3是历次火星探测飞行任务相关参数的对比分析,其中,“火星科学实验室”进入质量大,弹道系数超过110,着陆高度更是达到2 km,这对减速伞和降落伞的气动减速性能提出了极大挑战。由于火星大气密度低,仅仅依靠探测器的气动外形难以使其减速到亚声速状态,降落伞需要在超声速、低密度条件下打开。“火星科学实验室”的降落伞直径增加到21.5m,开伞速度Ma=2.2,动压750Pa,接近降落伞使用极限,对降落伞的强度与飞行性能要求非常高。虽然采用新型尼龙、涤纶、凯夫拉等材料可以解决强度问题,但是速度Ma>1.5时,降落伞的不稳定现象至今仍无法有效的加以解决[3]。

表3 历次火星探测任务飞行参数对比分析
实现高精度着陆是当前火星探测亟待解决的技术难题之一。火星环境非常复杂,包含很多不确定性因素,如大气密度、风速、声速等环境参数都会随季节、气候的不同不断变化,而且其分布与高度有关,例如在20~30km处大气密度的不确定性是影响探测器的主要因素,而在火星表面0~10km高度水平方向的风是主要的不确定性因素。表4列举了一部分火星进入过程中涉及到的不确定性因素。另外,经过长时间飞行,一些探测器参数如质量、转动惯量、质心等也会发生变化[4]。进入段探测器速度高、状态变化快、不确定性因素多,无制导的弹道式进入根本无法满足10km着陆精度要求。

表4 火星进入不同高度所对应的不确定性因素
安全可靠的着陆缓冲方式是着陆成功的关键。目前,成功应用的着陆缓冲方案主要有两种:缓冲支腿和缓冲气囊,缓冲支腿方式曾多次应用在月球、火星着陆探测器上,技术较为成熟可靠,可以承受较大质量,配合导航、制导控制系统可以实现比较高的着陆精度。但是对着陆点的地形要求高,不能有大的岩石或斜坡,而且为了避免发动机尾流影响要提前关机,着陆速度比较大。另一种是“勇气号”和“机遇号”上采用的缓冲气囊,这种方式虽然简化了着陆系统,但是其有效载荷质量比较小,受到结构和材料的限制,没有办法应用到大型火星探测器上;同时,这种着陆方式的着陆精度比较低。“火星科学实验室”以及未来的火星着陆任务都要求比较大的有效载荷质量和较高的着陆精度,因此,必须采用缓冲支腿构型的着陆器。
3 “火星科学实验室”导航、制导与控制技术
“火星科学实验室”继承了已有的成熟技术,如70°圆锥气动外形、盘-缝-带降落伞、升力式构型、变推力发动机等,并在此基础上针对遇到的新问题研究开发了一些新技术,如进入升力控制和空中吊车着陆方式等。“火星科学实验室”整个EDL过程如图2所示。
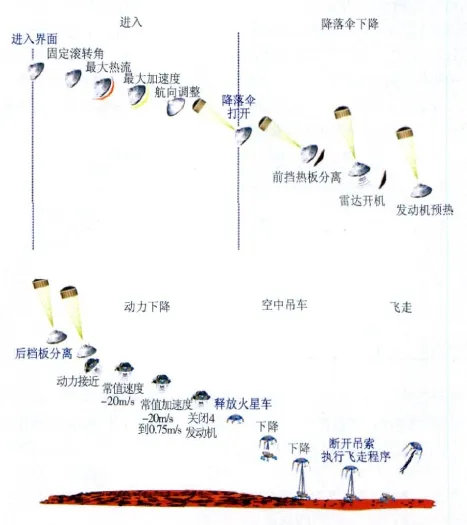
图2 “火星科学实验室”EDL过程示意图
3.1 进入段
进入段是不确定性因素最多、状态变化最快、气动环境最复杂、对着陆精度影响最大的阶段,因此要实现精确着陆任务,高精度的导航制导控制系统是必不可少的。由于此时挡热板尚未抛离,加之存在较大的通信延迟,所以只能通过惯性测量单元进行航位递推,初始位置、姿态等状态信息由深空网和星敏感器确定。未来采样返回与载人登陆等任务要求着陆误差不超过1km,对进入段导航精度的要求势必会更高,仅仅依靠惯性测量单元已经无法满足要求,因此必须研究开发新的自主导航方法,利用火星轨道上潜在的或已有的导航信标资源进行辅助导航是可能的解决方案。
“火星科学实验室”采用升力式构型设计,见图3。进入前通过弹出配平质量,使质心偏离中心,在进入段以配平攻角状态飞行(图3中的α为功角),Ma=25时,升阻比约为0.24。“火星科学实验室”首次采用进入制导,通过控制滚转角改变升力方向以达到控制飞行轨迹的目的。采用升力式构型是因为这样不但可以增加轨迹控制能力,提高着陆精度,而且可以使进入轨迹更加平缓,提高气动减速性能,降低对热防护系统的要求[5]。图4中所示为历次火星任务进入段的速度—高度曲线。从图中可以看到“火星科学实验室”相对于其他的探测器飞行高度更低,由于高度低,大气密度大,所以阻力和升力都较大,气动减速性能和轨迹控制能力都有所提高。
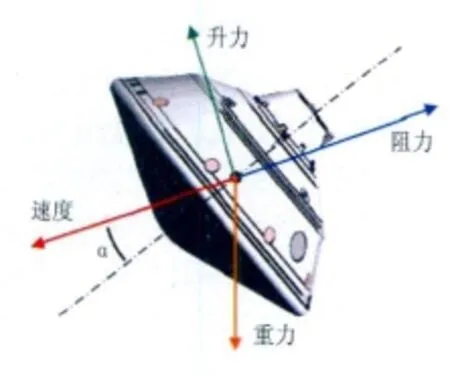
图3 升力式构形设计

图4 历次任务进入段速度—高度曲线对比
“火星科学实验室”采用“阿波罗”式的进入制导,整个控制过程可以分为3个阶段:1)首先,进入大气阶段。进入大气层时,由于大气密度很低,气动阻力小,控制能力弱,控制效果不好,为了节省燃料一般固定滚转角不变。这一阶段速度变化很小,高度下降却很快,见图4。2)随着高度的不断下降,气动阻力不断增大,当阻力加速度达到1m/s2时进入航程控制阶段。该阶段的主要目的是消除预测航程误差。控制探测器飞到预定开伞点,为了简化控制系统,纵向运动和侧向运动需分开控制。纵向控制滚转角大小使探测器跟踪标称轨迹,消除航程误差,侧向采用滚转角变号逻辑,当航向角误差超出漏斗形的边界时改变滚转角符号。3)最后,是航向调整阶段,此时探测器已经接近预定开伞点,滚转角变化对航程影响不大,因此不再控制航程,而是最小化侧向误差,使探测器飞向预定开伞点[6-7]。由于采用的是标准轨迹跟踪法,初始状态误差和不确定性扰动是影响制导精度的关键因素之一,另外,控制能力弱也是影响着陆精度的主要原因,因此,在设计制导与控制系统时需着重考虑系统抗扰动性能。
探测器的姿态控制是由对称分布在后挡板的反作用姿控发动机实现的,其布局如图5、图6所示。这些发动机是常推力的,依靠方向相反的4组发动机的开与关控制姿态力矩。在进入段起到轨迹控制作用的主要是滚转通道,通过改变滚转角控制升力方向,俯仰和偏航通道通常用来控制攻角和侧滑角在一定范围,使探测器可以在配平攻角状态下飞行。

图5 姿控发动机布局

图6 发动机布局
3.2 降落伞下降段
降落伞下降段的难点在于低密度、超声速条件下的开伞技术。降落伞在超声速条件下存在开伞困难、开伞不稳定、阻力系数下降等问题。“火星科学实验室”虽然沿用了曾多次使用的盘-缝-带降落伞,但是它的直径更大,开伞速度马赫数更高。试验中发现当速度Ma>1.5时,降落伞会出现不稳定现象,这与降落伞直径、伞绳长度、伞型有直接关系。表5列举了NASA进行的降落伞投放试验和实际飞行数据[7]。

表5 降落伞投放试验数据
挡热板分离以后,探测器上携带的导航设备陆续开机工作。“火星科学实验室”携带了多普勒雷达速度计和倾斜雷达高度计,实时测量3个轴向速度和高度,可与惯性测量单元进行组合导航。但是由于降落伞下降阶段探测器姿态变化剧烈、距地面的高度较高,再加上地形的影响,导致测量精度不高。下一代火星探测器不但要具备精确着陆能力,还必须能够自主检测障碍,并进行相应的规避机动,因此光学导航相机、激光雷达等障碍检测传感器是必不可少的,这些传感器在提供火星表面地形信息的时候,也带来大量导航信息。目前,降落伞下降阶段还不具备制导控制能力,因此有学者提出采用可控翼伞,增加一定的轨迹机动能力,配合水平反冲发动机实现可控下降[8]。
3.3 动力下降段
当高度下降到1 500~2 000m,速度100m/s左右时后挡板分离,制动发动机点火开始动力下降。动力下降段状态变化比较平缓,导航测量信息多且精度较高,影响着陆精度的主要是制导控制精度。“火星科学实验室”沿用了“阿波罗”登月舱的多项式制导方法,通过多项式拟合出一条加速度曲线,调整姿态与推力跟踪加速度曲线。两者不同的是“阿波罗”登月舱是有人的,可以识别障碍并进行相应的规避机动,而“火星科学实验室”目前还不具备自主障碍检测规避能力。
整个动力下降过程可以划分为3个阶段:动力接近段、常值速度段、常值加速度段。
1)动力接近段主要是为了减小下降速度,消除水平速度。
2)探测器沿着预先规划好的轨迹运动到着陆点上空100m处,然后开始以20m/s的常值速度垂直下降,保持固定速度是为了消除高度测量误差,因为在挡热板分离以后探测器上雷达虽然开机工作了,但是在降落伞下降阶段和动力接近段探测器高度较高,测量精度较差。
3)当高度下降到50m左右时开始以常值加速度下降,下降速度由20m/s减小到0.75m/s,此时探测器距离火星表面约21m,关闭4台制动发动机开始“空中吊车”着陆。
动力下降段的姿态与发动机控制至关重要,直接影响到能否成功着陆。“火星科学实验室”的动力下降系统由8个推力范围从400~3 000N的变推力发动机组成[5]。推力方向与探测器垂直轴线方向呈一定夹角,这样布置是为了消除发动机气流吹起的岩石灰尘等对火星车和下降传感器的影响,同时还可以起到姿态控制的作用。“火星科学实验室”总共携带390kg燃料,其中大部分消耗在动力下降段,表6中列出了动力下降段各阶段燃料消耗情况[7,9]。

表6 各阶段燃料消耗统计数据
3.4 “空中吊车”着陆方案
“火星科学实验室”采用了不同于以往的着陆缓冲方案——“空中吊车”着陆方式。着陆操作开始后下降平台保持0.75m/s的下降速度,同时以0.75m/s的速度释放吊索和火星车,整个吊索全长7.5m。当吊索全部释放以后,继续保持0.75m/s的下降速度直到火星车着陆,然后断开吊索,下降平台垂直上升一段时间改变姿态启动全部发动机飞走[6-8],具体过程见图2。这种着陆方式可以保证火星车不受发动机气流影响,不需要像“凤凰号”那样提前关闭制动发动机,也不需要设计复杂的缓冲吸能装置,使着陆有效载荷的质量进一步得到提高,见图7。火星车着陆依靠6个轮子进行缓冲,着陆速度小,着陆安全性好,可以在坡度不超过15°、岩石高度不超过0.55m的复杂地形着陆[4],见图8。

图7 “凤凰号“和“火星科学实验室”的着陆器

图8 发动机气流影响
4 结束语
进入、下降与着陆技术是火星探测的核心技术之一,对整个火星探测活动的顺利进行起着不可替代的作用。“火星科学实验室”着陆质量更大,着陆精度和安全性要求更高,系统更复杂,对导航制导与控制技术提出了更高的要求。“火星科学实验室”在继承已有成熟技术基础之上,开创性地运用了一些新技术新方法,如进入制导、动力下降、空中吊车着陆等。随着火星探测的不断深入,未来采样返回、载人登陆等任务还需要探测器具备精确着陆和自主障碍检测与规避能力,火星进入、下降与着陆技术还有待进一步的发展。
[1]Lockwood M K,Cianciola A D,Dyakonov A,et al.MSL EDL Performance and Environ-ments[R].NASA-20070014674,2005.
[2]Umland J W.Mars Science Laboratory Overview&MSL EDL Challenges[R].NASA-20070014639,2005.
[3]Witkowski A,KandisM.Inflation Characteristics of the MSL Disk Gap Band Parachute[C].20th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar,Seattle,Washington,2009.
[4]Prakash R,Burkhart P D,Chen A,et al.Mars Science Laboratory Entry,Descent,and Landing System Overview[C].IEEE Aerospace Conference Proceedings,2008.
[5]Schoenenberger M,Dyakonov A,Buning P.Aerodynamic Challenges for the Mars Science Laboratory Entry Descent and Landing[C].41st AIAA Thermophysics Conference,SanAnto-nio,Texas,June 22-25,2009.
[6]Mitcheltree R,Steltzner A,Chen A,et al.MarsScience Laboratory Entry Descent and Landing System Verification and ValidationProgram[C].IEEE Aerospace Conference,2008.
[7]Way D W,Powell R W,Chen A,et al.Mars Science Laboratory:Entry,Descent,and Landing System Performance[C].IEEE Aerospace Conference,Big Sky,MT,2006:1467-1501.
[8]Birge BK.A Computational Intelligence Approach to the Mars PrecisionLanding Problem[D].Raleigh,North Carolina:NorthCarolina State University,2008.
[9]Steltzner A,Kipp D,Chen A,et al.Mars Science Laboratory Entry,Descent,and Landing System[C].IEEE Aerospace Conference,2006.
猜你喜欢
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
小学科学(2019年12期)2019-01-06
小溪流(画刊)(2017年11期)2018-01-09
创新作文(1-2年级)(2016年12期)2016-12-26
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
高中生·青春励志(2014年11期)2014-11-25
太空探索(2014年1期)2014-07-10
