
基于分类数据样本的交通事件检测
2010-06-06 04:49童仁宏吕智林张建义韩晓冬
黑龙江交通科技 2010年7期
童仁宏,吕智林,张建义,韩晓冬
(1.广西大学电气工程学院;2.河南有线电视网络集团有限公司郑州分公司)
1 引 言
高速公路的事件检测研究是高速公路交通控制研究的一个主要领域。交通事件检测是交通事件管理过程的第一步,也是其核心和关键。任何事件管理系统的快速反应能力都在很大程度上依赖于高效、可靠的事件检测技术。尽早的事件检测对于制定恰当的响应策略,控制和引导其它车辆避开事发地点,从而使事件总的影响程度降到最低都非常重要。事件检测不但对于事件管理本身意义重大,而且对于智能交通的其它子系统也有重要作用。
交通事件检测系统自 20世纪 60年代发展起来以后,形成了各种各样的检测方法和技术。事件检测算法大的方面包括人工检测方法和自动检测方法,自动检测方法又分直接检测和间接检测方法。间接方法又分为基于模式识别的算法、基于统计理论的算法、基于交通流模型的算法、基于人工智能的算法和基于小波分析的算法。这些算法主要有加里福利亚算法、莫尼卡算法、指数平滑算法、非参数回归算法、卡尔曼滤波算法、贝叶斯算法、麦克马斯特算法、模糊逻辑算法、人工神经网络算法、小波分析算法。这些算法无一例外的用到了实时的交通数据参数,有的是原始采集的数据,有的则是经过简单处理后得到的上下游之间数据差值。但是都没有将交叉口数据与直行路段数据区别开来,检测率也没能达到 100%,有的甚至低于 90%。本文针对这种情况提出将数据样本分为入口处数据样本、出口处数据样本和直行路段数据样本共 3类数据样本以提高算法的检测性能。
2 仿真数据
由于实测数据获取比较困难,通过仿真模型以获取仿真数据。实验模型是采用目前比较通用的由 MarkosPaPageorgiou提出的宏观交通流动动态模型。模拟的单向交通路段如图 1所示。箭头方向表示车流方向。数字 0-9表示检测器的位置,每个检测器间隔 500m。路段共有两个入口和两个出口。以国家二级高速公路作为道路假设条件,参照《道路通行能力手册》和《道路通行能力分析》标准设置初始时刻的车流密度和速度以及事件发生时的干扰参数,选取的检测参数是下游检测器与上游检测器之间的密度差值和速度差值共两个参数。通过仿真分别得到上下游检测器之间的密度差值和速度差值各 500个,同一位置和时刻的密度差值和速度差值为 1组,得到 500组数据作为数据样本。

图 1 模拟的交通路段
3 仿真实验
采用的检测算法是朴素贝叶斯算法。贝叶斯分类方法是数据挖掘众多分类预测型方法中的一种。它的学习机制是利用先验概率和样本信息来计算后验概率以得出结论。以道路仿真模拟得到的 500组数据作为数据样本,利用数据挖掘的 k-均值聚类方法将数据样本里的密度差值和速度差值分别划分到 6个区间里,再计算在每个区间里发生事件的概率,这样就得到了具体数据的先验概率。贝叶斯分类就是在已知数据样本和数据先验概率的情况下求新的数据对象最大的后验概率。当用朴素贝叶斯分类时,认为密度差值和速度差值是相互独立的。表 2列出是采用 3组互不相同的测试数据得到的检测结果。实验表明检测模型的检测率达到了 100%,但是误报率还没有达到理想效果。为此本文提出将数据样本按照数据发生的位置分为入口处数据、出口处数据和直行路段数据 3类。
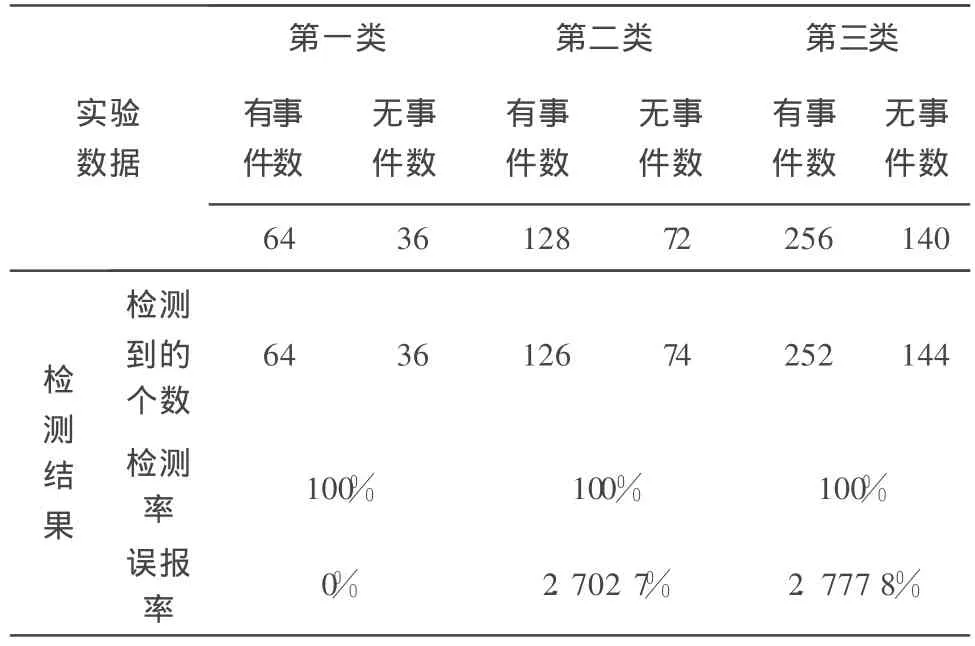
表1 数据样本分类前的实验结果
4 数据样本分类的理论依据
在实际道路上交叉口的交通量变化较大,即使没有交通事件发生时交叉口前后的数据差值也可能发生较大变化。而当直行路段发生交通事件时测得的密度差值和数据差值肯定会发生较大变化。这样两种数据就可能相同,从而影响了具体数据的先验概率最终会影响检测结果。而实验得出的模拟数据也表明了这一点。图 2列出的是本文使用的500组仿真数据里的一部分密度差值数据。横轴是图 1中数据位置的转换位置,图 2中的 1表示图 1中位置 2的密度数据与位置 1的密度数据之差所得数值的位置,其余数字含义依次类推,纵轴表示与转换位置相对应的数据差值。其中5位置的数据是位于入口处前后无事件时密度差值(即图 1中 6位置检测器与5位置检测器没有事件发生时的密度之差),2和 7位置的数据是位于出口处前后的无事件时密度差值,其余位置均为直行路段有事件时的密度差值。从图中可以看出 3、4、5、8位置都有部分数值位于 4~6之间,这就说明了因为位置不同有事件数据与无事件数据在 4~6之间发生了重合。贝叶斯分类的一个重要依据是不同数值所代表的先验概率是不同的,即不同的密度差值表示事件发生的概率不同。当有事件发生时的数据与无事件发生时的数据相同后,该数据表示事件发生的概率就变得不确定,这肯定会影响了事件判断的最后结果。因此本文提出将数据按照出现的位置将数据分 3种:入口处数据、出口处数据和直行路段数据。这样就避免了交叉口数据与直行路数据之间的影响。
5 分类后的实验结果
在对数据库进行分类后可看出分类后的检测率没变都是 100%,但是误报率却随着数据的增加而大大降低,最终达到了 0%,这也是最理想的检测效果。从而证明了将数据样本根据数据的位置分成入口处、出口处和直行路段以后能够成功地提高事件检测率和降低事件误报率。
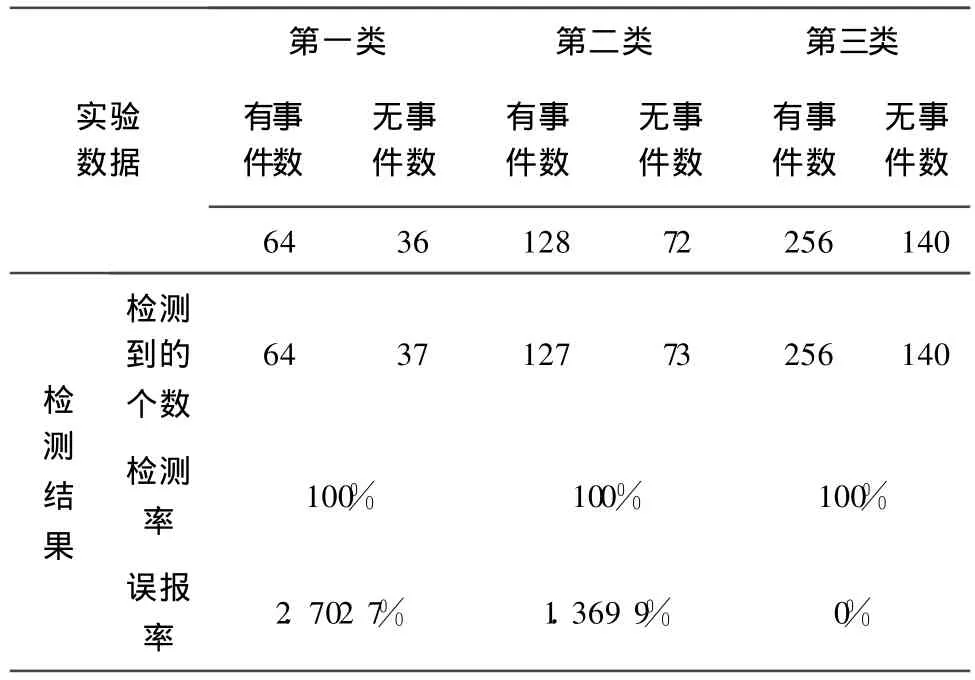
表2 数据样本分类后的实验结果
[1]温惠敏,杨兆升.交通事件检测技术的进展研究[J].交通运输系统工程与信息学报,2005,5(1):26-28.
[2]史忠科等.交通控制系统导论[M].北京:科学出版社,2003.
[3]张敬磊,王晓原.交通事件检测算法研究进展[J].武汉理工大学学报.2005,29,(2):215-218.
[4]任福田等.道路通行能力手册[M].人民交通出版社,2007.
[5]袁方等.对 k-means算法的改进[J].计算机工程与应用,2004,36(2):177.
[6]李雄飞,李军等 .数据挖掘与知识发现[M].北京:高等教育出版社,2003.
[7]陈宽明等.道路通行能力分析[M].人民交通出版社,2007.
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
童话世界(2020年32期)2020-12-25
高师理科学刊(2020年2期)2020-11-26
建材发展导向(2019年11期)2019-08-24
小学生导刊(2018年16期)2018-07-02
中成药(2017年6期)2017-06-13
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11
河南科技(2014年14期)2014-02-27
