空间矢量调制的永磁同步电机直接转矩控制
2010-06-06 10:02王斌王跃王兆安
电机与控制学报 2010年6期
王斌, 王跃, 王兆安
(西安交通大学电气工程学院,陕西 西安 710049)
0 引言
永磁同步电机(permanent magnet synchronous machine,PMSM)以其高效性、高转矩惯量比、高能量密度而得到了诸多关注,特别是近年来永磁材料的飞速发展使得永磁电机应用更加广泛。由于较低的制造成本,表贴式永磁同步电机(surface permanet magnet synchronous machine,SPM)的工业应用越来越广泛[1]。
传统的永磁同步电机直接转矩控制(direct torque control,DTC)是基于转矩和定子磁链的滞环控制器的输出和定子磁链位置信号,通过预制的开关表选取合适的电压空间矢量实现的[2-4]。传统直接转矩控制与矢量控制相比,磁链与转矩的脉动较大。而且逆变器的开关频率不恒定,开关频率随转速、负载转矩以及磁链和转矩滞环控制器的滞环宽度的变化而改变[5-6]。目前,已有多种改进型直接转矩控制方案,文献[7]采用改进的空间电压矢量开关表以期选择最合适的电压矢量进而得到更准确的转矩、磁链控制,文献[8-9]引入了模糊逻辑控制器对空间电压矢量的选择条件做了细化。这些方法减小了转矩与磁链的脉动,但由于控制算法依然建立在对有限的8个电压空间矢量进行选择的基础上,不能保证开关频率的恒定。文献[10]引入了多电平逆变器以增加可选电压空间矢量的数量,减小了转矩与磁链的脉动,但需要更多开关器件,使系统硬件结构的复杂性增加。利用空间电压矢量的调制技术可获得更多的、连续变化的电压空间矢量,进而实现对电机磁链、转矩更准确的控制。根据此调制控制思想,文献[11-13]提出了基于空间矢量调制的方法直接转矩方案,这些方案有效地降低了转矩脉动,并使开关频率恒定,但由于比例积分控制器被应用于转矩控制回路中,使转矩的动态响应变慢。
本文提出一种基于空间电压矢量调制(space vector modulation,SVM)的表贴式永磁同步电机新型直接转矩控制方案。该方法可以明显降低磁链与转矩脉动,同时保持开关频率恒定。并能同时精确地补偿磁链参考值与实际值之间的差值以及转矩参考值与实际值之间的差值。因此磁链与转矩实现了无差拍控制,并且转矩的动态响应速度与传统直接转矩控制方案相当。为了验证此方案的有效性,分别针对表贴式永磁同步电机的传统直接转矩控制方案与改进型直接转矩控制方案进行了静态与动态性能的仿真对比。最后在一台表贴式永磁同步电机上进行实验。
1 表贴式永磁电机数学模型
永磁同步电机在随转子永磁体同步旋转的同步旋转d-q坐标系下的数学模型为

式中:np为极对数;Rs为定子电阻;ωr为转子角速度;Vd、Vq与id、iq为定子电压与电流在d-q坐标系下的分量;φd、φq为定子磁链在d-q坐标系下的分量;Ld、Lq为定子电感在d-q坐标系下的分量;φf为转子永磁体磁链幅值;p为微分算子。
对于表贴式永磁同步电机,由于较大的气隙,电枢反应不明显,定子电感在d-q坐标系下的分量相等于矢量控制而言,具有系统鲁棒性强及转矩响应速度较快等优点。但同时直接转矩控制与矢量控制相比也存在一些缺点。令Ld=Lq=Ls,式(1)所示的表贴式永磁同步电机的数学模型可通过式(2)所示的变换式得到其在静止参考α-β坐标系下的表达式为

式中:Vα、Vβ与 iα、iβ为定子电压与电流在 α - β 坐标系下的分量;φα、φβ为定子磁链在α-β坐标系下的分量;Ls为定子电感;δ为定子磁链矢量φs与转子永磁体磁链矢量φf之间的夹角。
2 磁链与转矩无差拍控制
改进型表贴式永磁电机直接转矩控制系统如图1所示。定子参考磁链矢量计算器替代了传统直接转矩控制系统中的滞环比较器和开关表。定子参考磁链矢量计算器被用来计算定子参考磁链矢量,然后定子参考磁链矢量与实际磁链矢量进行比较,并计算应施加到电机上的电压矢量,然后通过空间电压矢量调制模块输出开关状态。

图1 改进型直接转矩控制方案系统框图Fig.1 System diagram of the proposed DTC scheme

图2 定子参考磁链矢量计算框图Fig.2 Block diagram of the reference flux vector calculator model
由电机模型中的转矩方程式(5)可以推导出转矩角的计算式(6)。参考转矩角δ*(k)与实际转矩角δ(k-1)可以表示为

在采样时刻t(k-1)与t(k)时的定子磁链与转子磁链矢量的矢量图如图3所示。
由图3所示的各磁链矢量之间的位置关系,可知定子参考磁链矢量(k)与定子实际磁链矢量φs(k-1)之间的角度差值可以由式(7)计算得到。由于系统的采样周期要远小于电机的机械时间常数,所以式中认为转速ωr在采样周期内不变,即恒为 ωr(k-1)。

图3 在采样时刻t(k-1)与t(k)时的定子磁链与转子磁链矢量的矢量图Fig.3 Vector diagram of the proposed DTC scheme between the sampling time interval t(k-1)and t(k)
Δδ*(k)=δ*(k)-δ(k-1)+ωr(k-1)Ts。(7)定子参考磁链矢量(k)的位置角(k)可以通过式(8)得到。由于定子参考矢量幅值是系统给定的,所以定子参考磁链矢量便可以得到。

表贴式永磁同步电机数学模型的电压方程式(4)离散化后可得

由于在电机正常工作时式(9)中的定子电阻上的压降Rsis(k)要远小于定子端电压,并且考虑到is(k)与is(k-1)的差别较小,因此应施加到电机上的电压矢量可以表示为

由此得到的空间电压矢量便能够同时精确地补偿转矩与磁链误差,实现了转矩与磁链的无差拍控制。电压矢量由空间电压矢量调制模块得到逆变器的开关信号。由于采用了空间矢量调制方法,逆变器的开关频率可以保持恒定。
3 仿真验证
采用Matlab/SIMULINK工具对传统直接转矩控制方案与改进型直接转矩控制方案分别进行了仿真对比。仿真中采用的表贴式永磁电机参数电机参数:额定功率为1 kW;额定电压为220 V;转子磁链为0.22 Wb;定子电阻为0.96 Ω;电机极对数为4;直轴电感为5.25 mH;交轴电感为5.25 mH。
传统直接转矩控制方案与改进型直接转矩控制方案仿真的稳态特性对比如图4和图5所示。

图4 传统直接转矩控制方案下的磁链与转矩波形Fig.4 Estimated stator flux and torque under the basic DTC

图5 改进型直接转矩控制方案下的磁链与转矩波形Fig.5 Estimated stator flux and torque under the proposed DTC
此时电机转速为1000 r/min,参考磁链指令为0.25 Wb,参考转矩指令为10 N·m,在此稳定工作状态下,传统直接转矩控制方案的开关频率约为3kHz,改进型直接转矩控制方案的空间电压矢量调制模块的开关频率也为3kHz。如图4所示,在传统直接转矩控制方案下,磁链脉动与转矩脉动分别为0.03 Wb和5 N·m。然而,在改进型直接转矩控制方案下,磁链脉动与转矩脉动分别为0.01 Wb和1 N·m,如图5所示。对比图4和图5可以发现应用改进型直接转矩控制方案可以较好地抑制传统直接转矩方案中转矩与磁链脉动较大的缺点。
传统直接转矩控制方案与改进型直接转矩控制方案仿真的动态特性对比如图6和图7所示。

图6 传统直接转矩控制方案下的转矩阶跃信号动态响应波形Fig.6 Dynamic response of the basic DTC scheme with step reference torque signal
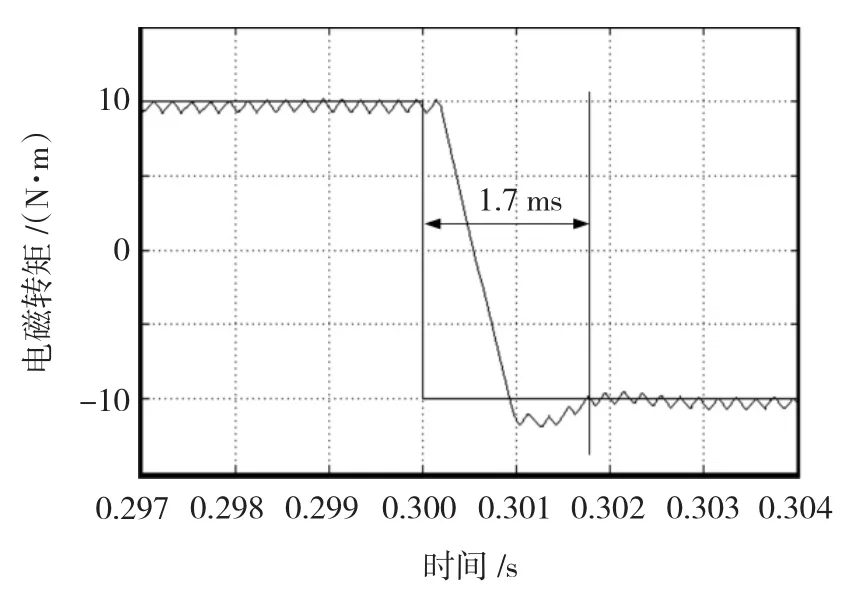
图7 改进型直接转矩控制方案下的转矩阶跃信号动态响应波形Fig.7 Dynamic response of the proposed DTC scheme with step reference torque signal
如图6所示,在传统直接转矩控制方案下,参考转矩指令由10 N·m突降为-10 N·m,实际转矩跟随参考转矩的变化而变化,其动态响应时间约为1.4ms。在改进型直接转矩控制方案下,参考转矩指令由由10 N·m突降为-10 N·m,实际转矩跟随参考转矩的变化而变化,其动态响应时间约为1.7ms。对比图6和图7可以发现应用改进型直接转矩控制方案的转矩响应速度与传统直接转矩控制方案相比变化不大,即改进型的直接转矩控制方案也能实现转矩的快速响应。
4 实验验证
实验中采用TMS320F2812数字信号处理器实现传统直接转矩控制算法和改进型直接转矩控制算法;使用由IGBT器件搭建的逆变器驱动表贴式永磁电机;采用他励直流电机作为负载;采用增量式光电编码器测量电机转速。逆变器直流母线电压为300 V,直流母线电压信号和电机的电流信号由传感器反馈回数字信号处理器。
实验中采用的表贴式永磁电机参数:额定功率为1 kW;额定电压为220 V;转子磁链为0.928 Wb;定子电阻为3.5 Ω;电机极对数为10;直轴电感为30 mH;交轴电感为30 mH。
传统直接转矩控制方案与改进型直接转矩控制方案实验的稳态特性对比如图8和图9所示,此时参考磁链指令都为0.9 Wb,参考转矩指令都为10 N·m。由图8和图9可以发现应用改进型直接转矩控制方案可以较好地抑制传统直接转矩方案中转矩与磁链脉动较大的缺点。
传统直接转矩控制方案与改进型直接转矩控制方案实验的动态特性对比如图10和图11所示。参考转矩指令都由10 N·m突降为-10 N·m,实际转矩跟随参考转矩的变化而变化,其动态响应时间都约为1ms。

图8 参考磁链与估算实际磁链波形Fig.8 Reference and estimated flux signals under the basic DTC

图9 参考转矩与估算的实际转矩波形Fig.9 Reference and estimated torque signals

图10 传统直接转矩控制方案下的参考转矩与估算的实际转矩波形Fig.10 Reference and estimated torque signals under the basic DTC

图11 改进型直接转矩控制方案下的参考转矩与估算的实际转矩波形Fig.11 Reference and estimated torque signals under the proposed DTC
5 结语
本文提出了一种表贴式永磁电机改进型直接转矩控制方案。该方案保持了传统直接转矩控制方案的主要优点,如没有复杂的坐标变换及电流控制环等。该方案实现了转矩与磁链的无差拍控制并采用空间电压矢量调制技术使逆变器的开关频率恒定。仿真和实验表明,该方案相对于传统直接转矩控制方案不仅使磁链脉动与转矩脉动大大降低,而且保持了传统直接转矩控制方案的转矩动态响应的快速性。
[1]王秀和.永磁电机[M].北京:中国电力出版社,2007.
[2]TAKAHASHI I,NOGUCHI T.A new quick-response and high-efficiency control strategy of an induction motor[J].IEEE Transactions on Industry Applications,1986,22(5):820 -827.
[3]ZHONG L,RAHMAN M F,HU W Y,et al.Analysis of direct torque control in permanent magnet synchronous motor drives [J].IEEE Transactions on Power Electronics,1997,12(3):528-536.
[4]田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J].电工技术学报,2002,17(1):7 -11.TIAN Chun,HU Yuwen.Study of the scheme and theory of the direct torque control in permanent magnet synchronous motor drives[J].Transactions of China Electrotechnical Society,2002,17(1):7-11.
[5]KANG J W,SUL S K.Analysis and prediction of inverter switching frequency in direct torque control of induction machine based on hysteresis bands and machine parameters[J].IEEE Transactions on Industrial Electronics,2001,48(3):545 -553.
[6]RAHMAN M F,ZHONG L.Comparison of torque responses of the interior permanent magnet synchronous motor under PWM current and direct torque controIs[C]∥The 25th Annual Conference of the IEEE Industrial Electronics Society,November 29-December 3,1999,San Jose,USA.1999:1464 -1470.
[7]胡虎,李永东.基于区域电压矢量表的交流异步电动机直接转矩预测控制策略研究[J].电工技术学报,2004,19(2):25-30.HU Hu,LI Yongdong.A predictive direct torque control strategies of induction motor based on area voltage vector table[J].Transactions of China Electrotechnical Society,2004,19(2):25-30.
[8]孙丹,贺益康,智大为.基于模糊逻辑的永磁同步电动机直接转矩控制[J].电工技术学报,2003,18(1):33-38.SUN Dan,HE Yikang,ZHI Dawei.Direct torque control of a permanent magnet synchronous motor based on fuzzy logic [J].Transactions of China Electrotechnical Society,2003,18(1):33 -38.
[9]刘军,刘丁,吴浦升,等.基于模糊控制调节电压矢量作用时间策略的永磁同步电机直接转矩控制仿真研究[J].中国电机工程学报,2004,24(10):148-152.LIU Jun,LIU Ding,WU Pusheng,et al.The simulation analysis of permanent magnet synchronous motor based on the strategy of modulating the time of voltage vector[J].Proceedings of the CSEE,200424(10):148-152.
[10]MATINS C A,ROBOAM X,MEYNARD T A,et al.Switching frequency imposition and ripple reduction in DTC drives by using a multilevel convert[J].IEEE Transactions on Power Electronics,2002,17(2):286 -297.
[11]TANG Lixin,ZHONG Limin,RAHMAN M F,et al.A novel direct torque controlled interior permanent magnet synchronous machine drive with low ripple in flux and torque and fixed switching frequency[J].IEEE Transactions on Power Electronics,2004,19(2):346-354.
[12]史涔溦,邱建琪,金孟加,等.永磁同步电动机直接转矩控制方法的比较研究[J]中国电机工程学报,2005,25(16):141-146.SHI Cenwei,QIU Jianqi,JIN Mengjia,et al.Study on the performance of different direct torque control methods for permanent magnet synchronous machines[J].Proceedings of the CSEE,2005,25(16):141-146.
[13]刘军,楚小刚,白华煜.基于参考磁链电压空间矢量调制策略的永磁同步电机直接转矩控制研究[J].电工技术学报,2005,20(6):11 -15.LIU Jun,CHU Xiaogang,BAI Huayu.Study of permanent magnet synchronous motor direct torque control based on the strategy of reference stator flux linkage and voltage space vector modulation[J].Transactions of China Electrotechnical Society,2005,20(6):11-15.
[14]SEBASTIAN T,SLEMON G,RAHMAN M.Modelling of permanent magnet synchronous motors[J].IEEE Transactions on Magnetics,1986,22(5):1069 -1071.
猜你喜欢
一重技术(2021年5期)2022-01-18
防爆电机(2020年6期)2020-12-14
测控技术(2018年4期)2018-11-25
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电机与控制应用(2015年2期)2015-03-01
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年13期)2014-04-04