
三峡库区桥区河段船舶运动模型与仿真研究
2010-06-02 08:01刘元丰杨渡军刘习华
重庆交通大学学报(自然科学版) 2010年1期
刘元丰,杨渡军,陈 禾,刘习华
(重庆交通大学应用技术学院,重庆 400074)
三峡库区桥区河段船舶运动模型与仿真研究
刘元丰,杨渡军,陈 禾,刘习华
(重庆交通大学应用技术学院,重庆 400074)
三峡成库后,库区在建跨河桥梁日渐增多,为避免或减少船桥碰撞事故,从船舶驾驶与避碰的角度,以石忠高速公路忠县长江大桥为研究对象,运用船舶操纵理论,建立船舶在桥区水域受风、流影响偏航数学模型,并通过仿真技术模拟船舶在桥区河段运动航迹,显示船舶通过大桥上下行三维视景,为研究三峡库区跨河桥梁主动防撞提供理论依据。
船舶;桥区河段;运动模型;仿真
三峡大坝的建成极大地促进了长江上游航运事业的发展,一方面库区新增航道68条,并形成以长江干线、嘉陵江、乌江为水运主通道和渠江、小江、大宁河等四级以上的“三主三干”航道为骨架,其它五六级航道为基础,干支相通,通江达海的航道网络,通航条件得到极大的改善,通航能力提高,运输成本降低;另一方面库区原有的航道、水文、气象、助航设施、交通特征、船型、船舶(队)尺度、导航技术、操船技术、航行安全保障技术、安全管理模式等已发生显著变化。尤其是三峡大坝坝前水位的调度,导致库区一年四季水位变幅巨大,最大落差高达40 m,而且随着库区交通运输业的不断发展,库区跨江桥梁越建越多,并受库区地理因素制约,桥墩也将越建越高,其桥梁刚度有向柔性化发展的趋势,与此同时,因库区水位的大幅变化,一些原处于非通航区域的桥墩亦将可能面临被船舶撞击的危险。
为保证桥梁与船舶安全,使船舶在桥区河段的实际运动轨迹与预定航线保持一致,防止船舶受风、流影响产生漂移、偏转撞击桥墩。基于主动防撞的角度,以石忠高速公路忠县长江大桥为研究对象,运用船舶操纵理论,对船舶在风、流影响下的运动轨迹进行量化分析,建立船舶通过库区桥区河段运动数学模型,并运用仿真技术,模拟船舶通过石忠高速公路忠县长江大桥的运动轨迹,找出影响船舶在桥区河段航行产生偏航的原因和规律,为研究船舶通过库区跨河桥梁主动防撞提供理论依据。
1 船舶通过桥区河段运动数学模型
1.1 无风流影响的运动数学模型
建立船舶坐标系统,包括船舶活动坐标系Gxy和固定坐标系o1x1y1[1]。活动坐标系Gxy以船舶重心G为坐标原点,Gx与船首线重合,Gy垂直于Gx;固定坐标系的坐标原点o1设为通航桥孔靠右岸侧主桥墩(6号墩)内沿的中点,x1轴与桥梁轴线垂直并通过通航桥孔的内边缘指向下游,y1轴与桥梁轴线重合并指向左岸。如图1。
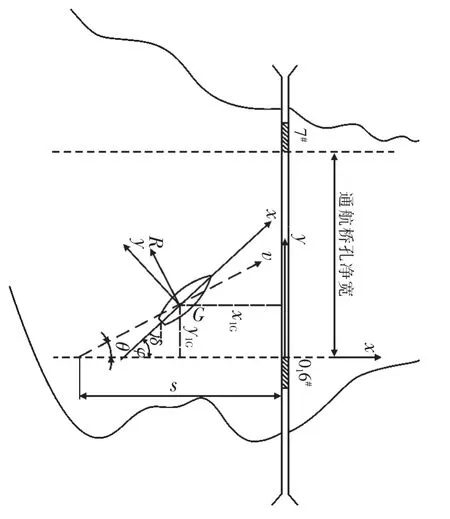
图1 船舶通过桥区河段运动坐标系统Fig.1 The coordinate system of ship through the bridge in the river area
首向角φ为Gx轴与o1x1轴之间的夹角,规定自o1x1转至Gx轴顺时针为正,反之为负;漂角β为重心处航速的方向与Gx轴的夹角,规定自航速转至Gx顺时针方向为正,反之为负;在活动坐标系上的投影为:u=Vcos β ,v=-Vsin β ;航速角 θ为船舶重心G运动轨迹的切线速度与o1x1的夹角,规定自o1x1轴转至航速的方向逆时针为正,反之为负;船舶转动角速度γ=dφ/dt,逆时针方向为正;舵角δ,左舵为正右舵为负[2]。因此,通过上述坐标系,可直接用重心G在固定坐标系o1x1y1中的坐标值的变化来描述船舶运动的轨迹。横坐标为船舶与桥轴线间的距离,纵坐标为船舶相对桥墩的横距,是衡量船舶能否安全过桥的关键。因此,根据上述建立的坐标系就可描述船舶在桥区运动的规律。重心G的坐标表示船位,重心在坐标系中所描绘出的轨迹即为船舶运动轨迹[3]。
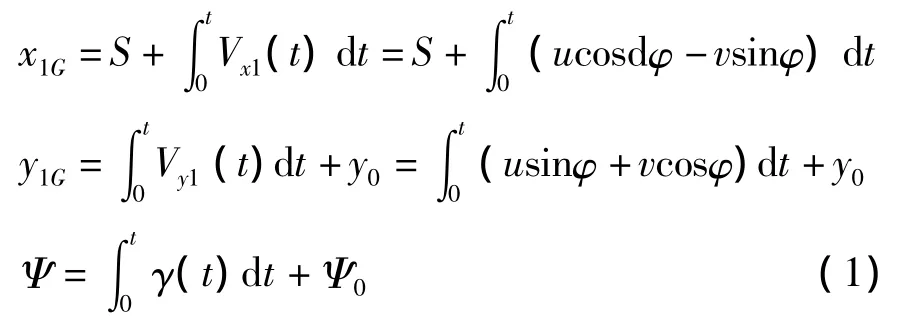
式中:S为船舶在桥区实施过桥方案的起点与桥轴线的垂直距离;y0为船舶实施过桥方案的起点与x1轴的垂直距离;Ψ0为船初始首向角;t为船舶在桥区运动的时间。
1.2 受风、流影响的运动数学模型
风对船舶运动的影响与船型、受风面积、风速、风力以及船舶运动速度等因素有关,且风力的大小

式中:ν2为船舶航行中风致漂移速度,m/s;νa为相对风速,m/s;νs为风中船速,m/s;k为系数一般取0.038 ~0.041;Ba为船体水线下侧面积,m2;L为船体水线面长度,m;d为船舶实际吃水,m
设风速、流速分别为ν2、v3(t),与o1x1轴的夹角分别为λ、α,将ν2、v3(t)分别分解到o1x1方向的分量为v2cosλ、v3cosα,分解到o1y1方向上的分量为 v2sinλ 、v3sinα ,如图2。随时间、空间变化而变化。根据船舶操纵理论,按风致漂移速度的经验公式为[4]:
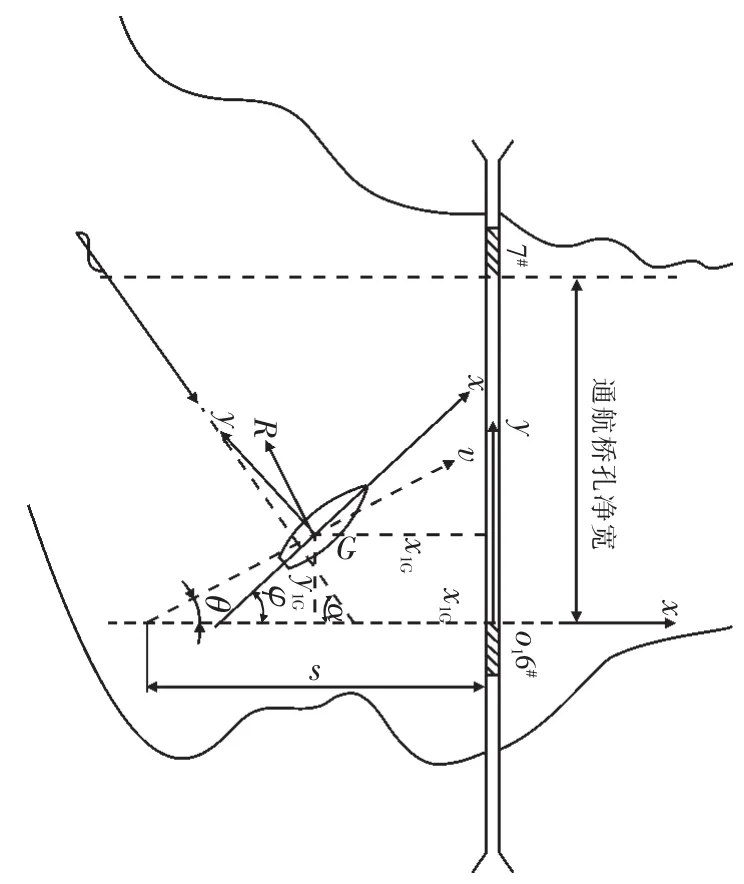
图2 船舶受流影响通过桥区河段桥Fig.2 The effect of ship imposed by the flowthrough the bridge area
将ν3、v2(t)在o1x1、o1y1的分量叠加到式(1)得到船舶受风、流影响的运动数学模型,即:

式中的λ角为风致漂移速度与o1x1轴正方向的夹角,规定自风致漂移速度的方向逆时针为正,反之为负。
2 船舶通过桥区河段运动仿真与分析
2.1 船舶运动仿真流程
仿真系统通过调用上述数学模型即可求得船舶通过桥区河段在不同时间的位置参数值,从而求得精确的船位,模拟出船舶航行的航迹线和三维视景。仿真流程如图3。
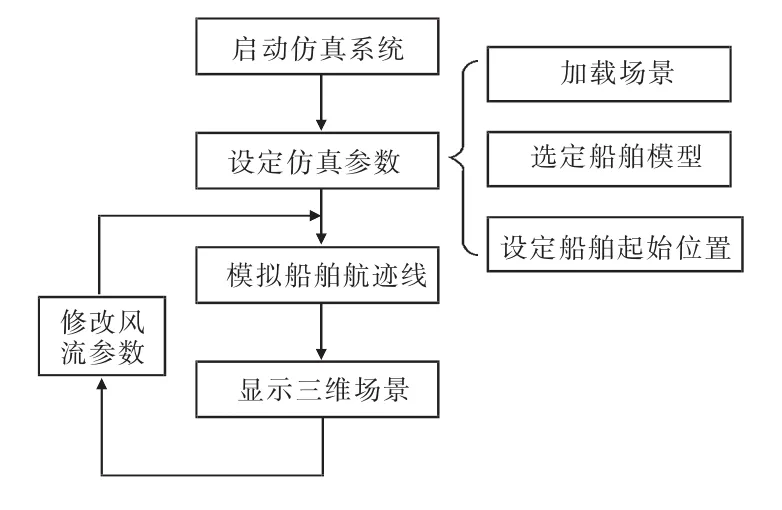
图3 船舶过桥运动仿真流程Fig.3 The simulation process of ship through thebridge in the river area
2.2 大桥及标准化船舶仿真
首先利用CREATOR构建地形的三维模型,其次采集桥区的各种典型建筑物的数据,利用CREATOR构建各种数据模型,完成对场景中的单体建模,为了生成大桥桥区水域的整体三维场景,利用Creator中的外部引用实现单个模型按空间位置的有序的集成场景,并通过GIS技术实现建筑物的精确定位[5-6]。石忠高速公路忠县长江大桥桥区三维场景如图4。
三峡库区船舶模型采用库区标准化集装箱船舶,图5为长70~75 m、宽13.3 m、设计吃水 2.6 ~3.2 m、设计载货量为1 500~2 200 t的集装箱船舶的三维模型。
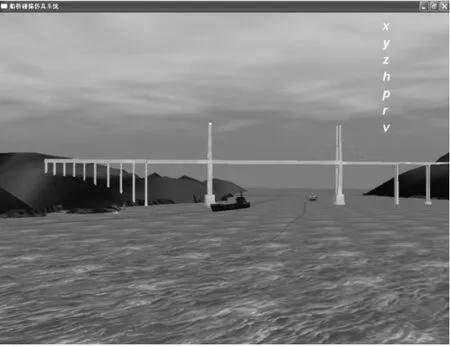
图4 石忠高速公路忠县长江大桥实景三维仿真Fig.4 3D simulation of Shi Zhong County Yangtze River Bridge

图5 集装箱标准化船舶仿真Fig.5 Simulation of standardized container ship
2.3 无风流影响的运动仿真
仿真系统模拟船舶在静水和无风条件下,以船速7 m/s下行和上行通过大桥通航桥孔仿真运动轨迹,如图 6、图 7。

图6 下行船舶过桥运动轨迹Fig.6 The downstream trajectory of ship through the bridge
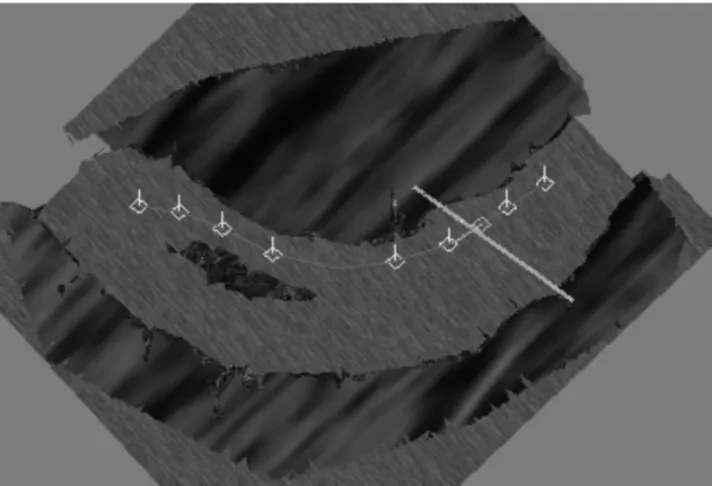
图7 上行船舶过桥运动轨迹Fig.7 The upstream trajectory of ship through the bridge
2.4 受风、流影响的运动仿真
在不同坝前水位下,船舶受风、流影响是不同的,而船舶通过石忠高速公路忠县长江大桥主要受弯道横向分速水流和船舶转向时的横向漂移的影响。例如在坝前水位为156 m时,弯道处横向分速水流约为0.3 m/s,船速8 m/s,通过弯道时间约为6 min,则可以计算出受流影响产生的横向漂移量,同时以经验公式(3)算出在微风条件下行船舶通过大桥的整个时间内(约为12 min)风影响下的横向偏移量,造成船舶撞击大桥6#主桥墩的仿真。如图8、图9。
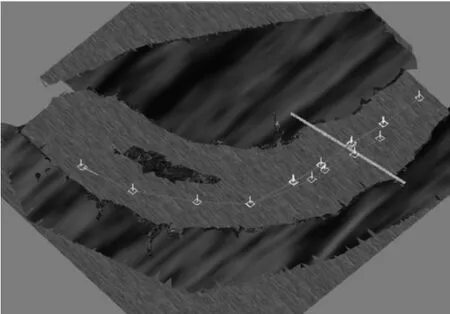
图8 受风流影响船舶过桥偏航运动仿真Fig.8 Simulation of ship yaw affected by the airflow

图9 船舶漂移撞击6号主墩仿真Fig.9 Simulation of ship impact the 6thmain pier
2.4 船舶通过忠县长江大桥仿真视景
船舶在仿真系统中的视景显示,如图10、图11。

图10 下行船舶通过桥梁前视景仿真Fig.10 Visual simulation of the downstream ship near the bridge
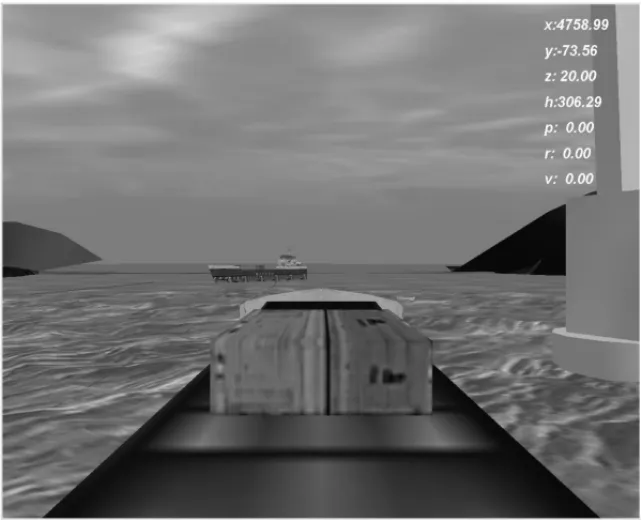
图11 下行船舶通过桥孔时视景仿真Fig.11 Visual simulation of the downstream ship through the bridge
3 仿真结果分析
为确保船舶和桥梁安全,船舶通过石忠高速公路忠县长江大桥时,应注意以下问题:
1)船舶过桥前,对舵设备、锚设备、主辅机设备、船队系缆、拖带设备及应急设备等进行严格检查,保持良好技术状态,并备车航行。
2)在航行过程中,船舶应加强了望,全面了解桥区通航水域航行条件,及早与大桥海事监督站和过往船舶加强联系,准确识别判断通航桥孔位置和船的动态,以便对局面和碰撞危险作出充分估计。
3)以适合当时环境和情况的安全航速行驶,以足够的舵效控制船位。
4)船舶下行时,应根据航道走向和通航桥孔的位置偏右岸侧的状况,随时修正航向,减小流压差,摆正船位,防止船舶受风、流影响产生漂移以及因下行航路与通航桥孔的错位而向6#墩、5#墩漂移相撞。
5)船舶在桥梁水域航行不得追越或并列行驶,不得进行编解队、过驳、抛锚、捕捞等作业。
6)能见度不良时,船舶应加强戒备,谨慎驾驶,直到碰撞危险过去为止。如逆流航行能见距离不足1 000 m,顺流航行能见距离不足1 500 m时,船舶不得通过桥梁水域。
4 结论
船舶能否安全通过库区桥区河段,避免船桥碰撞,受多种因素影响。如船舶航路的选择、航向的确定、航速的大小、能见度的好坏、坝前水位的高低、航标的配备以及风力和风向、流速和流向对船舶偏航的影响等。其中风力和风向、流速和流向是影响船舶偏离航路和航向最主要的原因,并且存在偶然因素。因此,利用数学方法建立船舶在桥区水域受风、流影响运动模型,运用仿真系统,对船舶通过库区桥区河段进行数值仿真模拟,模拟出船舶在桥区水域中的各中航行状况,找出影响船舶偏航的原因和规律,提出正确的船桥避碰操船措施,才能实现主动防撞的目的。
[1] 刘明俊.航道与引航[M].北京:人民交通出版社,1999:169-1176.
[2] 刘明俊.船舶(队)通过黄石大桥引航技术研究[J].航海技术,1999(1):31-34.
[3] 甘浪雄,刘明俊.船舶在桥区运动轨迹的理论与实践探讨[J].交通科技,2003(增刊):42-46.
[4] 陆志材.船舶操纵[M].北京:大连海事大学出版社,2001:70-71.
[5] 吴家铸.视景仿真技术及应用[M].西安:西安电子科技大学出版社,2001:2-256.
[6] Vega Lynx User’s Guide,Version 3.7 for Windows NT and Windows 2000,March 2001 [S].TEXAS:MultiGen-Paradigm Inc:1-150.
Ship Motion Model and Simulation Study in Bridge Navigable Waters of Three Gorges Reservoir Area
LIU Yuan-feng,YANG Du-jun,CHEN He,LIU Xi-hua
After the construction of Three Gorges Reservoir,river-crossing bridges in construction at the reservoir area become more and more.In order to reduce or avoid the ship-bridge collision,the mathematic model of ship’s off-course influenced by the wind and stream in bridge navigable waters is established,from the perspectives of ship driving and collision avoiding.Zhongxian Yangtze River Bridge located in Shi-Zhong highway is taken as the research object and the ship controlling theory is used in this model.And the ship motion track in the bridge navigable waters is simulated by the simulation technology,which shows three-dimensional view of ship getting through the bridge.The proposed mathematic model provides theoretic basis for river-crossing bridges in Three Gorges Reservoir area to take the initiative measures to prevent collision.
ship;bridge navigable waters;motion model;simulation
U676.1;U447
A
1674-0696(2010)01-0138-04
2009-09-07;
2009-09-29
交通运输部西部交通科技建设项目(200631800047)
刘元丰(1963-),男,重庆市人,副教授,主要从事航海技术和水上交通安全研究。E-mail:liuyf131@sina.com。
猜你喜欢
弹箭与制导学报(2022年4期)2022-10-12
今日农业(2021年16期)2021-11-26
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
科学与财富(2018年7期)2018-05-21
水运管理(2016年9期)2016-11-08
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年4期)2014-03-01
火工品(2012年1期)2012-07-07
中国土地科学(2010年9期)2010-03-20
空间控制技术与应用(2009年2期)2009-12-20
