
基于旋量递推的自由漂浮树形空间机器人雅可比矩阵推导
2010-05-30 09:44:48刘云平吴洪涛
中国机械工程 2010年11期
刘云平 吴洪涛
1.南京信息工程大学,南京,210044 2.南京航空航天大学,南京,210016
0 引言
机器人雅可比矩阵的计算方法目前主要有运动学方程对时间求导法、矢量积法、微分变换法、递推法等[1],如文献[2]采用空间算子代数方法对固定基座机器人的雅可比矩阵进行了描述,文献[3]将矢量叉乘变为矢量点乘对冗余度机器人雅可比矩阵进行求解。文献[4]利用旋量来表达雅可比矩阵的计算公式,与微分变换法和矢量叉乘法相比,该表达方法的形式更简单。但是目前的这些方法主要适用于地面固定基座的串联机器人或少自由度的空间平面机器人,对于多自由度且本体与操作臂之间存在着强烈耦合作用的自由漂浮树形空间机器人系统来说,上述方法使得雅可比矩阵的计算过程变得繁琐复杂、计算效率低下,难以由计算机编程实现。因此,本文将自由漂浮的树形空间机器人系统划分为基座固定的地面机器人系统及基座浮动的关节锁定机器人系统两部分进行研究,避免了本体与操作臂之间的耦合过程分析,并引入移位算子[5]来描述系统的拓扑结构及运动学递推关系,该描述方法比传统的关联矩阵、通路矩阵和低序体阵列方法的形式更简单且易于由计算机编程实现,使得雅可比矩阵的计算过程变得简单且效率高。
1 速度旋量的递推
为了节约燃料,自由漂浮树形空间机器人系统的本体位姿控制系统通常处于关闭状态,此时整个系统属于多体系统中的无根树系统,以图1所示的自由漂浮树形空间机器人为例进行分析,O-1 X-1Y-1Z-1为惯性坐标系,O cm X cm Y cm Z cm为质心坐标系。根据空间算子代数理论的标号规则,将整个系统的所有分支链和体进行统一标号。首先对分支链进行标号(图1中的虚线所示),对从直接与本体相连的分支到间接相连的分支按照从大到小进行依次编号。然后对所有的分支按从1到j依次递增的顺序,对每个分支的体按照从末端到根部进行编号。如图1所示,分支1的体编号为1到m1,分支2的体编号为m1+1到m2,……,分支j的体编号为m到n,总共n个体,本体编号为n+1。
如图2所示,取出系统中任意一个分支中任意相邻的两个体,有

式中,Sk为第k个关节点Ok到O-1的向量;lk+1,k为第k+1个关节点Ok+1到第k个关节点Ok的向量。
对式(1)求导得第k体线速度为

角速度为

式中,θ◦k为第k个角的自转角速度;hk为第k个体的转动轴的映射矩阵。

图2 相邻二体
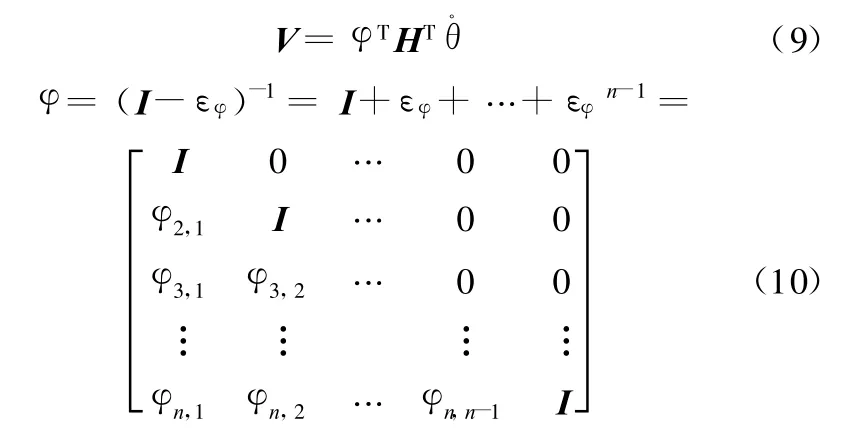
引入六维速度旋量V=col[ω,v],则速度旋量的递推计算表达式为

式中,φk+1,k为移位算子;lk*+1,k为向量lk+1,k的差积矩阵;Hk为第k个关节的状态空间到关节空间的投影算子[2]。
通过式(4)可以得到第k个体的速度旋量V k,根据速度是从本体向外、沿着各个分支链向末端传递的自然本质,Vk不仅与第k个体的自转角速度有关,而且与其直接相连的体传递过来的速度有关。链式系统可以按照自然数的递增对其中的体进行顺序编号,在计算机编程时,通过体号的递增可以找到与其相连的下一个体,不需要再额外提供体之间的关联关系。树形系统中,在分支处相连的两个体的序号不是递增的,因此需要通过拓扑结构描述方法来提供各个体及分支的关联关系和通路情况,传统的方法有罗伯森和维腾堡方法[6]中的关联矩阵和通路矩阵、休斯顿方法中的低序体阵列[7]。但是当系统的分支及体的个数比较大时,传统的这些拓扑结构描述方法变得复杂且所需存储空间大,计算机调用时间长,降低了计算效率。
本文采用直接反映拓扑结构及速度递推关系的父体阵列及移位算子方法,该方法从局部和全局角度描述了系统速度传递的自然本质。速度从本体开始向外传递,在到达第k个体之前经过的所有体称为第k体的祖先体,其中,与该体直接相连的祖先体称为父体(体号标记为Pa(k)),每个体只有一个父体,链式系统中Pa(k)=k+1。在树形系统中,第k体的速度与其父体Pa(k)有关,于是式(4)可以写成如下形式:

定义本体的速度旋量为V n+1,根据式(5)可将V k用本体的速度及其祖先体的角速度表示为

根据式(6),V k可以分成两部分进行分析计算。一部分是当关节角速度(等效为所有关节锁定不动),此时是由本体速度Vn+1传递后得到的;另一部分是当本体速度V n+1=0(等效为基座固定)与其祖先体的关节速度有关。因此,V k可以自然划分为两部分,并可以通过移位算子进行全局分析。
2 全局分析
将系统的有关变量写成总体形式进行分析,令V=col[V1,V2,…,V N]H=diag(H1,H2,…,Hn)。当关节角速度时,有

当V n+1=0时,相当于固定基的地面机器人,即

式中,φx,y为第 x体到第y体的移位算子矩阵。
根据式(8),解得
全局移位算子包含了关联矩阵、通路矩阵和位形关系的描述信息,因此可以通过它直接从整体上分析系统所有体的力和速度的传递关系。这个传递关系在式(5)中以等价的递推形式表示。
因此,系统的全局速度表达为

3 雅可比矩阵
将第k体的动量表达成旋量形式:

其中质量算子

式中,Jk、mk、dk分别表示第k个体的广义惯量矩阵、质量、质心的位矢;˜dk为质心位矢的反对称矩阵。
当系统不受外力时,根据动量守恒
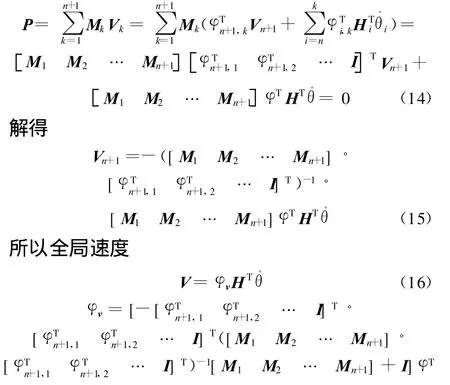
假定末端执行器在第mj个体上,第mj个关节到末端执行器移位算子为φmj,E,则

则雅可比矩阵为

4 实例说明
以图3自由漂浮树形空间机器人系统为例,根据标号原则进行标号,定义父体列阵(表1)。
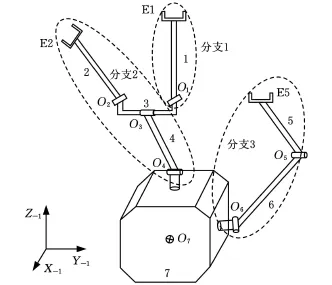
图3 自由漂浮树形空间机器人

表1 父体阵列
7号体是本体,在Pa(k)中没出现的体号属于末端体,如1、2、5号体;重复出现的体号属于分支体 ,如3、7号体。可得到
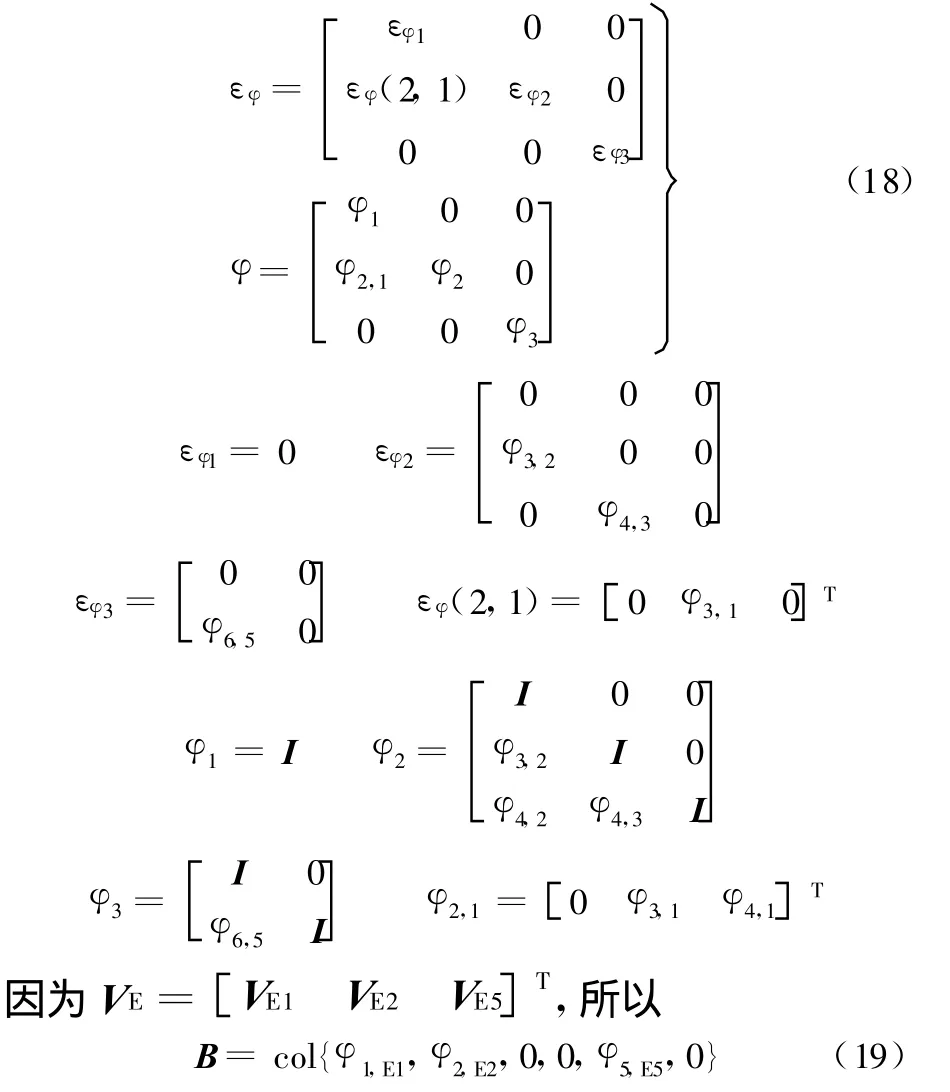
根据式(17)得到本实例的 φv:

根据式(18)可得到本例的雅可比矩阵符号表达式:

式(21)采用的是符号表达式,易于由计算机编程实现。将系统的结构参数直接代入式(21)就得到树形空间机器人的广义雅可比矩阵,避免了数值计算方法中多步计算的误差,提高了计算精度。
5 结束语
本文通过直接反映系统力学特性的父体阵列及移位算子,对系统的拓扑结构及运动学传递关系进行了描述,并在旋量递推的基础上推导了自由漂浮树形空间机器人的雅可比矩阵。将系统自然划分为两部分进行分析,这样可以避免分析本体与操作臂之间复杂的耦合过程,使得计算过程简单、高效,且易于由计算机编程实现。
[1] 熊有伦.机器人学[M].北京:机械工业出版社,1993.
[2] Rodriguez G,Kreutz K,Jain A.A Spatial Operator Algebra for Manipulator Modeling and Control[J].International Journal of Robotics Research,1991,10(4):371-381.
[3] 郭琦,洪炳熔.双臂六自由度空间机器人广义雅可比矩阵的推导[J].电子学报,2005,33(2):322-326.
[4] Richard M,Li Zexiang,Shankar S.A Mathematical Introduction to Robotic Manipulation[M].Boca Raton,Florida,USA:CRC Press,1994.
[5] Jain A,Rodriguez G.Robot Dynamics Using Spatial Operator[C]//Proceedings of the 2000 IEEE International Conference on Robotics&Automation.San Francisco,2000:850-856.
[6] 刘延柱,洪嘉振,扬海兴.多刚体动力学[M].北京:高等教育出版社,1989.
[7] 休斯敦 R L,刘又午.多体系统动力学(下)[M].天津:天津大学出版社,1991.
猜你喜欢
花卉(2024年1期)2024-01-16 11:29:12
河北果树(2022年1期)2022-02-16 00:41:10
高师理科学刊(2020年1期)2020-11-26 05:59:00
佛山科学技术学院学报(自然科学版)(2020年1期)2020-03-12 01:36:52
学生天地(2019年28期)2019-08-25 08:50:54
数学物理学报(2018年1期)2018-03-26 08:16:36
现代园艺(2017年19期)2018-01-19 02:50:30
现代园艺(2017年13期)2018-01-19 02:28:17
组合机床与自动化加工技术(2017年5期)2017-05-25 00:37:45
山西大同大学学报(自然科学版)(2014年3期)2014-01-23 01:56:30
