基于双正弦编码的数字水准测量系统研究
2010-05-14 11:57冯连合
网络安全与数据管理 2010年9期
王 英,冯连合
(天津市神威汽车零部件有限公司技术质量部,天津 300112)
水准测量是指测量相距一定距离的两地高程差。传统光学水准测量采用人工目视读数,该方法存在测量速度慢、读数易受人为影响、作业劳动强度大、精度低、测量数据联机处理不便且难以实现内外作业一体化等缺点。数字水准仪是20世纪90年代初出现的新型几何水准测量仪器[1],具有测量自动化、速度快、精度高和读数客观等优点,是对传统几何水准测量技术的突破,代表了现代水准测量技术的发展方向。然而,由于国外公司的专利垄断,我国在这一技术领域一直呈现空白的局面,因此获得一种具有自主知识产权的数字水准仪迫在眉睫。为了实现数字水准仪的国产化进程,国内各大厂家如南方、北光、苏一光等也积极进行数字水准仪的研究。但是,数字水准仪是集编码技术、光学技术、计算机技术、图像处理技术于一体的高科技产品,技术上有一定难度,目前还没有国内的产品上市。因此,研究和开发国产数字水准仪,对于填补国产数字水准仪的空白,具有十分重要的意义。
1 双正弦条码标尺的编码原理[2]
设 2 个正 弦信 号:ya(x)=Asin(2πx/Ta+φa)+d,yb(x)=Asin(2πx/Tb+φb)+d,对于周期满足 Ta>Tb,其最小公倍数为z=TaTb/(Ta-Tb),2个信号的相位差 Δθ可表示为:

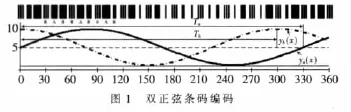
可见,在小于z的长度内,Δθ与 x具有一一对应的关系。 根据采样理论,以间距 ΔL(ΔL>2Ta,ΔL>2Tb)对以上2个信号等间隔采样,以各采样点为中心、采样值为宽度绘制 A、B条码。 设由 ya(x)得到 A码,由 yb(x)得到 B码。为了区分A、B条码,增加一种 R码,由3条等间距相同宽度的黑色码条组成,将它们等间隔交替排列,以确定一个采样周期长度的定位,从而提高标尺读数精度和利于求视距。建立的条码标尺如图1所示,3种码沿着一维方向等间距(ΔL/3)交替排列。以R码中间黑码条中心线为准,每隔ΔL有一组R码重复;每组码右边ΔL/3处有一条A码;在每组R码左边ΔL/3处有一条B码。由上述可知,每2组R码之间的A、B码相位值不存在相同的组合。
测量时,在小于z的长度内,由于A码、B码的变化周期不同,它们在标尺上的组合具有唯一性。只要测出进入CCD视场中某一组A码、B码的条码宽度,再与仪器内存储的基准码相比较,就可确定此处码距标尺底部的高度。然后再求出此处R码距CCD中心线的距离,最后将两者进行加或减运算,就可知道该处到标尺底部的高度。
2 数字水准测量系统的基本原理
数字水准仪的测量系统原理如图2所示。在传统的光学自动安平水准仪的基础上,在望远系统上加装分光镜,水准尺上的编码图像经望远系统、调焦镜和分光镜后分成2路。一路成像在分划板上,通过目镜人工对水准尺进行照准和调焦;另一路在线阵CCD上经光电转换成视频信号,再经放大器和A/D转换器将视频信号转换成数字信号,最后由DSP微处理器根据选定的数字滤波算法和边缘检测算法对采集的数字信号进行编码识别,并将识别出的条码组合与仪器内保存的条码组合参考信号进行比较,从而获得CCD中丝处对应的A、B码组合,最终计算出视距和视线高。采用码宽匹配法是根据编码标尺中任意一组条码宽度的组合与标尺的高度值具有单值性这一特点测量定位的。它在编码时存在A、B码的条码宽度需同时匹配和表征标尺高度的基准设置2个问题,前者需精心选取正弦信号参量,以使相邻条码的宽度值变化明显;后者要求便于几何中心定位,可选A、B码的中心为基准。

测量系统中,CCD器件采用日本东芝公司生产的TCD1206SUP型线阵CCD,该器件灵敏度高、暗电流噪声低,器件自带驱动电路,有 2 160像元,像元尺寸 14 μm×14 μm,采用两相脉冲驱动;A/D转换器选用的是 TI公司生产的10位高速串行逐次逼近型A/D转换器TLV 1572,该器件采用5 V单电压供电,最高采样速率可达1.25 MS/s,可通过多通道缓冲串口 McBSP与 DSP处理器实现无缝连接;DSP微处理器选用TI公司的TMS320VC5502定点运算数字信号处理器,该处理器同C54x系列处理器相比具有更高的性能和更低的功耗,其最高主频可达300 MHz,片内集成 32 K×16 bit的片内RAM、16 K×16 bit的片内 ROM、3个多通道缓冲串口(McBSP)、定时器和32位外部存储器扩展接口(EMIF)等,从而大大简化系统硬件设计电路。为了获得更多的数据信息和调试信息,DSP处理器和PC机之间的数据通信选用MAX232。
3 条码识别
条码识别是正确解码和高精度定位的前提,内容包括各条码宽度的提取,R、A、B码的区分,以及条码中心相对图像中丝位置的定位,可见关键是条码宽度值的提取。条码宽度提取通常基于边缘检测,两边缘之间的距离即是条码宽度。系统中条码图像的边缘检测方法采用基于相邻尺度小波变换乘积的边缘检测方法[3]。对于一维信号,小波变换与尺度之间的关系是[4]:

其中:f(x)为一维信号,|Wjf(x)|是尺度为j的小波变换,C为常数,α为 Lipschitz指数。边缘的α为正常数,噪声的α为负常数。显然,可以根据边缘和噪声随尺度的不同传播特性检测边缘。若把相邻尺度的小波变换相乘即Wjf(x)Wj+1f(x),则有利于增强边缘并抑制噪声。定义一维信号相邻尺度小波变换的乘积为:

Pjf(x)称为尺度为j的归一化尺度积,简称尺度积。
对于离散的CCD数据f(n),上式可表示为:

该方法使信号边缘得到增强,噪声得到抑制,边缘和噪声很好地分离,取单一阈值就可以去除噪声,求得信号边缘。
4 视距和视线高的计算
4.1 视距的计算[5]
标尺条码中的R码是用来求视距的,视距不同,相邻2组R码成像在线阵CCD上的长度不同,测量中只需保证CCD成像区至少有2组R码即可求得视距。其计算公式如下:

式中,P为标尺中 2组R码的间距;L为相邻2组 R码在CCD上的成像长度;N为相邻2组R码在线阵CCD上成像所占的像素个数;f为物镜到CCD的焦距;b为CCD像素宽;D为标尺到物镜的水平距离。
4.2 视线高的计算
假设测量时,标尺在CCD上的条码影像如图3所示。首先根据条码识别算法对十字分划线(CCD中心像元)处的 R、A、B码进行解码,从而获得A、B码宽度以及CCD中心像元上侧紧邻的R码中心对应的像元值。由于任意2组R码之间的A、B码的条码宽度组合具有唯一性,所以将该组条码宽度值与事先存储在仪器中的标尺基准条码宽度值进行比较,即可获得十字分划线下测得的R码中心与标尺底部的距离H。然后根据CCD中心像元与R码中心对应的像元差值、CCD像元尺寸和物像比关系,即可求得R码到 CCD中心的距离 h,最后将 H和h相加,即可获得视线高读数。

5 实验结果
为验证系统设计方案及原理的正确性和可行性,根据现有的实验室条件,在2 m~10 m之间等间隔设置了5个点进行测量实验,每个视距点上连续测量10次,首先对各测量点条码图像中丝处的A、B码组合进行解码,然后计算各点视距和视线高读数的平均值,实验结果如表1所示。
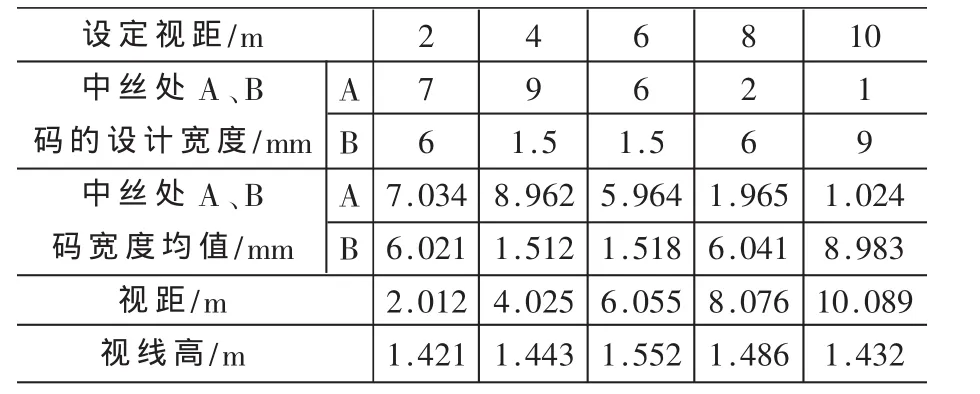
表1 测量实验结果
数字水准仪具有测量速度快、读数客观、精度高、测量数据便于输入计算机和容易实现水准测量内外业一体化等优点,代表了水准仪的发展方向。本文设计的基于DSP的数字水准仪方案及测量试验系统、编码水准尺图像识别算法以及测量读数方法,在实验室条件下进行测量,试验结果表明,该方法合理、可靠。
[1]王明善,肖学年.数字水准仪的原理及误差分析[J].四川测绘,2000,23(4)∶168.
[2]张晓,王志兴,李相银.图像式双正弦条码高程定位方法研究[J].仪器仪表学报,2006,27(7)∶739-742.
[3]李宏贵,李兴国.一种新的基于小波变换的边缘检测方法[J].计 算 机 应 用 与 软 件,2005,22(2)∶103-104.
[4]MUTHUKRISHNAN S.Efficient Algorithms for Document Retrieval Problems.In Proc.ACM-SIAM SODA,2002,657-666.
[5]耿丽清.数字水准仪数据采集与处理系统的研究[D].西安:西安工业学院,2004.
猜你喜欢
今日农业(2021年11期)2021-11-27
仪器仪表用户(2020年11期)2020-11-12
公民与法治(2020年3期)2020-05-30
科学咨询(2020年43期)2020-03-04
上海计量测试(2019年5期)2019-11-04
当代陕西(2019年5期)2019-03-21
新商务周刊(2018年7期)2018-12-08
中国教育技术装备(2016年22期)2017-03-02
中国卫生(2015年9期)2015-11-10
吉林农业(2015年6期)2015-10-16