
船载光电经纬仪坞外星体标校
2010-05-11 01:39马庆坤乔彦峰
中国光学 2010年6期
马庆坤,乔彦峰
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033; 2.中国科学院研究生院,北京100039)
船载光电经纬仪坞外星体标校
马庆坤1,2,乔彦峰1
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033; 2.中国科学院研究生院,北京100039)
为了适应海上应用并降低经纬仪坞内标校成本,采用恒星位置代替固定方位标,将原本在坞内的标校工作转移到海上。首先,根据恒星星表精确、实时地计算出恒星位置。然后,通过坐标转换算法将其位置值转化到测量系下,运用船摇自稳定算法保证经纬仪的正常跟踪并记录数据。最后,根据事后解算算法分析记录数据,分离设备单项差并计算系统误差。实验结果表明,海上星校单项差的标定与坞内通过方位标标定结果非常接近,照准差、水平差、垂直差的偏差分别为0.015″、0.22″和0.014″,系统误差的标定与坞内结果具有很好的一致性,完全能够满足经纬仪海上标校的要求。
光电经纬仪;坞外恒星标校;解算
1 引言
传统的经纬仪标校需要建立多个方位标,用精确的大地测量方法确定方位标到待标校经纬仪的方位和俯仰角位置,然后与经纬仪实测数据比对,实现经纬仪自身的标定。该方法自动化程度不高,耗资较多。
恒星的位置可以实时地计算出来,且精度很高。利用这种恒星位置的确知性,以精确的恒星位置代替方位标来标定经纬仪的各单项差,方法简单且自动化程度高,目前这种方法已在国内外的许多靶场开始应用,效果很好。
以精确的恒星位置为基准,对运动平台上的经纬仪进行精度标校,目前有迫切的应用需求。例如航天测量船船载光电经纬仪在海上情况下,无法人工建立测量基准标。如果测量任务前在海上被迫进行了轴系或零位调整,也只有用星校的方法,才能在一定精度内对轴系和零位进行重新标定。在海上动态情况下,通常只好利用星体标校法在测量任务前后实现船载经纬仪轴系差、零位差的标定,监视经纬仪自身的轴系及零位误差,为事后分析测量精度提供必要依据。另外,航天测量船船载经纬仪的常规标校需要定期进入船坞,坐墩后在船坞周围建立方位标,再用大地测量的方法精确测定方位标作为测量基准,整个过程至少要半个月,费用巨大。星体标校方法可以在不进坞的条件下实现标校,甚至在测控任务的航渡期间就可完成,自动化程度高,耗费时间短,因而有望取代坞内标校。
本文介绍了远洋测量船船载标校经纬仪的海上标校实验,具体试验环境要求为:时间统一勤务系统提供时间统一服务,GPS定位系统提供平台实时位置,惯性导航系统提供平台实时姿态数据,运动平台变形测量系统提供平台实时变形数据,跟踪伺服系统完成船摇自稳定跟踪。整体过程大致如下:首先利用 FK5星表选择合适的恒星,经纬仪测量电视跟踪测量数颗恒星并记录数据,再利用FK5星表和测量时记录的各帧时间码、平台GPS位置数据、平台姿态数据计算恒星的理论位置数据,与实测数据作差,利用适当的差分模型求解,进而完成标校。标校结果表明,海上星校单项差的标定与坞内通过方位标标定的结果非常接近,且方法简单易行,有望取代坞内标校。
2 工作原理
2.1 获取恒星理论位置
星体标校的核心是应用星库对理论位置精确的计算,该系统微机内设置星库,星库中每个恒星的记录有星号、星等、平赤经、赤经百年自行、平赤纬、赤纬百年自行、恒星视向速度、恒星周年视差、光谱等参数,依据这些参数进行天文计算,可以得到任一时刻精确的星体位置。
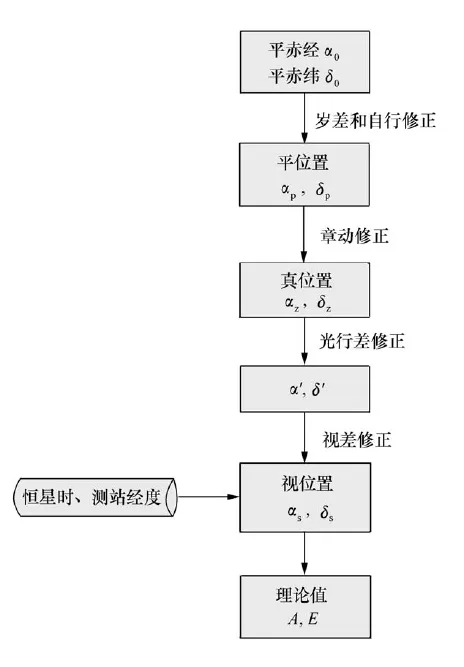
图1 计算恒星位置原理图Fig.1 Block diagram of star orientation
首先,对2000年首平赤经和平赤纬 α0,δ0进行岁差和自行修正,获得观测时刻的平位置 αp和δp,对αp和 δp进行章动修正,计算观测时刻恒星的真位置αz和δz,对真位置αz和δz进行光行差修正,得到α′和δ′,对α′和δ′进行视差修正,得到最终的恒星视位置 αs和 δs。然后,计算真恒星时,带入已知测量站的经度λ,得到恒星对应测量站的时角,从而得星体在大地坐标系中的方位角和高低角。其流程如图1所示。
由于大气折射,观测得到的星体位置与星体真实位置不同,观测得到的星体高度应减去蒙气差,才得到星体真实高度。星体的天顶距越大,蒙气差越大,温度气压有所改变,蒙气差的大小就有所不同,星体理论高低角在用作引导数据时应加蒙气差修正。


式中p为测站气压,单位为Pa;T为测站温度,单位为K。
2.2 稳定跟踪
在无稳定平台的舰船上,经纬仪采用速度前馈稳定的方法,用软件完成船摇隔离。具体实现方法是经纬仪主控计算机分系统接收惯性导航系统船姿数据,采用最小二乘法进行船体速度、位置预测,经过坐标转换及前馈处理,生成测量系的引导值,送给跟踪伺服系统,实现在无机械稳定平台下的星体跟踪测量。
3 关键算法
3.1 坐标系转换
通过上述过程得到地平系中恒星(Ad,Ed)理论值,在运动平台上引导还需经过如下坐标转换到测量系(Ac,Ec)。转换流程如图2所示。

图2 坐标转换结构示意图Fig.2 Framework of coordinate transition
地平极坐标系至直角坐标系。

地平直角坐标系至甲板直角坐标系。

其中航向H、纵摇P、横摇R由惯性导航系统实时提供。
甲板直角坐标系至极坐标系。

修正经纬仪单项差,甲板系转至测量系产生引导位置数据,发往跟踪伺服。

其中g为定向差,c为照准差,b为横轴差,h为零 位差,I为垂直轴误差,α为垂直轴倾斜角。
3.2 事后解算算法
光电经纬仪测量电视是高精度的光测系统,测量星体的精度高,可以认为测星的误差是由于经纬仪的零位差和轴系差引起,即:

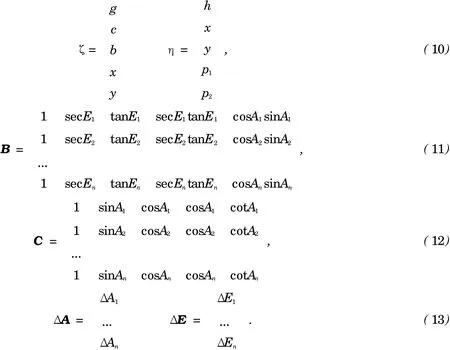
其中:p1为弯沉误差,p2为折射误差,Δ Ai和 Δ Ei为第i颗星方位角和高低角误差。
F1,F2实际上是比较复杂的函数,通过工程近似得到的线性模型,利用最小二乘法求出g,c,b, I,α,h,p1,p2的估计值。
设测星理论值为At和Et,可得出理论值与实测值之差为:

根据最小二乘法计算出单项差。

其中:
接下来计算系统误差。Δ Aij、Δ Eij为第i颗星第j画幅方位和高低角误差,N为用于解算的星数,M为单颗星记录的画幅数。
测量角总误差为:
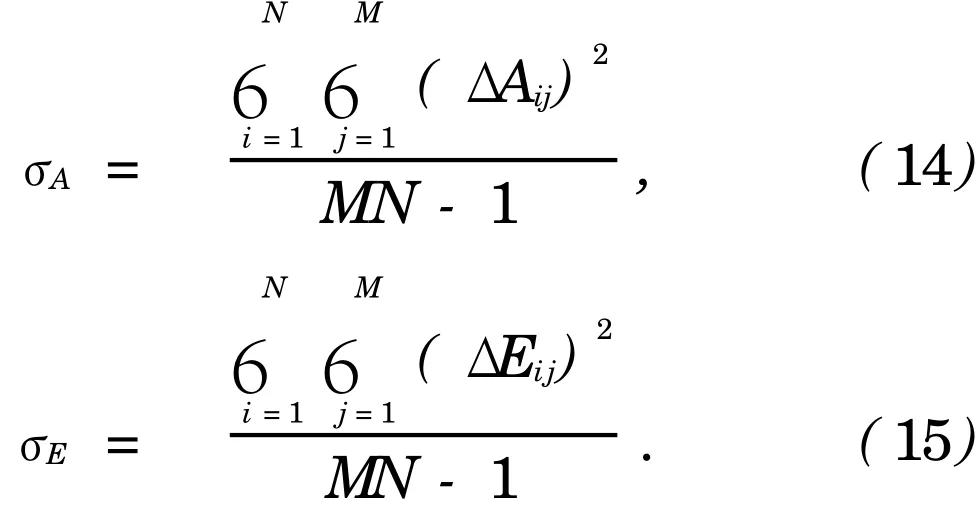
测量角单位误差为:
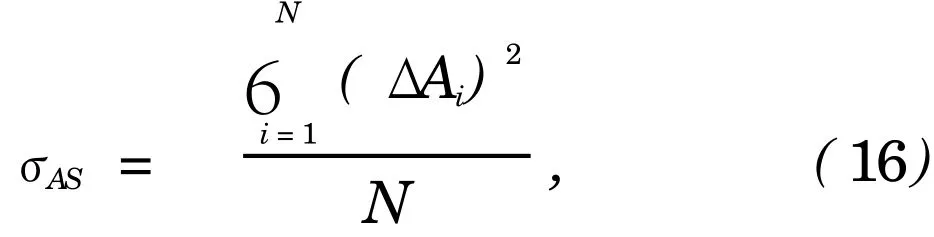
测量角随机误差为:
4 测量实验与结果
本方法在远洋测量船船载标校经纬仪的改造中进行了首次试验,船在坞内时轴系误差的标定采用拍固定方位标或对平行光管两种方法,其中对周围4个预设方位标引导记录,然后用主控软件的解算程序解算轴系三差,换操作手重复3次。因测量船在坞内坐墩,结果具有高度一致性,因此对平行光管只重复了2次。海上标校时分时段,分环境进行了5次。前3次夜间测星,测星数分别为12颗、24颗和8颗,天气、海况均佳,特别是第2次,因所测星数较多且均匀分布,结果与坞内标校结果非常接近,将第2次测星结果与第2次坞内拍标结果进行比较,照准差偏差为0.015″,水平差偏差为0.22″,垂直差偏差为0.014″。3种标校方法结果如表1所示。

表1 3种标校方法结果Tab.1 Results of three different calibrations
在船出坞后的某次设备例行维护中,主传感器在维护人员擦拭过程中偏离了原位置,照准差需重新标定,且只能通过拍星的方式进行。在海况、天气、时间段都合适的情况下,进行了多次星校,取一致性较好的数据,保证了标校经纬仪在后续多次任务中的精度。同时证明,通过海上拍星,可以产生有效可用的轴系三差数据。经过反复验证表明,通过海上测星解算出的系统误差与坞内坐墩时具有很好的一致性,偏差为±3″。
5 结论
本文对远洋测量船船载标校经纬仪进行了海上标校实验,结果表明,在海况、天气、时间段合适的情况下海上星校数据与坞内标校数据非常接近。照准差偏差为0.015″,水平差偏差为0.22″,垂直差偏差为0.014″。由此证明,船载经纬仪海上标校方法标校精度高,且简便易行,可以取代坞内标校,以此可以大大节约设备改造、坞内标校及海上校飞的经费。
[1]蔡建军,朱杰,周朝猛,等.船载遥测设备海上动态标校方法[J].中国科技信息,2006(6):139-140.
CAI JJ,ZHUJ,ZHOUCH M,et al.A theory of dynamic calibration of shipborne telemetering equipments[J].China Sci. Technol.Information,2006(6):139-140.(in Chinese)
[2]金光.光电经纬仪的自动化标校与白天测星技术研究[J].光学 精密工程,1991(2):87-90.
JIN G.A technical study of the automation demarcation and correction and the day light steller measurement for electrooptical tracking systems[J].Opt.Precision Eng.,1991(2):87-90.(in Chinese)
[3]孙晓昶,皇甫堪.以恒星位置为基准的运动平台上测控雷达精度标校技术[J].宇航学报,2002,23(3):29-33.
SUNX C,HUANG F K.Precision calibration of moving platformbased radar with stars as reference marks[J].J.Astro-nautics,2002,23(3):29-33.(in Chinese)
[4]李艳平,李岩,郭立红,等.对经纬仪静态精度检测中星校技术误差源的分析[J].光学 精密工程,2004,12(2):79-83.
LI Y P,LI Y,GUO L H,et al.Error analysis of star calibration technique in theodolite static presision detection[J].Opt. Precision Eng.,2004,12(2):79-83.(in Chinese)
[5]姚兆宁,孙晓昶.舰载精密测量雷达星体标校方法及应用[J].现代雷达,1999,21(4):7-12,31.
YAO ZH N,SUN X C.Shipborne accurate instrumentation radar star checkout method and application[J].Modern Radar,1999,21(4):7-12,31.(in Chinese)
[6]刘云飞.船载测控系统的标校[J].无线电通信技术,2003,29(2):1-3.
LIU Y F.Calibration of ship-based measurement and control system[J].Radio Communications Technol.,2003,29(2): 1-3.(in Chinese)
[7]袁诚宏,朱晓峰,陈健,等.基于联合放球的船载雷达角度零值标校方法[J].飞行器测控学报,2009,28(4):23-25.
YUAN C H,ZHU X F,CHEN J,et al.Balloon-tracking zero angle calibration method for ship-borne radars[J].J.Spacecraft TT&C Technol.,2009,28(4):23-25.(in Chinese)
[8]王琦,张继旭.基于CCD激光经纬仪的雷达标校及数据处理方法[J].战术导弹技术,2009(1):89-92.
WANG Q,ZHANG J X.A method of radar calibration and data processing based on CCD laser theodolite[J].Tactical Missile Technol.,2009(1):89-92.(in Chinese)
Offshore star calibration of electro-optical shipborne theodolite
MA Qing-kun1,2,QIAO Yan-feng1
(1.Changchun Institute of Optics,Fine Mechanics and Physics, Chinese Academy of Sciences,Changchun 130033,China; 2.Graduate University of Chinese Academy of Sciences,Beijing 100039,China)
In order to meet the requirements of offshore calibration for theodolites and to reduce calibration costs,this paper presents a calibration method of shipborne theodolites.Using this method,almost all the work canbe carried out at sea.At first,based on FK5 ephemeris,the apparent position of a starcan be calculated in real-time.After the coordinate transition,bootstrap values in the measurement system are ready.The algorithm of ship movementis used to keep the stablization of tracking at sea.Atthe same time,real-time data are acquired and recorded,and the axis errors and systemerrors of the theodolite can be calculated based on several algorithms.Experimental results indicate that the precisions of the calibration in dry-dock and the star calibration are very close.The tolerances of visual axis error,horizontal axis error and the vertical axis error are 0.015″,0.22″and 0.014″,respectively.The star calibration agrees with the former results very well in system errors after calculations.It can satisfy the requirements of offshore calibrating of a ship-based theodolite.
theodolite;offshore star calibration;calculation
粤港关键领域重点突破项目(No.2004A10403021);广东省攻关项目(No.2006A10401006);国防科技预研基金资助项目(No.104-0603)
V556.5;TP391.4
A
1674-2915(2010)06-0653-06
2010-06-21;
2010-10-13
马庆坤(1981—),男,河南沈丘人,硕士研究生,主要从事实时控制软件和虚拟仪器软件方面的研究。E-mail:markingkun@163.com
乔彦峰(1962—),男,吉林长春人,研究员,主要从事光电测量、光电瞄准、光电测控技术方面的研究。E-mail:qiaoyf@ciomp.ac.cn
猜你喜欢
宇航计测技术(2022年2期)2022-06-01
数学物理学报(2021年5期)2021-11-19
科学技术创新(2021年11期)2021-05-25
空间科学学报(2020年2期)2020-04-01
小学科学(2019年9期)2019-10-18
电子制作(2019年7期)2019-04-25
宇航计测技术(2018年3期)2018-09-08
百科探秘·航空航天(2016年9期)2016-12-01
小猕猴智力画刊(2016年9期)2016-05-14
火炮发射与控制学报(2015年2期)2015-11-27
