牵引电机负载模拟系统的转矩控制方法
2010-04-28 07:03:46李思杰陆峰杨中平
电气传动 2010年12期
李思杰,陆峰,杨中平
(北京交通大学 电气工程学院,北京 100044)
牵引电机负载模拟系统的转矩控制方法
李思杰,陆峰,杨中平
(北京交通大学 电气工程学院,北京 100044)
基于轨道车辆牵引传动机构的物理模型,对牵引电机的负载转矩进行数学建模;针对阻尼负载转矩和惯性负载转矩2个部分分别提出直流负载电机电磁转矩的控制方法;按照加速时间不变原则,提出牵引电机牵引性能曲线按照负载模拟平台的功率进行等效缩放的方法;结合CRH2A型动车组的实车参数对上述方法进行仿真验证;在3.5 kW负载模拟平台上完成阻尼负载转矩实验,仿真和实验结果均证明所提出的转矩控制方法合理有效,能够准确模拟实车牵引电机负载。
负载模拟;牵引电机;阻尼负载;惯性负载;转矩控制
牵引电机负载模拟是为分析和研究牵引电机运行特性和性能、电传动系统的控制方法而提出的在脱离真车试验的条件下获取实验室试验数据的一种技术手段。它克服了真车试验成本高、可行性低、外部条件改变困难以及试验周期长等诸多缺点。通过模拟负载的变化模拟列车运行的不同工况,可以得到相应工况以及扰动作用下传动系统中关键物理量的变化,从而为研究车辆运行特性和传动系统的控制方法提供依据。
牵引电机负载模拟技术在电机与变流器参数和容量选择、牵引电机控制方法、空转滑行再粘着控制、牵引网压波动和直流侧谐波影响等诸多与传动系统相关的研究中都具有重要作用。
1 牵引电机负载转矩的性质
按照负载模拟系统建模的理论[1],牵引电机的负载转矩可以分为阻尼负载转矩和惯性负载转矩两部分。作者经过验证,对该文的部分结论进行了修正与完善,部分推导过程如下(受力分析参见图1,参数定义见表1)。
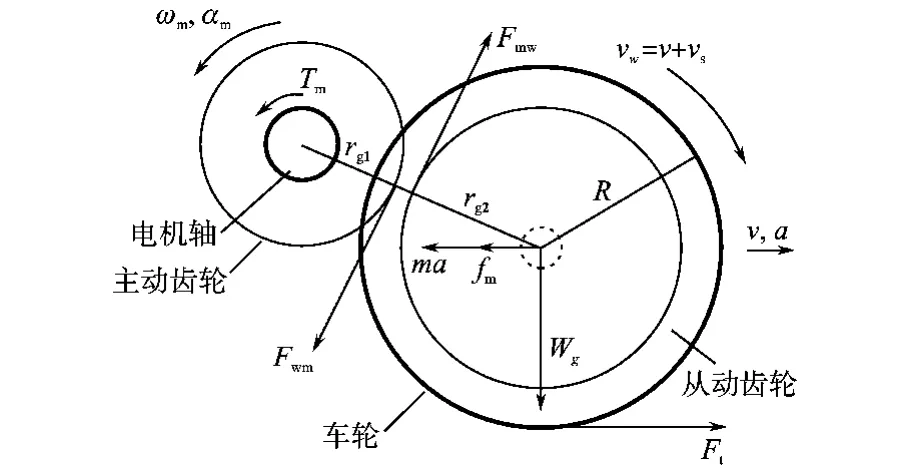
图1 轮对传动机构受力分析Fig.1 Force analy sis of motor-wheelset system
考虑列车运行整体受力情况,有

对单动轴列写平动方程,得到

对轮对的定轴转动列写转动方程:

考虑轮轨间蠕滑现象的存在,应当有

对于牵引电机,有下式成立:

考虑到齿轮传动效率的影响,有:

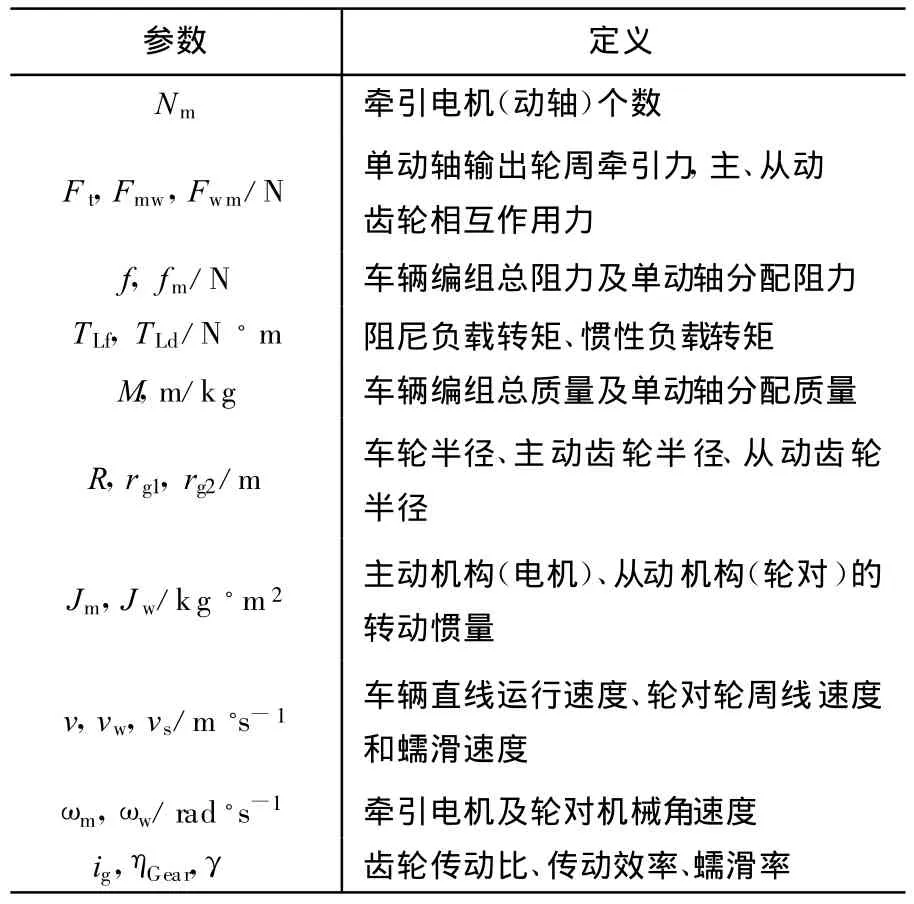
表1 系统建模参数定义T ab.1 The symbols used in the theory analy sis
联立式(1)~式(6),并由传动齿轮的传动关系
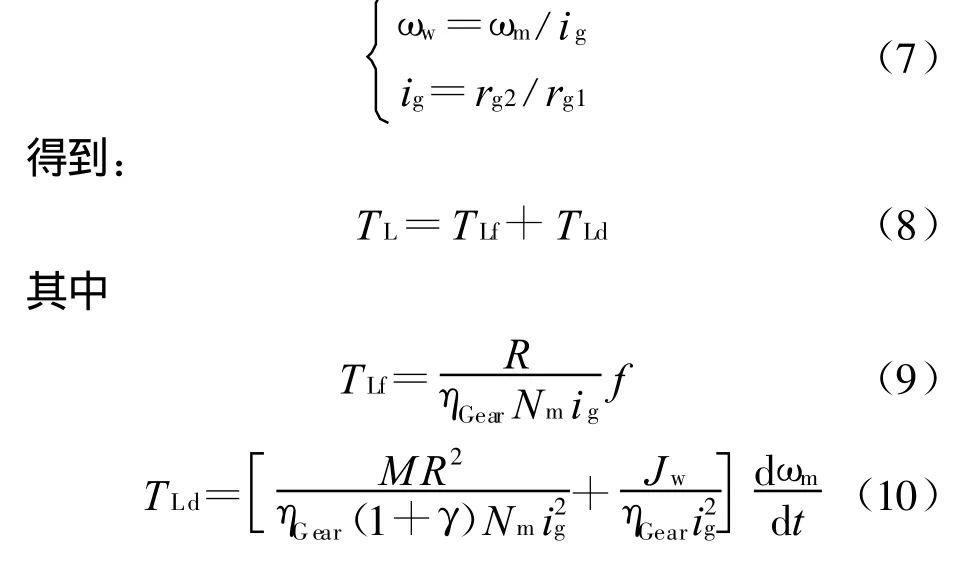
它们分别代表牵引电机负载转矩的阻尼部分和惯性部分,而式(8)就是牵引电机负载转矩的表达式。若另定义表示除电机之外系统的等效转动惯量,则

2 牵引电机的转矩控制
在负载模拟系统中,与实际车辆启动时的情况相同,牵引电机的输出转矩将作为系统首先施加的力矩作用于负载电机;负载电机通过感知牵引电机转矩和转速的变化,动态地输出相应的负载转矩,以达到模拟实车牵引电机负载转矩的目的。因此,在确定负载电机转矩控制策略之前,应当首先确定牵引电机转矩的控制方法。
实际车辆牵引电机的牵引性能曲线如图2所示[2]。此处以CRH2A型动车组为例,讨论如何实现牵引性能曲线按负载模拟实验平台的功率进行等效缩放。
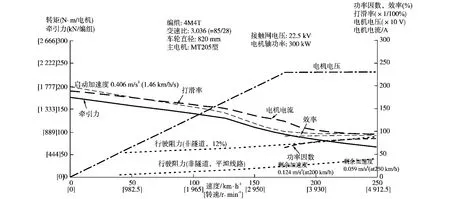
图2 CRH2A型动车组牵引性能曲线Fig.2 The traction performance curves of CRH2A

按照实际情况与实验室情况分别对电机列写转矩方程式中:Jms为实验平台电机固有转动惯量;Jad为通过惯性装置(如飞轮)[3-6]或负载电机加在实验系统上的附加转动惯量。
牵引转矩具有如下形式:
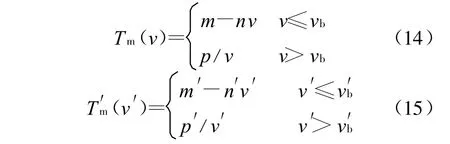
令 v=kvv′,Tm(v)=kTT′m(v′),称 kv 为转速缩放系数,kT为转矩缩放系数。代入式(14),得
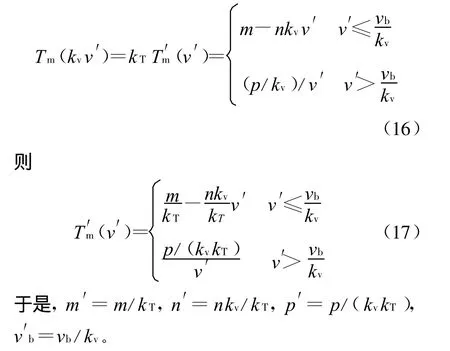
同理,对于阻尼负载转矩具有如下形式

按照相同的转换系数处理,可以得到a′=a/kT,b′=(kv/kT)b,c′=(/kT)c。结合式(12)~ 式(13),
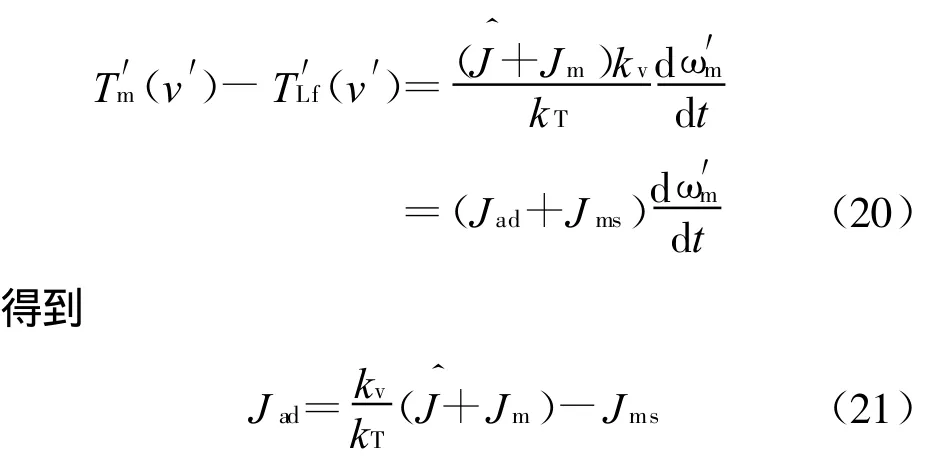
式中:Jad为应当加在实验系统上的附加转动惯量。
图3为取kv=3.46,kT=100时缩放前后的牵引转矩曲线和阻尼转矩曲线。此时,缩放前后的系统加速度有如下关系:
实际应用中,转速与转矩的缩放系数根据电机额定输出转矩、额定转速来确定。缩放后的牵引转矩曲线将作为牵引电机的给定转矩曲线,而阻尼转矩曲线将作为负载电机阻尼转矩的给定。
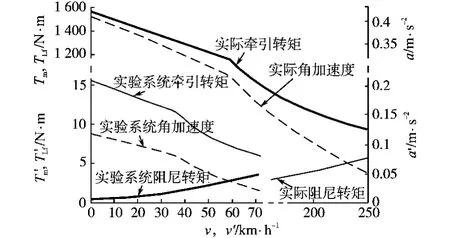
图3 牵引性能曲线缩放示意图Fig.3 Traction curves before and after being reduced
3 负载电机的转矩控制
本文仅讨论在直流电机作为负载电机的条件下,如何通过控制直流电机的电磁转矩为牵引电机加载。直流电机的转矩控制较之异步电机更为简单,因而其控制思路可以作为研究交流负载电机转矩控制方法的依据。
由式(8)知,负载电机输出的电磁转矩与牵引转矩相反,且应当由阻尼负载转矩和惯性负载转矩两部分组成。按照阻尼曲线控制直流电机的电磁转矩较为简单,本文重点讨论如何用直流电机实现惯性负载转矩的准确模拟。
实际上,惯性负载转矩不需要使用电机来实现。使用飞轮等具有大惯量的机械装置同样可以提供这样的转矩,而且能够极大地降低系统的控制难度。但是,由式(21)得到的附加转动惯量往往较大,如果这些惯量全部用飞轮装置来模拟,势必造成实验装置无论体积还是重量都大大增加;同时,飞轮惯量难以改变的特性也会限制实验平台功能的发挥,降低负载模拟的灵活性。因此,讨论惯性负载的电动模拟技术是十分必要的。
图4为直流电机电流闭环控制系统在复频域内的控制框图,其中点划线框内的部分就是直流电机的复频域模型。Tm(n)是牵引电机的输出转矩,同时也是直流电机的负载转矩。根据叠加原理,将惯性负载转矩通道单独进行分析,取

式中:Kn为电机转速到机械角速度的转换系数,Kn=2π/60 。
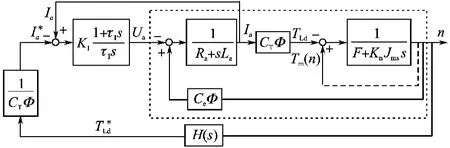
图4 直流电机电流闭环控制系统框图Fig.4 Closed loop control system of DC generator
下面讨论如何根据系统输出响应特性确定τH的取值。
如果忽略直流电机的粘滞阻尼系数F,取电枢电气时间常数 τe=La/Ra,令PI调节器中的τ1=τe,当K1取值足够大时,利用梅森增益公式推导得到系统传递函数:

将式(24)传递函数写成图5的形式。其中,n*为期待输出的转速响应,n为实际输出的转速响应。可以看出,当τH=0时,这两个响应是完全一致的。根据上式进行系统调试,找到微分控制响应时间较短同时系统振荡和高频噪声信号较小时对应的最佳惯性时间常数。τH的取值主要与负载电机所模拟的惯性质量大小有关,同时还要受到电流PI调节器参数,控制算法响应时间等因素的影响。

图5 惯性负载转矩控制系统传递函数Fig.5 T ransfer function of the inertia controller
4 负载模拟系统仿真与实验
CRH2A型动车组用牵引电机、实验室交流牵引电机、直流负载电机参数见表2。

表2 电机参数Tab.2 Parameters of the motors
4.1 负载模拟系统仿真
基于转矩控制理论,在Matlab/Simulink平台上搭建CRH2A型动车组牵引电机负载模拟系统小功率实验平台的仿真模型。仿真系统控制框图见图6。

图6 负载模拟系统转矩控制模型Fig.6 Torque control model of the load imitation system
按照平直道上的基本阻力经验公式fb=8.63+0.072 95v+0.00112v2(N/t)计算编组总阻力,并将CRH2A型动车组车辆参数代入式(8)~式(10)中;根据表2中实验室牵引电机的额定转矩和转速计算牵引曲线缩放系数。由于牵引电机转速与列车运行速度有如下关系:

如果以列车运行速度250 km/h(此时实际电机转速约为4 912.5 r/min)对应实验平台牵引电机的额定转速1 420 r/min,则电机转速缩放系数约为3.46。由于电机转速与列车运行速度的正比关系,取kv=3.46,kT=100,缩放后的曲线见图3;由式(21)取系统附加转动惯量Jad=17.37 kg◦m2,PI调节器参数 k1=100,τ1=τe=0.06 s,惯性滤波时间常数τH=0.1。模拟牵引电机按图2所示牵引曲线全速启动的过程,仿真时间500 s,仿真结果见图7。
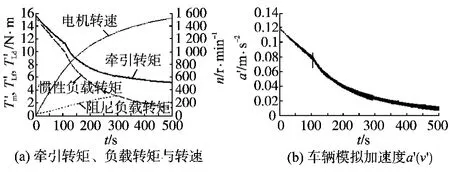
图7 负载模拟系统控制仿真结果Fig.7 Simulation results of the imitation sy stem
由图7a可以看出,电机全速启动时加速至额定转速 1 420 r/min(对应 v=250 km/h,v′=72.25 km/h)所用时间约为375 s,与实际启动时间基本相同[1]。图7b显示的车辆模拟加速度约为车辆实际加速度指标的1/3.46,满足式(22)得到的结论,同时与图3一致。可见,前文提出的牵引转矩与负载转矩控制方法是合理、有效、准确的。
4.2 负载模拟系统实验
在负载模拟系统的硬件实验中,三相异步牵引电机的控制方法与图6一致。直流负载电机励磁方式为他励,采用恒磁通变电枢电流的控制方法。由于磁通恒定,其感应电动势常数和电磁转矩常数都维持不变,这样就可以通过电枢电流的变化直接计算负载转矩的变化,使控制更为简单。实验系统的电路结构见图8。
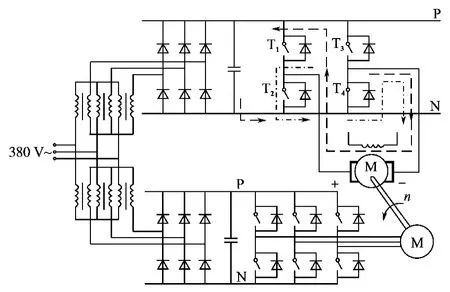
图8 负载模拟实验系统电路结构图Fig.8 Circuit structure of the hardware platform of imitation system
考虑到电机持续运行在额定转速以上可能对电机的机械结构造成损伤,可以采用降低牵引转矩级别或者模拟坡道运行阻力的方法使电机的平衡转速维持在额定转速以内。本文取第8级牵引曲线进行牵引控制,使不考虑电机轴联系统固有机械阻尼时牵引力矩与阻力矩平衡在牵引电机的额定转速。在负载模拟实验平台上进行阻尼负载转矩实验,交流牵引电机侧与直流负载电机侧的转速和电流波形分别如图9和图10所示。
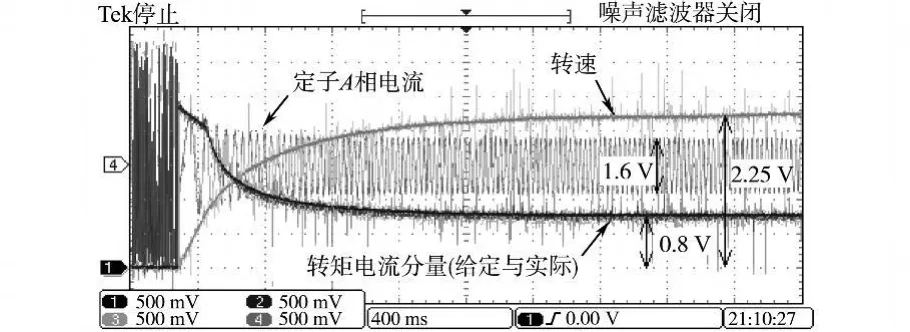
图9 交流牵引电机转速、转矩电流Fig.9 Speed and torquc current of the AC traction motor
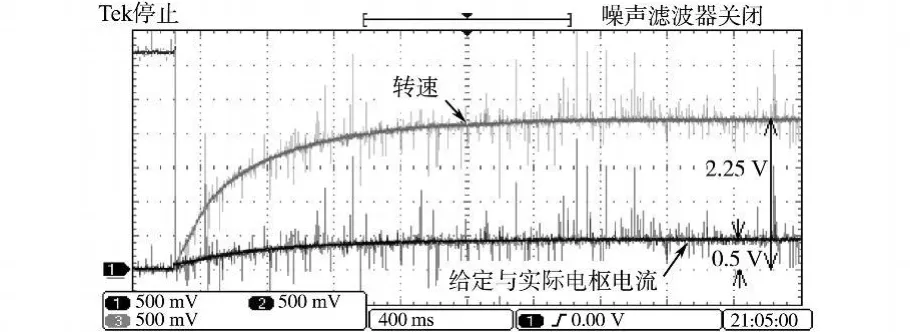
图10 直流负载电机转速、电枢电流Fig.10 Speed and armature current of the DC load motor
图9为交流电机转速(1 500 r/min对应3.3 V)、定子A相电流(1 A对应100 mV)、给定转矩电流分量与实际转矩电流分量(10 A对应3.3V)的实验波形。由图9可知,定子 A相电流从启动时的5.6 A左右(电流传感器电流/电压比为1 A/100 mV)逐渐降低至平衡后的2.8 A以下,其转矩电流分量IT与给定转矩电流I*T基本重合,故电机实际输出转矩与缩放后的第8级牵引转矩曲线一致。电机转速最终平衡在1023 r/min(1 500 r/min对应3.3V),此时对应输出的牵引电磁转矩约为4.9 N◦m。
图10为直流负载电机转速(1 500 r/min对应3.3 V)、给定电枢电流与实际电枢电流(10 A对应3.3 V)的实验波形。电枢实际电流可以完全跟随给定电流,转速稳定后其值约为1.52 A。参照表2中直流电机的转矩常数,此时对应输出的负载电磁转矩约为2.4 N◦m。可见,牵引与负载电磁转矩之间仍有约2.5 N◦m的转矩差。这一方面是由于第3节中讨论负载电机控制方法时没有考虑电机粘滞阻尼转矩,而这部分转矩需要在阻尼负载转矩控制时予以适当补偿;另一方面电机参数变化会引起矢量控制中磁场定向产生偏差导致转矩输出不完全准确,这可以通过动态监测转子时间常数的变化,改进矢量控制算法来解决。上述实验结果表明,对牵引电机阻尼负载转矩的控制效果符合预期,控制结果能够模拟实际牵引电机在相应条件下的运行状况。
5 结论
牵引电机负载模拟系统是双电机双转矩控制系统。系统并没有一个转速闭环调节器,转速信号只是作为系统输入的一个参变量参与系统控制;同时转速又是负载模拟系统的控制目标之一,通过同时控制牵引转矩和负载转矩,实验系统的转速和加速度与实际车辆的运行状况动态保持一致。
虽然在仿真系统中很好地模拟了惯性负载转矩的控制,但是由于受到DSP程序执行时间、离散采样时间、开关管开关频率以及转速采样精度等条件的限制,实验系统不能完全满足惯性负载转矩控制理论所设计的要求,因而对这部分负载转矩的控制方法仍需要进一步完善。另外,本文已经给出了实验系统的附加转动惯量,此惯量值可以作为选取惯性机械装置(如飞轮)参数的依据。作者将另文讨论对牵引电机惯性负载转矩的DSP控制方法。
[1] 黄云鹏.轨道车辆牵引电机负载模拟控制的研究[D].北京:北京交通大学,2009.
[2] 张曙光.CRH2A型动车组(中国高速铁路技术丛书/和谐号CRH动车组技术系列)[M].北京:中国铁道出版社,2008.
[3] 李宗帅,董春.国外基于电动技术的机械负载模拟的现状[J].机械,2007,34(5):1-3.
[4] 王明彦.电动负载模拟技术的研究[D].哈尔滨:哈尔滨工业大学,2004.
[5] Padilla A J,Asher M G,Sumner M.Control of an AC Dynamometer for Dynamic Emulation of Mechanical Loads with Stiff and Flexible Shafts[J].IEEE T ransactions on Industrial Electronics,2006,53(4):1250-1260.
[6] Rodic M,Jezernik K,T rlep M.Control Design in Mechatronic Systems Using Dy namic Emulation of M echanical Loads[C]∥IEEE ISIE 2005,Croatia:Dubrovnik,2005:1635-1640.
[7] 杨中平.新干线纵横谈:日本高速铁路技术[M].北京:中国铁道出版社,2006.
[8] 邵兴.理论力学[M].北京:清华大学出版社,2009.
[9] 胡寿松.自动控制原理[M].北京:科学出版社,2001.
修改稿日期:2010-06-21
Torque Control in Traction Motor Load Simulation System
LI Si-jie,LU Feng,YANG Zhong-ping
Based on the physical model of motor-wheelset traction system,the expression of the load torque of traction motor was given.According to the two parts-the torque of damping load and inertia loads-the control method of DC load motor electromagnetic torque was proposed separately.Following the principle that the acceleration time should be the same as the actual time,how to reduce the traction performance curve to fit the power of the load simulation system in the laboratory was given.Consulting with the actual parameters of CRH2AEM Us,it authenticates and simulates the system control following the method above;having controlled the damping load torque on 3.5 kW hardware platform,the experimental results prove that the proposed torque control method is reasonable and effective,and is able to accurately simulate the actual motor load.
load simulation;traction motor;damping load;inertial load;torque control
TM 922.71
A
铁道部科研基金(2009J006-M)
李思杰(1988-),男,在读硕士,Email:lisijian29407@163.com
2010-04-02
(School of Electrical Engineering,Beijing J iaotong University,Beijing 100044,China)
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
大电机技术(2022年5期)2022-11-17 08:12:56
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
电子制作(2018年1期)2018-04-04 01:48:22
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
电子制作(2017年1期)2017-05-17 03:54:12
电子制作(2017年23期)2017-02-02 07:16:50
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
焊接(2015年1期)2015-07-18 11:07:32
淮南师范学院学报(2015年3期)2015-03-22 01:16:17