基于DM64X的红外图像采集系统设计*
2010-04-26 05:07李伟陈冬马锐
舰船电子工程 2010年5期
李 伟 陈 冬 马 锐
(海军91917部队1) 北京 102400)(海军指挥学院信息战研究指挥控制系2) 南京 211800)
1 引言
红外图像采集系统目前广泛应用在制导、目标识别、环境监控等领域,它是红外技术研究的热点之一。目前常用的图像处理核心器件包括ARM、FPGA、DSP三类微处理器。ARM 长于流程控制,因而针对图像处理设计的ARM内核多应用于多媒体,娱乐等系统设计中;采用FPGA实现图像处理算法具有运算速度快的特点,但该类大规模FPGA器件相对价格较高且设计过程复杂开发周期较长;针对图像处理而设计的DSP处理器不仅有运算速度快,配套接口全的特点而且价格相对较低,其单周期完成“乘加”运算,非常适合应用在图像处理领域。因而本设计采用DSP作为核心器件。
TMS320DM64X系列处理器是 TI公司针对图像处理领域设计的DSP器件,其最高主频可达1.2GHz。它不仅能够高速完成各种图像运算,而且其配套开发软件具有各种成熟的算法函数库,可大大简化设计方法缩短开发时间。DM643处理器尽管没有DM647/8等新型DSP处理器的运算速度快,运算效率也没有后者高,但它600M的主频及4800MIPS的性能足以满足图像采集、压缩,传输等功能,且具有更高的性价比。因而本设计选择DM643图像采集的核心器件。
2 系统设计
系统由红外CCD、视频解码器、DSP及附属电路、视频编码器及监视器构成。并且系统提供远程数据传输接口,可完成计算机远程控制和采集任务。系统结构如图1所示。
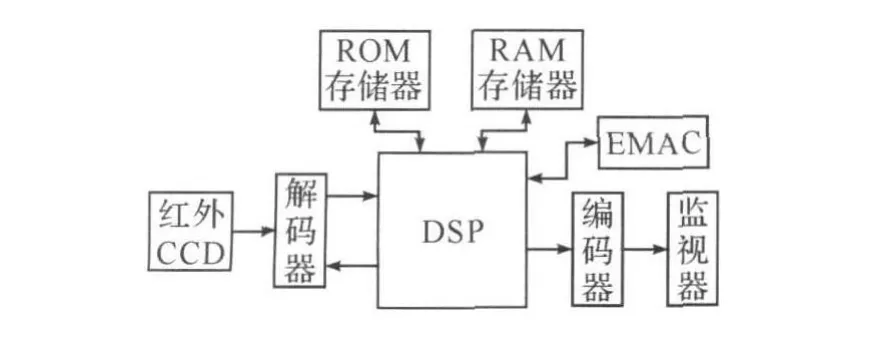
图1 系统结构示意图
3 红外CCD
CCD是整个设计的前端部分,对系统的性能具有非常重要的影响。CCD的选择主要考虑以下几个因素[1]:响应波长、探测距离、视频格式等。综合多种因素,选用红外CCD指标如下:
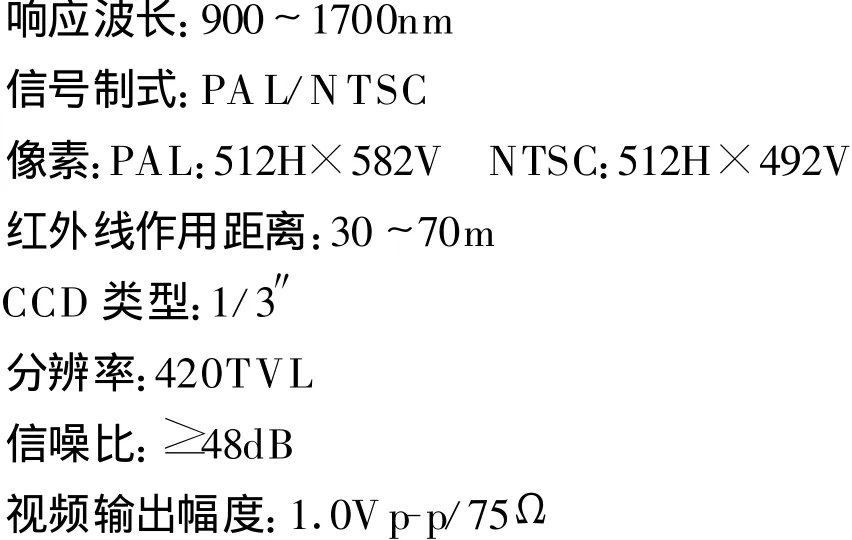
3.1 编/解码器
CCD的输出信号为PAL或NTSC制式的模拟信号[2],而处理后的数据用作显示器显示时也必须转换为PAL或NTSC制式的信号,因而必须在视频信号处理的前端和后端加上解码器和编码器。解码器采用MAXIM公司的芯片MAX9526,编码器选择PHILIP公司的SAA7105H芯片。解码器与DSP的VP1接口连接,编码器与VP2接口连接,编码器与解码器的控制端口采用IIC接口与DSP进行通信。
3.2 DSP及附属电路
3.2.1 电源系统
DSP接口和内核采用两种不同的电压,同样解码器也采用双电源供电,电路中主要有 1.8V,3.3V和1.4V三种电压。因而采用TI公司提供的配套线性电源TPS54310和TPS76801,它们可以满足电路中各芯片的供电需求。电源模块的设计对于系统的性能十分重要,电源纹波噪声会极大影响电路模拟部分的性能,因而必须设计滤波器来解决EMI问题[3]。
3.2.2 存储系统
存储器包括ROM和RAM两部分。RAM的读写速度较快,但其属于易失存储介质断电后无法保存数据,因而用作计算时把它用做内存,而程序被烧录在由FLASH芯片构成的ROM中。DM643处理器的EMIF接口可以方便的和各种类型存储芯片无缝连接。程序RAM可以有SRAM,SDRAM等多种选择,相对而言SDRAM的存储速度最快。因而本设计选用两块大小为4M×32Bit的HY57V643220C存储器构成4M×64Bit的存储空间。而ROM芯片选用大小4M×8Bit型号为AM29LV033C的FLASH芯片。
3.2.3 接口选择
实时图像数据量大,UART等慢速接口通常无法满足需求。USB接口具有传输速度快的优点,完全可以满足图像数据传输的要求。但其传输距离较短,无信号增强处理时其传输距离最多仅仅可以达到数米,因而USB接口也难以满足要求。EMAC接口的传输速度不及USB接口,但它完全可以满足设计的需求,而且它的传输距离可达100米甚至更长。因而设计中选择EMAC接口进行数据传输。
4 程序设计
因DM643片内没有ROM,程序需存储在片外的EMIF接口上的FLASH芯片中。C6000系列DSP具有三种上电引导方式[4],本系统很方便采用8位FLASH引导方式。因程序空间限制,全部程序无法一次搬运至片内存储器中,因而设计引导程序进行二次引导。即系统上电复位后首先将搬运程序引导至片内,然后跳转至搬运程序再由它将全部程序搬运至片内存储器。
系统采用TI公司具有实时特性DSP/BIOS作为操作系统。因而程序设计就变成了对各任务程序的设计。系统主要任务包括图像采集、图像处理及图像数据输出三个部分,因而系统设计三个并行的任务。三个任务模块在操作系统的调配下依次获得内核资源,各任务模块间通过信号量进行通信。程序结构如图2所示。
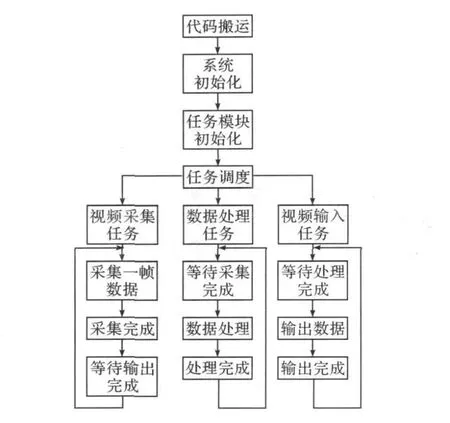
图2 系统工作流程图
5 结语
工程实践表明该系统可以实时完成图像采集处理工作,并且在应用图像消噪、边缘检测、图像增强等算法[5]时可以达到设计要求的实时性。采用两套该采集系统,分别选用红外波段和可见光波段的CCD,可以构成双波段图像融合系统[6]。如需要单块电路实现多通道图像采集任务,则可选用视频接口(VP)更多的DM642器件而无需对硬件和软件设计进行大范围调整。
[1]Jan Fischer,Tomas Radil.DSP Based Measuring Linescan CCD Camera[C]//IEEE International Workshop on Intelligent Data Acquisition and Advanced Computing Systems:Technology and Applications.Lviv,U-kraine,2003:345~348
[2]邵丹,韩家伟.YUV与RGB之间的转换[J].长春大学学报,2004,14(4):51~53
[3]关永,张杰,刘维民,等.低噪声视频图象采集系统电源设计[J].电子器件,2005,28(2):355~357
[4]栾璟明,雷志勇.基于DSP的图像采集与处理系统的设计[J].电子元器件应用,2008,10(1):8~11
[5]陈冰,王兴国,刘济林.基于DSP TMS320C6x的实时图像处理系统[J].光电工程,2000,27(6):37~42
[6]王毅,倪国强,李勇量.基于 TMS320C6x的双波段图像高速融合系统[J].中国图形图像学报,2002,2(10):1038~1042
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
小学生必读(低年级版)(2021年10期)2022-01-18
科学技术创新(2021年5期)2021-03-17
小学生必读(低年级版)(2021年11期)2021-03-09
小学生必读(低年级版)(2021年12期)2021-03-04
——编码器
演艺科技(2020年7期)2020-08-13
家庭影院技术(2019年8期)2019-12-04
电子制作(2019年15期)2019-08-27