
网络化防空统一制导指令场技术研究*
2010-04-24 05:23王航宇石章松
指挥控制与仿真 2010年5期
李 锐,王航宇,石章松
(海军工程大学,湖北 武汉 430033)
目前,国土要地防空问题变得很突出。面对空袭目标的多样化、高速化、隐身化和空袭方式的超视距化、饱和化、电子干扰化,要地防空越来越困难[1]。为了有效地做好要地防空,须充分地发挥要地所具有的所有条件,将所有可以利用的作战资源有效地集中使用,做到网络化防空作战[2],这样才能提高要地防空的效能,确保要地的安全。
沿海地区某国防要地具有以下特点:
1)要地周围岛屿众多,个别岛上布防了对海、对空的预警探测雷达以及防空岸导高炮团等部队;
2)要地的防御纵深较浅,需要岸基、海上机动平台以及岛屿防空部队的协同配合,扩大防御纵深。
针对上述要地防御特点,扩大要地防御纵深,提高其信息共享质量和防空反导效果,需要采取网络化防空作战体系模式。该模式具有以下特征:
1)预警探测组网:岸基防空导弹阵地、岛屿和海上机动作战平台均可部署探测传感器,形成多传感器对空中来袭目标的组网探测跟踪;
2)指挥控制组网:岸基防空导弹阵地、岛屿和海上机动作战平台均部署防空导弹,这样导弹可在不同节点、不同地理位置上发射;
3)制导指令组网:建立统一制导指令场,形成制导指令形成、分发、制导的一致平台,为不同地域发射的相同型号或不同型号的防空导弹提供制导指令,完成指令的转换、接力、分发任务,实现要地防空作战中防空导弹的接力制导作战的目的。
因此,研究统一制导指令组网过程中的相关资源优化配置、任务分配问题,实现海军要地防御中多种防空导弹的协同制导任务,对扩大要地防御纵深,提高其信息共享质量和防空反导效果具有重要意义。
1 统一制导指令场结构及功能
统一制导指令场是实现网络化协同防空作战的技术基础,是在雷达组网探测技术的基础上,进一步发展了组网制导和控制技术,把多个/种探测器、多个拦截器、多个指令站通过分布式网络连接起来,由可变中心节点指挥控制,实现对制导体制不同的防空导弹制导指令的转换分发。防空导弹不隶属于某个指令站,而是根据战场态势需求由网格化分布的指令站接力制导。统一制导指令场是对单/多空袭目标实施拦截的战术级、一体化、灵活高效的作战方式,是信息网络技术、协同作战技术应用的有机结合,也是火控信息和拦截武器资源能力的综合集成。
防空导弹在统一制导指令场模式下的协同作战,系统主要包括:海基/空基探测跟踪系统,导弹及其发射系统,指令系统和指挥控制系统。探测跟踪节点、指令站节点、导弹发射节点和指挥控制节点互相分离,但它们之间通过有线或无线指挥控制通信网连成一个整体。导弹具有自定位能力,指令站以一定网格形式分布在防区内组成统一制导指令场。指令场覆盖整个防区,与空中飞行的导弹进行信息交换,指令站在截获导弹后,将目标的位置、速度等信息以一定周期广播式发送,导弹接收来自指令站的信息并将自身的位置、速度和弹上状态信息下传。防空导弹进入统一制导指令场后,由网格化分布的指令站接力制导[3]。指令站能根据战场需求对不同制导体制的导弹实现制导指令的转换分发。
统一制导指令场的结构如1所示。
1)多传感器系统、多指令站系统、防空武器系统各个系统内部在地理上和空间上是分散的,各个系统和指控中心之间也是分散的,它们之间通过有线或无线通信网络连接起来,根据防空作战需求形成不同的虚拟平台[4]。它是一种“逻辑平台”,与当前传感器、制导站、防空武器及指控系统集成在单个物理平台上有极大的区别。
2)虚拟平台内,各系统之间的功能:指控中心负责各系统的指挥调度,主要功能有:①为各传感器系统分配各自需要跟踪的目标,实现网内传感器的宏观管理。②为各防空武器系统分配各自需要拦击的目标,解决网内武器—目标分配问题。③在完成了各个传感器系统和武器系统的任务分配之后,指控中心为各指令站分配各自所需制导的防空武器。
传感器系统根据所分配的任务对目标进行跟踪,并将相应的跟踪信息传输给相应的防空武器,为防空武器的发射提供目标信息支持。这种服务是短暂性的,防空武器完成发射任务后传感器不再为该防空武器提供正在跟踪目标信息。同时,传感器源源不断的把跟踪到的目标信息传输给为拦击该目标的防空武器提供制导服务的指令站。
防空导弹武器系统根据指控中心分配的任务对目标进行拦击。武器系统具有自定位功能(类似通过弹上GPS设备实现自定位),它将自身的位置信息和运动参数下传给指令站。
指令站按照指控中心分配的制导任务,通过接收传感器提供的目标实时跟踪信息和拦击该目标的防空导弹下传的自身实时运动参数,生成指导指令,并上传给对应的防空导弹。
3)虚拟平台的构成是不确定的,即没有固定的传感器系统、武器系统、指令站系统和指控中心联盟。它是根据具体防空作战任务需求和各系统的功能实时动态组建,以达到资源的优化配置和提高防空作战效能;各虚拟平台之间没有严格的界限,它们通过有线或无线通信网络进行链接,从而构成一种分布式系统。
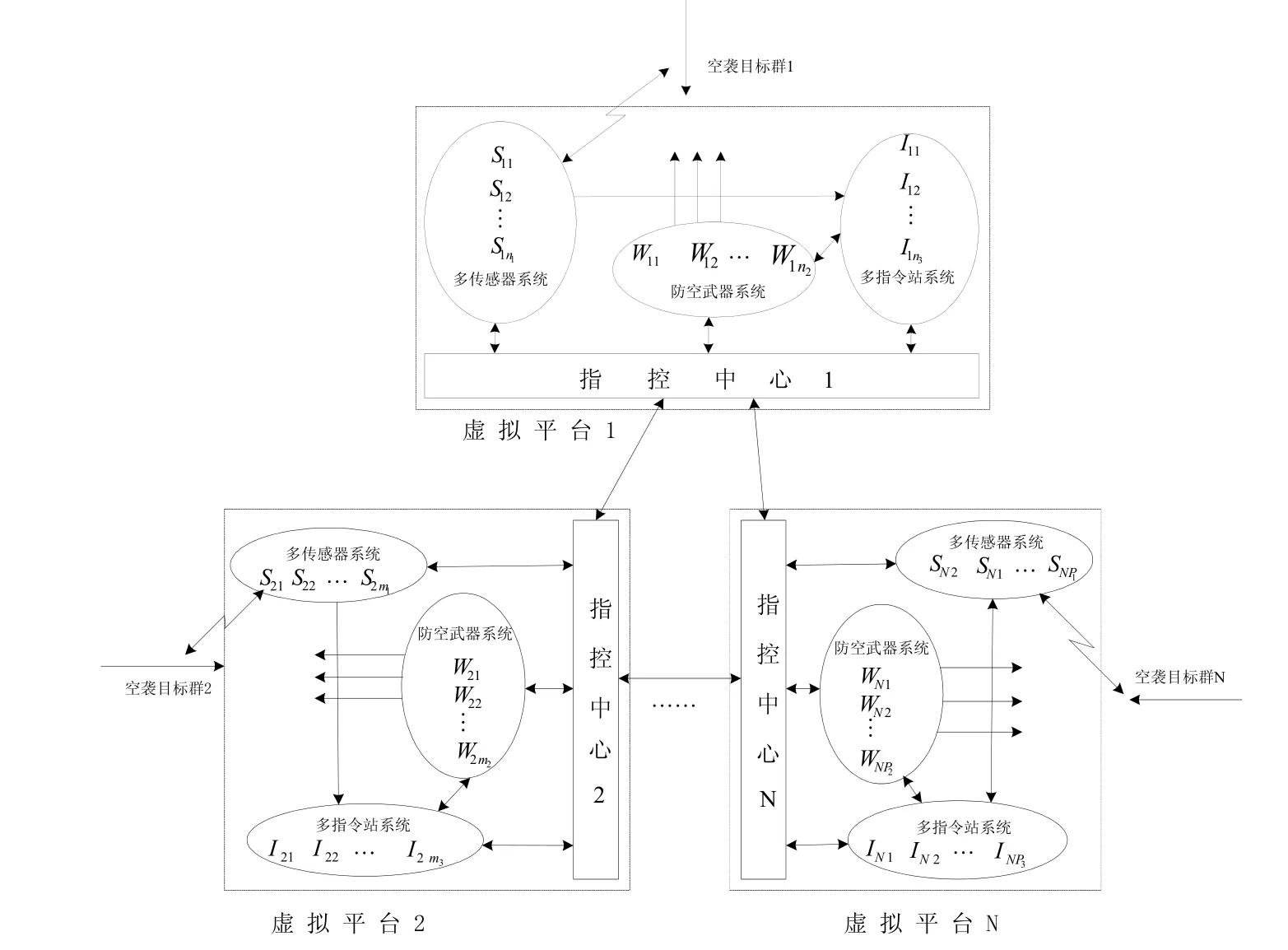
图1 网络化防空作战统一制导指令场结构框图
2 统一制导指令场作战流程
统一制导指令场作战流程主要包括目标的远程探测、虚拟平台的形成、平台内多种任务分配以及指令站对防空导弹的制导等,见图2具体步骤如下:
第一步:共用传感器资源对多批次、多方向来袭目标进行远程探测和预警。这里的共用传感器资源——主要是天基(卫星资源)、地基和海基(远程预警雷达)远程预警系统。它们一般属于战略性探测预警资源,全军共用,由战略C3I系统指挥控制和管理,与区域防空指挥控制中心直接连接或通过战略C3I系统间接连接。对于战术弹道导弹防御作战,应通过数据链等将远程预警信息直接送至战术级(区域防空指控中心)、火力单元级指控系统,以增加预警时间[5]。
第二步:虚拟平台的形成,即选择恰当的地理上和空间上分散的传感器、防空武器、指令站和指控中心来完成全部防空作战任务或部分防空作战任务。虚拟平台的组建是动态的,由具体防空作战任务决定。网络化防空作战统一制导指令场允许存在多个虚拟平台,每个虚拟平台的防空作战任务是互不相同的,它们共同完成整个防空作战任务。
第三步:指控中心完成多传感器-多目标分配,即选择最佳位置和恰当性能参数的传感器对目标进行跟踪。它可以是单传感器-多目标分配问题,也可以是多传感器-多目标分配问题。后者包括两种情况:一种是每个传感器跟踪各自的目标,互不相同;另一种是各传感器可以跟踪相同的目标。

图2 网络化防空作战统一制导指令场作战流程图
第五步:导弹发射后,指控中心根据各导弹的理想弹道,以及各指令站的位置、指令站的制导能力等进行指令站-导弹匹配,即为各指令站分配需要制导的导弹,同时将该导弹的伪随机码(伪随机码不仅明确了指令站制导的导弹,还隐含了该导弹的制导体制)等相关信息发送给对应的指令站。根据指令站-导弹、导弹-目标以及传感器-目标三种关系,可得到指令站-传感器匹配关系,指控中心据此通知对应传感器将目标的跟踪信息传给对应指令站。
第六步:导弹在拦击目标的飞行过程,周期性地将自身的位置信息和运动参数以广播的形式下传。指令站接收到导弹的信息后,根据伪随机码判断是否是指控中心分配制导的导弹。如果是,指令站记录下该导弹的信息,并根据传感器对目标的跟踪信息生成制导指令(制导指令加有伪随机码,并经过加密处理),然后以广播的形式上传。导弹接收到指令站的信息并解密后,根据伪随机码检索到传给自己的信息,并根据该信息进行弹上响应,从而修正自己的弹道。
第七步:若需要多个指令站接力完成导弹的制导,那么将会重复第六步的工作,直到导弹被统一制导指令场导引到末制导段或击毁目标。
3 统一制导指令场关键技术
从上面的分析可看出,统一制导指令场关键技术主要包括以下几个方面。
1)从虚拟平台间的任务协调层次分析,主要包括两方面的内容:
①虚拟平台的构建
地理上和空间上分散的传感器系统、防空导弹系统、指令站系统及指控中心相互配套,借助通信网络进行信息交互和协作,形成完成特定防空作战任务的临时动态组织,即虚拟平台。
文献[6]提出了类似虚拟平台的概念“虚拟拦截联盟”,并采用基于角色的工作流模型对“虚拟拦截联盟”进行描述和建模。文献[7]基于MAS理论提出任务分配问题求解的联盟形成方法,用以解决单个Agent不能完成的任务或群体解决更有效的任务分配问题。文献[8]分析了当单个机器人不能完成任务,且任务不能分解时,应用多Agent 系统的联盟形成方法解决多机器人的分组协作执行任务。
上述文献均采用联盟的思想解决特定的任务,这与虚拟平台的构建在本质上是相似的,因此对虚拟平台的构建应具有启发意义。
根据考证,傣族的纺织历史可追溯至西汉时期。东汉以后,傣族的手工业已很发达,到了元明时期,傣族的织锦工艺更为精湛,甚至出现了专为宫廷和贵族织锦的手工业者。其中以德宏傣族地区的“干崖布”、明洪武年间的西双版纳傣族的“丝幔帐”及“绒棉”最具代表性。
②虚拟平台间任务分配冲突消解
虚拟平台间任务分配冲突消解技术协调不同虚拟平台间防空作战任务分配问题,避免因任务分配发生冲突而影响系统的整体作战效能。
国民经济领域关于虚拟企业间的任务分配冲突消解技术已有大量的研究成果,如基于规则的冲突解决、基于实例的冲突解决、基于约束的冲突解决和基于协商的方法等[9]。这些方法与虚拟平台间任务分配冲突消解具有相似之处,对于解决该问题应具有一定的启发意义。
2)从虚拟平台内的任务协调层次分析,主要包括三方面的内容:
①多传感器-多目标分配
虚拟平台内,多传感器系统在地理上和空间上是分散的,各个传感器系统的性能参数也可能不相同,即所能跟踪的目标的距离和数量(批次)不相同。为了不遗漏目标和优化资源的配置,需要协调各传感器系统所需跟踪的目标,充分发挥传感器系统的功能。
文献[10]研究了基于 Agent的平台级传感器传感器-目标分配,通过任务Agent与传感器Agent之间信息的买卖,实现传感器的选择与调度。
②多武器-多目标分配
防空武器系统需要明确各自需拦击的目标,以避免遗漏目标和重复拦击目标,这样可避免防空武器的浪费,提高资源的利用率,同时可避免相邻近的防空导弹之间的相互干扰而影响防空作战效能。防空武器对目标的拦击,其发射阶段依赖传感器所跟踪到的对应目标的位置信息和运动参数。
文献[11]建立了基于 MAS的多武器-多目标分布式分配结构、模型和流程,并以合同网协议为基础,研究了多武器-多目标分布式分配求解流程及算法。
③多指令站-多武器分配
各指令站需要明确各自需要制导的导弹,这样才能根据接收到的传感器对目标的跟踪信息和拦击该目标的导弹的位置信息及运动参数,生成制导指令,为导弹提供制导服务。
3)指令站的多导弹制导能力
指令站的多导弹制导能力既包括同种型号、制导体制的多导弹制导能力,也包括不同型号、不同制导体制的多导弹制导能力。文献[3]从通信的角度分析了指令站采用直接扩频码分多址技术可实现对多导弹进行制导,并认为该技术十分适合应用于网络化协同作战模式下的统一制导指令场。若能在此基础上实现制导指令的转换与分发,则指令站可同时对不同型号、不同制导体制的导弹进行制导,即指令站的多导弹制导能力是完全可实现的。
4 结束语
本文探讨了统一制导指令场的结构及功能,分析了统一制导指令场的作战流程,提炼出实现统一制导指令场所需的关键技术,并总结了国内外关于相关技术的研究情况。
网络化防空统一制导指令场技术具有非常广阔的应用前景,特别是当前亟需解决的要地防空问题。目前关于网络化防空统一制导指令场技术的研究很少,希望本文能起到抛砖引玉的作用。
[1]周丰.指控系统信息挖掘与主动感知顶层设计研究[R].国防科学技术大学博士后研究工作报告,2007.
[2]王刚,李为民,何晶.区域防空网络化作战体系结构研究[J].现代防御技术,2003,31(6):19-23.
[3]王碧,郑学合,齐润东.防空导弹武器系统网络化作战统一指令场技术研究[J].现代防御技术,2007,35(2):69-76.
[4]黄俊,等.C4ISR多传感器跟踪资源协同分配方法研究[J].系统仿真学报,2009,21(3):851-867.
[5]王刚.区域防空网络化作战系统综合集成研究[D].西安:空军工程大学博士学位论文,2003.
[6]毛昭军,李云芝,蔡业泉.网络化防空导弹体系虚拟拦截联盟研究[J].军事运筹与系统工程,2007,21(1):17-21.
[7]Onn Shehory,Sarit Kraus.Methods for task allocation via agent coalition formation [J].Artificial Intelligence 101(1998):165-200.
[8]鲁玉良.基于Agent的多机器人的任务协作研究[D].北京:北京工业大学硕士学位论文,2003年5月.
[9]周 伟.基于多智能体协作的虚拟企业任务调度和冲突消解研究[D].长沙:中南大学博士学位论文,2004.
[10]Dan Stromberg,Maria Andersson,Fredrik Lantz.On Platform-Based Sensor Management[C].ISIF,Las Vegas,Nevada.2002:600-607.
[11]陈华东.基于多智能体系统的编队武器目标分布式分配体系和算法研究[D].武汉:海军工程大学博士学位论文,2010.
猜你喜欢
军事文摘(2022年11期)2022-06-24
军事文摘(2022年11期)2022-06-24
小哥白尼(军事科学)(2022年2期)2022-05-25
军民两用技术与产品(2021年10期)2021-03-16
学校教育研究(2020年11期)2020-06-08
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
科技传播(2015年20期)2015-03-25
西安航空学院学报(2014年5期)2014-07-13
