
湖州市连续运行卫星定位综合服务系统建设
2010-04-19 03:19钱强强张滇杨国华
城市勘测 2010年3期
钱强强,张滇,杨国华
(1.湖州市测绘院,浙江 湖州 313000; 2.诸暨中专,浙江诸暨 311800)
湖州市连续运行卫星定位综合服务系统建设
钱强强1∗,张滇1,杨国华2
(1.湖州市测绘院,浙江 湖州 313000; 2.诸暨中专,浙江诸暨 311800)
湖州市连续运行卫星定位综合服务系统采用虚拟参考站技术,建有5个永久性基准站,覆盖全市范围约5 800 km2。本系统与湖州市似大地水准面精化成果的结合,使用户可以实时得到平面坐标、高程,真正实现了实时三维空间定位的功能。
HUZCORS;网络RTK;VRS;似大地水准面模型
1 引 言
湖州市位于浙江省西北部,北濒太湖,与江苏省接壤,南临杭州市;东接嘉兴市,西与安徽省交界,总面积5 800 km2。湖州地处长三角地区,近年来经济发展迅猛,城市建设飞速发展,针对城市测绘的要求越来越高。所以,建立湖州市连续运行卫星定位综合服务系统(简称HUZCORS),意义重大。HUZCORS是现代卫星定位、计算机网络、数字通讯等技术进行多方位、高深度的集成,可以全自动、全天候、实时提供网络覆盖区域的高精度三维坐标和时间信息;它是湖州市实现城市现代化管理和数字城市所不可缺少的重要组成部分,满足湖州市基础测绘、国土规划、土地管理、工程建设、形变监测、交通监控、港口管理、公共安全等方面对定位导航服务的需求。
2 系统组成
HUZCORS以GPS全球卫星定位系统的观测技术为主,亦考虑到兼容GLONASS和伽利略系统。本系统由基准站网、数据处理中心、数据传输系统、定位导航数据发播系统、用户应用系统5个部分组成。各个基准站与数据处理中心间通过VPN光纤传输线路连接成一体,形成CORS的专用网络。
基准站网:由5个GPS卫星连续观测跟踪站和相应的数据传输设备组成。负责采集GPS卫星观测数据并输送至数据处理中心,同时提供系统完好性监测服务。
数据处理中心:系统的控制中心,设置在湖州市测绘院信息中心。用于接收各基准站数据,进行数据处理,形成多基准站差分定位数据,组成一定格式的数据文件,分发给用户。
数据传输系统:各基准站数据通过VPN光纤传输至数据处理中心。
数据发播系统:系统通过因特网的形式向用户发播定位导航数据。
用户应用系统:包括用户信息接收系统、网络型RTK定位系统、事后和快速精密定位系统及自主式导航系统和监控定位系统等。
3 系统建立
2008年6月份开始,耗时6个月完成系统基准站建设、数据中心机房建设、网络架构等工作,经过两个月的调试和试运行,HUZCORS系统运行稳定,能够提供给用户实时定位服务。
3.1 基准站的建立
HUZCORS的5个GPS连续运行基准站中两个站为基岩站,3个站为屋顶型基站。站间平均间距约40.7 km,最短站间距为湖州站至长兴站距离 24 km,最长站间距为南浔站至德清站距离达55 km。GPS接收机用标准RJ45接口接入VPN网络,所有设备通过UPS电源供电。
湖州市GPS CORS站相邻点基线南北方向分量测量的精度平均值为±0.3 mm,东西方向分量测量的精度平均值为±0.4 mm;相邻GPS点基线垂直分量测量的精度平均值为±1.4 mm;湖州市GPS CORS站基线相对中误差最大值为7.93×10-8,平均值为1.45×10-8。
湖州市GPS CORS站空间直角坐标X方向的精度平均值为±0.6 mm,Y方向的精度平均值为±0.9 mm,Z方向的精度平均值为±0.6 mm;湖州市GPS CORS站南北方向的精度平均值为±0.3 mm,东西方向的精度平均值为±0.4 mm,高程方向的精度平均值为±1.2 mm。
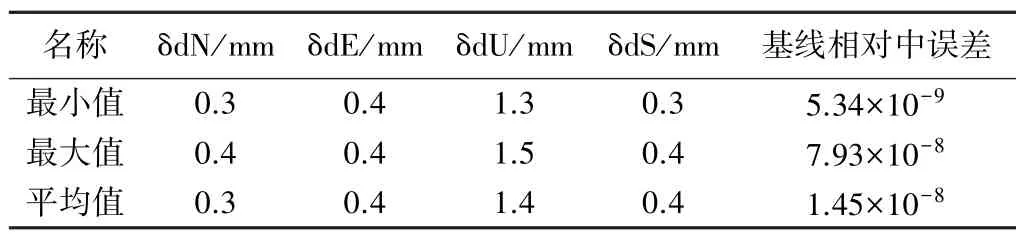
湖州市GPS CORS站基线精度统计表 表1
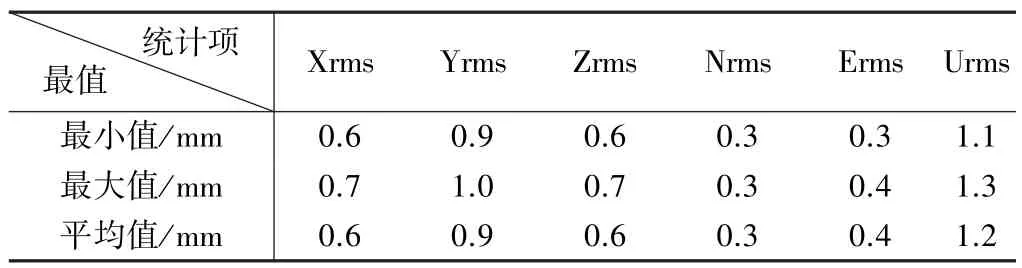
湖州市GPS CORS站坐标精度统计表 表2
3.2 数据处理中心架构
数据处理中心是系统的管理与数据处理中心,它按照国家对机房建设设计的规范要求进行建设。机房恒温、无尘的工作环境能保证 24 h安全运行,并且具有实用、可靠、可扩展及升级等性能。数据中心处理软件选用Trimble公司提供的GPSNet软件。数据中心由一台服务器完成数据处理、分发、用户管理等工作,另一台服务器做备份机。
3.3 数据通讯的选定
(1)基准站到数据中心
基准站到数据中心利用光纤VPN网进行网络连接,带宽为2 M;Net R5 GPS接收机通过RJ45端口直接接入VPN网络。这种方式减少了连接的中间环节,最大限度减少数据传输的时间延迟,实现网络数据的实时传输,保证了网络通讯的稳定性。该方式同时也作为数据中心原始数据完好性检验的通讯链路,确保了数据中心记录的观测数据和接收机内存中的原始数据一致。控制中心直接通过VPN网络,利用TCP/IP协议,用IE浏览器可以直接对接收机进行远程的设置和监控。
(2)数据中心到流动站
使用GPRS通讯方式的用户可通过因特网访问数据中心固定IP地址的方式获取系统提供的数据服务。湖州大部分地区已开通EDGE网络,其最高理论传输速度可达 384 kbps;GPRS具有永远在线、按流量计费、高速传输、语音数据自由切换等特点,GPRS可以支持200 kbps左右的传输速率。对于事后处理所要求的数据,采用Internet方式访问系统运行网站。
4 与湖州市似大地水准面精化模型的有效结合
GPS定位可以便捷地获得点位的位置,但如果缺乏一个具有相应精度和高分辨率的似大地水准面模型,会使大地高至正常高的转换中高程精度严重损失。似大地水准面精化模型不仅是采用GPS技术代替常规水准测量的基础,也是实现城市精密三维空间测量的重要环节。湖州市似大地水准面精化项目是利用现代大地测量的高新技术手段进行高精度GPS、水准测量,进而利用湖州市的地面和临近区域的重力资料、高分辨率地形数据、卫星测高数据、GPS水准资料和最新地球重力场模型,最终确定出湖州市域内高分辨率、厘米级高精度似大地水准面的格网数值模型。湖州似大地水准面成果的应用,大大提高了基础数据的质量和更新的速度,为“数字湖州”奠定了基础,对城市现代化建设具有极大的作用。更重要的是,由GPS、水准测量、重力数据等综合精化的高精度、高分辨率湖州市似大地水准面成果将可以实现与湖州市连续运行卫星定位综合服务系统(HUZCORS)的无缝融合、资源共享,提供高精度的GPS高程框架,得到城市规划、建设、管理所真正需要的湖州85高程系统,使得该卫星定位服务系统真正具备提供全动态、全覆盖、实时三维高精度测量的能力,从而倍增系统的效能。
5 系统精度
9月13日~9月30日,湖州市测绘院采用Trimble R8 GNSS接收机,对湖州市GPS D级控制网中26个点进行检测,每个点重新初始化测量3次,获取3组90个观测数据。系统覆盖网内有11个点,网外有15个,最远点距离36.5 km。同时,采用徕卡ATX1250、华测X91、中海达V8接收机分别进行6个点的测试。统计测试结果表明,系统内外符合精度和兼容性都达到系统设计指标。

精度统计表(单位/m) 表3

高程精度统计表(单位/m) 表4
6 结 语
HUZCORS系统的基本功能就是满足城市测绘工作需要。湖州市测绘部门每天要从事大量的城市基础测绘工作,如大比例尺地形测图、放线、管线探测、地籍、房产测量、建筑物变形监测等。系统运行后,用户可以实现实时动态厘米级精度的定位应用,适用于城市实时控制测量,实时小区域大比例尺测图与修测、工程放样和工程监测等;可以实现实时动态米级、分米级精度的定位应用,适用于相应精度的测图应用或GIS数据采集。系统可以逐步建立起从静态、动态到高动态,从事后、准实时到实时,从毫米级、厘米级到亚米级精度的城市基础信息服务体系,并建立城市空间基础设施的三维、动态、地心坐标参考框架。湖州市连续运行卫星定位综合服务系统的建设及应用是湖州市大地测量技术的一重大改革,彻底改变了过去城市测量静态的、平面加高程的定位方式,真正实现了湖州市城市三维空间定位,将会极大地提高生产力,也为城市测绘现代化的发展提供了可能,搭建了城市三维导航定位的空间基础平台。为构建“数字湖州”地理空间奠定了基础框架。
[1]刘经南,刘晖.连续运行卫星定位服务系统——城市空间数据的基础设施[J].地理空间信息,2003(3)
[2]马建平,高星伟,程鹏飞.浙江省连续运行卫星定位服务系统技术设计与试验[J].测绘科学,2008(5)
[3]CH/T 2008-2005-2005.全球导航卫星定位系统连续运行参考站网建设规范[S].
[4]GB/T 18314-2001.全球定位系统(GPS)测量规范[S].
Huzhou Continuous Operational Reference System Construction
Qian QiangQiang1,Zhang Dian1,Yang GuoHua2
(1.Huzhou Institute of Surveying and Mapping,Huzhou 313000,China;2.Zhuji Secondary Profession School,Zhuji 311800,China)
Huzhou Continuous Operational Reference System that applies the technology of the VRS,had been made of 5 permanent reference stations.The covered area of the HUZCORS is 5800 square kilomenters.In the whole city the user can receives plane coordination and normal height throught both the HUZCORS and the quasigeoid model.So the system realizes the location function of three-coordination in real time.
HUZCORS;Network RTK;VRS;Quasigeoid Model
1672-8262(2010)03-59-03
P228
B
2009—09—14
钱强强(1977—),男,工程师,主要从事测绘生产、管理工作。
猜你喜欢
农业科技通讯(2023年1期)2023-02-12
心理学报(2022年4期)2022-04-12
人民周刊(2022年24期)2022-02-07
人民周刊(2022年24期)2022-02-07
水泵技术(2021年3期)2021-08-14
小学时代(2019年11期)2019-01-11
中国惯性技术学报(2015年1期)2015-12-19
商品与质量·消费研究(2013年6期)2013-08-06
测绘科学与工程(2013年3期)2013-03-11
测绘科学与工程(2013年2期)2013-03-11
