
超高速碰撞碎片云的四序列激光阴影照相
2010-04-17 10:35:44谢爱民罗锦阳
实验流体力学 2010年1期
柳 森,谢爱民,黄 洁,宋 强,罗锦阳
(中国空气动力研究与发展中心,四川绵阳 621000)
0 引 言
随着太空垃圾种类和数量的日益增多,人们愈加关心这些空间碎片对航天器的破坏[1,3-4]。在地面进行超高速碰撞试验是研究航天器抗空间碎片撞击性能的主要方法之一,而对碰撞产生的碎片云发展过程进行记录分析是其中重要研究内容。为此,在中国空气动力研究与发展中心超高速所碰撞靶上发展了专用的超高速碰撞靶,开展了一系列超高速碰撞试验研究。试验中,弹丸以最高约7.3km/s的速度撞击靶材,弹丸速度、碎片云形状等被实时记录供事后分析。
为了观测弹丸碰撞靶材所产生碎片云的发展变化过程,国外往往使用高速摄影机、X光照相技术记录整个碰撞过程的碎片云生成过程,但这些设备价格昂贵,研制周期长。为此,在2004年发展了单幅激光阴影照相技术[1],在解决了一系列衍射和干涉效应等影响后成功地获得了清晰的碎片云照片。但该技术在每次碰撞试验时只能获得一幅碎片云阴影照片,而为了在每次试验中获得 2幅以上的序列照片,在2005年又发展了基于“双光源空间分离技术”的两序列激光阴影照相技术[5]。在采用小孔滤波、光束角放大和补偿式滤光等技术,并克服了常规激光阴影照相系统容易产生的衍射[1]、干涉效应后,获得了撞击速度v=4.5km/s时清晰的两序列碎片云图像,见图1,这些图像的获得为碰撞试验的深入研究提供了重要的数据[6-7]。
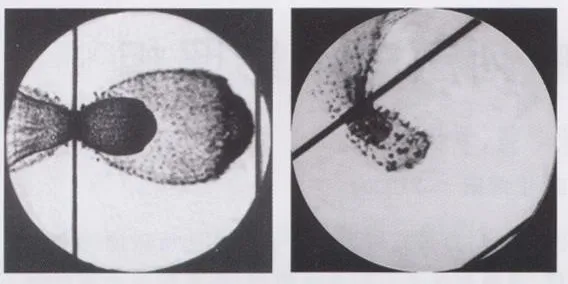
图1 碎片云两序列阴影照片Fig.1 Two sequence laser shadowgraph of debris cloud
随着超高速碰撞研究的发展,目前的两序列激光阴影照相系统已满足不了试验需要,为了在有限的经费和时间前提下实现超高速摄影机的序列照相功能,以获得超高速碰撞试验中碎片云的发展过程或模型的飞行姿态变化,在现有两序列激光阴影照相的基础上又发展了四序列激光阴影照相系统,并在此基础上将进一步发展八序列激光阴影照相系统。
笔者对四序列激光阴影照相系统的原理、调试及试验结果等内容进行了描述。
1 四序列激光阴影照相技术
笔者发展的四序列激光阴影照相技术,是在前面描述的两序列阴影照相基础上,对光源系统及图像接收端等进行了改进(见图2),包括对光源系统的结构进行了优化设计、对图像接收端的光路进行了重新设计。通过该技术实现了在一次试验中清晰地获得4个不同时刻同一目标的4幅碎片云(模型姿态)阴影照片,根据这些照片可得到碎片云的轮廓发展变化或模型撞击靶材前的姿态变化过程,同时根据照片可准确算出碎片云发展或弹丸的飞行速度。
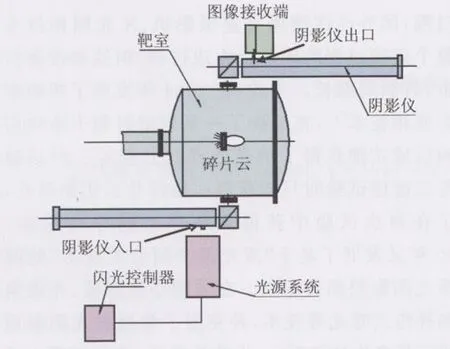
图2 碎片云四序列照相系统示意图Fig.2 Schematic diagram of 4 sequence laser shadowgraph for debris cloud
1.1 序列照相要求
因整个碰撞过程持续时间只有几百微秒,而碎片云的运行速度达到数千米每秒,要使照片上的碎片云很清晰,则每张照片的曝光时间不能太长(通常小于几百纳秒)。另外,要实现序列照相,一方面要满足不同时刻穿过测试区域的光束方向、几何形状必须近似或相同,另一方面图像的接收介质(见图2的图像接收端)在不同时刻必须要在空间分开,同时,序列的时间间隔必须可控制以满足不同试验状态照相要求。
1.2 四序列间隔的控制和测量
四序列照相系统的光源使用4套独立的激光光源(见图2的光源系统),每套光源的闪光时间间隔由图2中的闪光控制器进行控制,每个序列的最小间隔时间为1μ s。同时,每套光源的具体闪光时间可进行监测,监测的时间误差小于1μ s(与数采系统的精度有关)。这样,4幅照片的拍摄时间间隔可根据试验需要进行事先设置,并根据这些照片就可较准确推算出相关的碰撞参数。
1.3 四序列阴影照片空间分离技术
为了实现不同时刻不同碎片云阴影照片在空间独立分开,整个照相系统使用了多光源空间分离技术和偏振分光技术。
(1)多光源空间分离技术实现序列照相原理
4套激光光源光束进入阴影仪入口时发生空间的分离,不同光束在碎片云测试区域发生重合,同时在图像接收端不同光束又在空间发生分离。
为了提高多束光在测试区域的重合性,不同光束在阴影仪的入口和出口处(见图2)的空间分离度不能太大。
(2)偏振分光法实现四序列照相原理[5]
由于该激光束光为偏振光,通过偏振片时如果偏振片的光轴方向与激光束的偏振方向一致,则激光束全部通过,否则,激光束不能全部通过偏振片。图3中偏振片1把自然光过滤为偏振光(该偏振光相当于激光光束),改变偏振片2的角度时,则原来偏振光中在偏振片2光轴方向的分量的光才可以通过偏振片2。当偏振片2的光轴角度和偏振光的振动方向垂直时,则在理论上所有的光都不能通过。根据此原理,使图2中光源系统的激光束偏振方向不同,在像面接收端分别放置不同光轴方向的偏振片,这样,在每套成像系统及像接受底片上只有某个偏振方向的光束,从而实现了不同序列时刻激光器闪光,而分别在不同底片上记录被测对象的阴影图像。
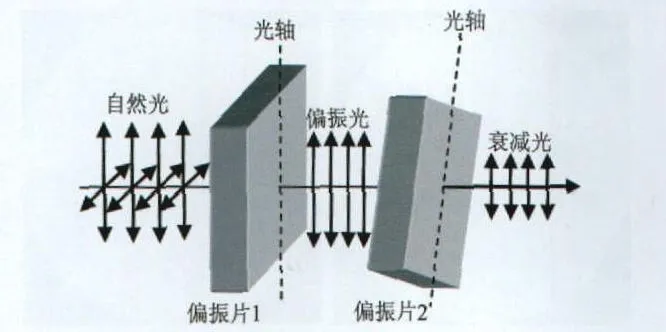
图3 偏振分光示意图Fig.3 Schematic diagram of polarization decomposition
(3)两种分光技术的特点分析
利用光源空间分离的方法实现序列照相的优点是:不同光束相互干扰比较小,容易实现不同光路的分离;缺点是:光路结构复杂,不同光束穿过测速测试区域时有一定的偏差角度。
利用偏振技术实现序列照相的优点是:光路在测试区域的重合性高,以实现整个照相系统对同一目标进行成像;其缺点是偏振光束穿过系列光学器件后,因为光学器件表面存在的不足,导致部分激光束偏振方向发生改变,即使进入阴影仪入口的激光束偏振方向互相垂直,偏振片也不可能把这两束光完全分开,而且4束激光不可能实现每两束光的偏振方向互相垂直,这样就会造成照片上出现不同个时刻的碎片云重叠图像。
(4)两种方法的结合实现四序列激光阴影照相
因为这两种方法各有自己的特点,而把这两种方法相结合,则一方面可满足空间的分离角度减小,另一方面可满足不同光束在空间进行完全分离。
在调试中需不断反复改变空间分离夹角,并在像面接收端观测4个像面的分离距离,以满足在最小分离角度下实现4套光路在空间的分离。
另外,在每套光路中需要增加一套补偿透镜组,以在每组成像物镜前面形成一个实焦点,同时设计与补偿透镜组及阴影仪光路相适应的配套成像物镜组,以实现对测试区域的清晰成像。
1.4 提高成像质量采取的措施
系统使用激光光源,因其单色性及光学器件多,成像画面很容易受到杂光、衍射和干涉效应的影响。
(1)消除杂光对成像画面的干扰
每套激光发出的激光束在周围都弥散着很多能量较低的杂光,每束光照射到透射光学器件后会发生多次反射透射而形成多个光斑(即使对光学器件镀了增透膜),也会产生很多不期望的杂光,它们进入成像系统时要相互干扰,导致在底片上形成不同时刻的阴影图像相互重叠,影响成像的质量。
解决办法是:阴影仪扩束镜使用正透镜(具有实焦点),并在扩束镜的焦点处放置直径比较小的小孔,以滤去激光周围的弥散光。同时在像面接收端各个实焦点处放置小孔,以滤掉光束经系列光学元件后反复反射、透射形成的杂散光,从而避免杂光对成像画面的干扰。
(2)消除衍射、干涉效应及自发光的干扰
整个系统的光学元器件将近百件,而光学器件又主要分布在像面接收端,因光束在这些光学件表面多次反射和透射,容易形成多光束干涉条纹[9];任何一块光学器件表面的不洁或光洁度受到破坏时都容易产生非期望的衍射条纹;同时,碰撞瞬间强烈的自发光也会影响成像画面的清晰度。
解决的办法是:调试中采用光路追迹法依次检查每块光学器件,一旦发现某块光学件表面的不洁产生了衍射环时,必须更换该光学件或者旋转该器件并仔细观察光斑,直到无明显的衍射环。在图像接收端,必须仔细观察光束通过某光学器件时是否有光束从其表面反射,再透射进入,一旦发现时可以改变某些光学器件的角度直到不发生反复的透射、反射、透射现象,用此方法可以防止多光束干涉条纹的发生。
为了保证碰撞瞬间强烈自发光不干扰测试区域成像,国外常见的方法是使用光电快门,以减小自发光对成像底片的曝光时间。但该快门结构复杂,价格比较昂贵。解决的办法同碎片云单幅照相系统一样[1]即使用补偿式滤光技术消除自发光。
2 超高速碰撞碎片云成像与分析
在上述四序列激光阴影照相技术基础上,在超高速碰撞靶上建立了四序列照相系统,图4为光源发射端实物图。成像系统采用双组透镜结构,并使用普通135型相机机身和ISO27航空胶片,成像画幅尺寸约Φ 20mm。
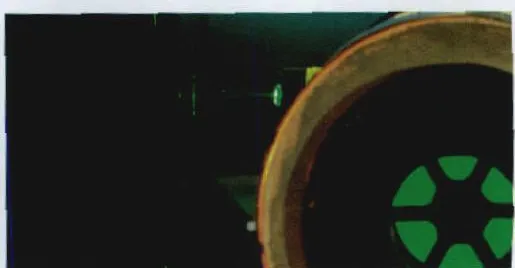
图4 四序列照相系统光源Fig.4 Light source of four sequence camera system
运用该照相系统分别进行了多次试验,在试验过程中获得了多幅碎片云阴影照片。部分照片因为系统部分光学器件设置得不恰当,获得的照片质量不理想,在经过对系统的反复调试后最终获得了清晰的碎片云四序列激光阴影照片。
2.1 超高速碰撞靶
该靶由口径7.6mm二级轻气炮、测控系统、靶室/真空系统3部分组成。测控系统包括模型探测器、四序列照相系统、光辐射计。弹丸的速度从几百米/秒至7.3km/s,测控系统的模型探测器可探测直径小于1mm的弹丸,并为其它测试设备提供控制信号,例如该控制信号在提供四序列照相系统的闪光控制器一个信号后,闪光控制器就可以根据事前设置的序列间隔时间对激光器进行序列闪光控制。
2.2 试验条件
试验中靶室压力100Pa,弹丸速度为(4~7.3) km/s,弹丸直径约为5mm,靶材为铝质Whipple屏。
2.3 试验结果与分析
图5中因为滤光措施不够,碎片云被大量自发光掩盖。在图6中,因为在图像接收端的小孔尺寸选择不当,部分激光束被小孔遮挡,产生了大量衍射条纹,使得该照片无法使用。
图5 受自发光干扰的碎片云阴影照片Fig.5 Shadowgraph of debris cloud disturbed by spontaneous light
图6 受衍射干扰的碎片云阴影照片Fig.6 Shadowgraph of debris cloud disturbed by diffraction
在对该系统进行反复调试后,最终获得了清晰的碎片云四序列激光阴影照片,如图7所示。该试验参数为:弹丸速度为4.62km/s,弹丸直径4.98mm,靶厚2.3mm,靶材为铝,屏间距为100mm。
图7 碎片云四序列激光阴影照片Fig.7 Four sequence laser shadowgraph of debris cloud
因为4套激光光源的闪光脉宽时间都约为10ns,在该曝光时间内,碎片云的运动量小于5×10-3mm,因此在底片上图像不会因碎片云的高速运动(即使速度达到10km/s)引起模糊。
从图7(a)可以看出,在该时刻,碎片云比较集中,并首次发现反溅碎片云轮廓出现了剧烈弯曲现象,经过初步分析后认为,因为撞击点沿靶材方向的碎片云速度较高,在某一时刻形成了图7(a)所示的碎片云形状。其它3幅图中的碎片云在弹丸运动及沿靶材方向都得到了一定的展开。
通过图像处理分析,可以得到碎片云在不同时刻沿弹丸飞行方向的空间位移量,并根据4序列时间间隔大小,获得了图7(a)和图7(b)的碎片云在弹丸飞行方向上的平均速度为3.40km/s,图7(b)和图7(c)的碎片云在弹丸飞行方向上的平均速度为3.49km/s,图7(c)和图7(d)的碎片云在弹丸飞行方向上的平均速度为3.40km/s。由该数据表明,该类弹丸撞击铝靶后的碎片云速度仍旧很高,碎片云刚形成时可能在加速,在获得图7(c)和图7(d)照片时刻之间的碎片云已经减速。同时由该数据表明,该类弹丸撞击铝靶后的碎片云速度仍旧很高,但比弹丸的速度都低。根据照片中碎片云的轮廓进行速度计算时的误差来源主要有激光器闪光的时间和碎片云位移的计算。
根据该四序列碎片云照片,还可以得到碎片云部分特征点的速度以及轮廓的角度变化,其具体分析将在后续的文章中进行描述。
3 结 论
(1)在气动中心超高速所的碰撞靶上建立了四序列激光阴影照相系统,并清晰地获得了弹丸在速度v=4.63km/s时的碎片云阴影照片;
(2)该四序列照相系统最小间隔时间可以设置为1μ s,曝光时间为10ns,并很好地克服了衍射和干涉效应及自发光的影响,在一次试验中可清晰地获得4幅碎片云激光阴影照片,基本满足碰撞试验研究需要。同时,该系统也可用于其它超高速过程(如超高速飞行器高温流场)的序列照相中;
(3)目前图像采用胶片接收,下一步将使用高分辨率CCD进行接收。该系统预留8序列照相接口,并可以发展为8序列或更多序列激光阴影照相系统。
致谢:
在该系统的研制和调试过程中,部绍清、李毅、石安华、简和祥、马平、于哲峰等同志提出了许多宝贵的建议,同时,周智炫、罗庆、任磊生、王娣、何贵慎及碰撞课题组其他同志也参与了部分工作,在此表示衷心的感谢。
[1]柳森,谢爱民,黄洁,等.超高速碰撞碎片云激光阴影照相技术[J].流体力学实验与测量,2005,19(2):35-39.
[2]杨祖清,谢爱民,王庆歆.高焓瞬态球模型流场的纹影诊断[C]//第五届全国流动显示会议论文集,2002.
[3]柳森,李毅.空间碎片/流星弹丸对空间站的危害与对策[J].载人航天,2003,(3):15-19.
[4]柳森,李毅,黄洁,谢爱民,等.用于数值仿真的Whipple屏超高速撞击试验结果[J].宇航学报,2005,26(4):505-508.
[5]XIE Ai-min,LIU Sen,HUANG Jie.Sequence laser shadowgraph for the visualization of hypervelocity impact debris cloud[C]//8th International Symposium on Fluid Control,Measurement and Visualization,22-25 August, 2005.
[6]陈鲲等.舱外航天服抗空间碎片超高速撞击技术[C]//第四界全国空间碎片专题研讨会,2007.
[7]牛雯霞等.不锈钢充气压力容器超高速碰撞试验研究[C]//第四界全国空间碎片专题研讨会,2007.
[8]杨祖清等.流动显示技术[M].北京:国防工业出版社, 2002.
[9]梁铨廷.物理光学[M].北京:机械工业出版社,1986.
猜你喜欢
激光技术(2024年1期)2024-04-03 12:09:02
广东石油化工学院学报(2022年4期)2022-09-13 01:36:28
小学生必读(中年级版)(2021年12期)2021-12-02 09:04:43
奥秘(2021年3期)2021-04-12 15:10:26
金桥(2018年1期)2018-09-28 02:24:38
四川冶金(2018年1期)2018-09-25 02:39:26
北京航空航天大学学报(2016年8期)2016-11-16 01:51:08
光学精密工程(2016年6期)2016-11-07 09:08:16
红领巾·探索(2014年1期)2015-03-16 16:35:14
弹箭与制导学报(2015年1期)2015-03-11 15:32:09
