
风洞虚拟飞行试验技术初步研究
2010-04-15 10:54:48胡静,李潜
实验流体力学 2010年1期
胡 静 ,李 潜
(中国航天空气动力技术研究院,北京 100074)
0 引 言
传统上,风洞试验是提供飞行器设计和控制系统设计所需要的气动力系数和导数,利用这些气动力系数和导数,再经过地面加载试验、飞行仿真分析,进行飞行器的设计,然后通过飞行试验加以验证。随着飞行器机动特性的不断提高,对飞行器性能提出了更高的要求,但目前尚没有能较好地描述和预示飞行器在大迎角机动时的过载、稳定性和机动时所需控制力的地面试验方法。“风洞虚拟飞行试验”(Virtual Flight Testing)则正是一种可能的在风洞中实现飞行器飞行动力学特性、飞行控制系统、导航系统综合验证的试验技术。“风洞虚拟飞行试验”(VFT)是在风洞中直接进行飞行力学试验的技术,可以在风洞中直接得到飞行器的飞行性能预估结果。
风洞虚拟飞行试验的原理和步骤如图1所示。风洞虚拟飞行试验中,将包括自动驾驶仪、惯性传感器、舵面作动器等装置的飞行器缩比模型用一个专门的系统支撑,以允许模型能自由俯仰、偏航、滚转甚至锥动。由风洞外的控制系统控制模型舵面运动,在定常或非定常气动力作用下,模型实时改变姿态,表现出固有的飞行动力学特性。在这个过程中,测量的气动载荷和模型运动姿态数据反馈给风洞外的控制系统,修正控制命令,并将新的控制命令发送给模型的舵面。通过不断重复这个循环,模型在风洞中实现虚拟“飞行”。从而,飞行器和控制系统的性能就能得到证实和评估[1]。
虚拟飞行试验可了解和测量气动力对飞行器飞行性能的实时影响,有助于改进气动力数学模型和促进高性能飞行器和控制系统的设计。过去,风洞试验仅提供飞行器的气动力数据,而风洞虚拟飞行试验除了提供气动力特性数据外,还可以直接给出气动力与控制力耦合作用下的飞行器飞行力学特性。从而将飞行动力学、空气动力学、结构动力学、控制理论等多学科问题综合研究,更有利于武器性能研究。

图1 虚拟飞行试验原理Fig.1 Virtual fight test concept
虚拟飞行这一概念的提出正式见于上世纪90年代中期,美国AEDC对虚拟飞行试验(VFT)进行了较全面的理论研究,系统地阐述了虚拟飞行试验的概念、作用以及与飞行试验的关系,并对该技术的可行性进行了探讨[2]。2002年,B.H.Mills和F.C.Lawrence首次在风洞中成功实现虚拟飞行试验,再现了导弹在风洞中滚转自锁现象,验证了虚拟飞行试验能提供真实飞行环境中模型的实时运动,再现飞行器实际飞行特性[1]。几乎同时,J.C.Magill和S.D.Wehe成功模拟了三自由度飞行,并引进闭环控制系统实现了姿态稳定性试验和导引试验。之后,J.C.Magill针对试验装置的气动干扰较大进行了改进,在风洞中检验飞行器的导引、控制系统和飞行稳定性等。同时,G.Gebert和J.Evers在进行虚拟飞行试验理论论证时,率先建立了一个普遍的数学模型分析试验数据,对三自由度(两个平移和一个滚转自由度)进行仿真后与真实自由飞行进行比较,发现吻合良好。
通过研制组合滚转轴承系统、控制面作动系统;在低速风洞建立一套风洞虚拟飞行试验原理性验证试验装置;进行了非定常气动力对控制面动作的实时响应风洞试验,由此分析导弹的飞行性能,验证虚拟飞行试验的可行性。
1 试验模型设计
1.1 组合滚转轴承系统设计
选择气动力数据已知的Basic Finner作为模型设计的原型。模型分为三段:模型头部、中部和尾部。其中头部与尾部通过内部的支杆连成一体,而该支杆与模型中部外筒通过一对组合滚转球轴承连接,这就使得导弹的头部和尾部相对于导弹中部可自由滚转,从而实现模型的自由滚转运动。
组合滚转轴承设计如图2所示,内部轴向支杆两端分别连接模型头部和尾部,外部套上了一对高精度深沟球轴承和一对止推球轴承,当模型在风洞中运动时能同时承受径向载荷和轴向载荷;且这两对球轴承对称布置在模型重心前后,可在偏航运动时承受偏航力矩,其重心前后位置可调节,以平衡不同大小的偏航力矩。这样保证了模型在自由运动时滚转球轴承的正常旋转。
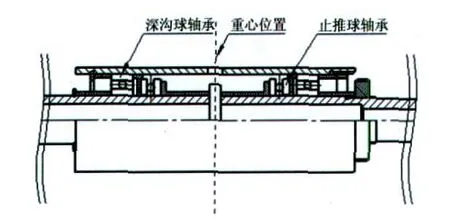
图2 模型滚转轴承系统设计示意图Fig.2 Configuration of roll bearings
1.2 舵面作动机械系统设计
根据已有气动数据估算的铰链力矩和模型尺寸要求,选择Think enginery微型伺服电机来驱动舵面偏转。该电机堵转转矩0.5N◦m,远大于本模型的最大铰链力矩(0.002~0.04N◦m),工作电压为6V时,转速为18r/min。为控制模型在风洞中实现滚转与偏航运动,需要在模型内腔放入四个微型电机用以分别控制四个舵面运动。由于空间限制,伺服电机只能在模型内腔沿轴向分布,与舵轴成90°夹角。为传递扭矩,自行设计、加工了齿轮减速传动箱(如图3所示),将伺服电机扭矩传递给舵面。设计的齿轮减速箱模数为0.5,传动比为1∶2。

图3 舵面作动系统Fig.3 Configuration of fin actors
1.3 舵面作动运动控制系统设计
选择8通道继电器开关量PCI-7250控制卡,通过控制卡选择不同的电子开关闭合,实现对电机电压的极向改变(控制电路如图4所示),从而改变伺服电机的转向,电机扭矩经齿轮直角减速箱后,传递给舵面,最终改变舵面偏转方向;而舵面偏转的角度则通过控制开关闭合时间长短实现,根据选用的6V高精度直流稳压电源,对应的电机转速为18r/min,经过齿轮减速箱减速后,舵面偏转角速度大概为1°/18ms。其中图4中电机1和3控制方向舵偏转,实现偏航运动;四个电机同时工作带动四个舵面偏转实现模型滚转运动。控制程序用LabVIEW平台编写。
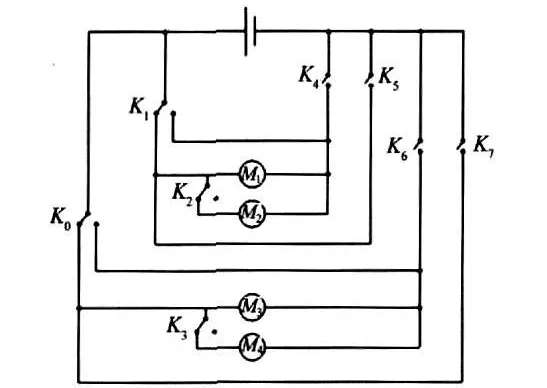
图4 四个电机联合控制电路Fig.4 Control circuit of servo-actuator
模型为全长 540mm,长细比 10∶1,翼展为108mm。全弹重心位置在全模型的61%处。如图5所示,模型在质心位置被8根张线悬挂在风洞中。上下4根张线的作用点在同一点,使模型可绕过重心的纵向轴偏航运动。
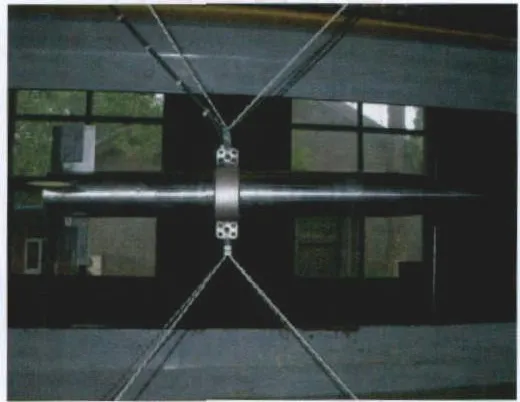
图5 模型悬挂图Fig.5 Model suspended in wind tunnel
2 风洞试验
2.1 试验设备
试验在航天空气动力技术研究院第一研究部FD-10低速风洞中进行。风洞试验段截面尺寸为0.6m×0.6m,试验风速12m/s,风洞两侧壁设有观察窗。试验中张线需穿过风洞外壁,因此对风洞上下壁板进行了更换和打孔。试验风速采用风速测速仪测量,风速采集卡为ISA-6325A卡,采集速率66kHz/s。
2.2 自由滚转试验
试验目的是检查模型系统的对称性和设计的滚转轴承的摩阻大小。如图5所示试验模型悬挂在风洞中,俯仰角、偏航角、滚转角为0°,试验发现风洞起动后,模型在来流的作用下开始滚转。分析原因是选择的弹体模型Bassic Finner为一枚旋转稳定弹,其滚转惯量较小,且在模型设计时引入的机械轴承等构件的滚转摩擦阻力相对也小,因此在较小的滚转力矩下便可产生偏转。在零度舵偏时产生小滚转说明模型加工时有微小不对称,(这同时证明本项研究所研制的组合滚转轴承的摩阻极小),经改进模型(特别是舵面安装的)对称性后,实现了在零度舵偏时零滚转运动的要求。
2.3 滚转姿态控制试验研究
滚转姿态控制试验是由计算机控制电机转向来改变舵偏角方向,使模型正向或反向滚转。

图6 滚转试验结果Fig.6 The result of rolling test
检验模型正、反向滚转能否恢复到原始平衡位置(γ=0°)时发现试验现象如图6所示:(1)模型初始滚转速度为零时,改变模型舵偏角,气动力作用可使模型开始滚转,这与自由滚转试验相同;(2)模型滚转速度不为零时,舵偏角度归0°,模型滚转角速度变为0,模型维持上一个姿态不再滚转;(3)反向改变模型舵偏角方向,模型产生反向滚转速度,滚转角逐渐减小,过零(γ=0°),然后再向反方向增加。因此,在开环控制时,滚转角“过调现象”是不可避免的。试验证明:对于滚转舵偏的控制可以使模型按控制要求进行滚转或停止滚转,即模型姿态对滚转舵偏具有良好的响应特性;但是在开环控制时模型不可能迅速定位于指定的滚转角。要精确控制滚转角,需要在滚转角改变的过程中实时测量模型的滚转角度,不断控制舵偏角的改变,即需要闭环控制。
从该试验可以看出,模型在风洞中实现了导弹的虚拟滚转,且其滚转现象与真实飞行相似,但若要在风洞中精确控制该模型的滚转姿态角,是一件比较困难的事情,这主要与该导弹为一枚旋转稳定弹的本身气动滚转特性有关。若要实现这一控制,需要在风洞中增加相应的姿态角测量仪器,引入姿态反馈电路。
2.4 偏航试验
偏航试验重点考察偏航角与方向舵偏角之间的关系。试验前准备与滚转试验相同,模型悬挂于风洞正中,各姿态角、各舵偏角均为0°。试验依旧是给阶跃舵偏,舵偏角增值恒为Δδy=1°,每次舵偏间隔时间也固定为2s,每一次脉冲后观测和记录模型姿态变化。

图7 偏航试验结果Fig.7 The result of yaw test
多次重复性试验结果如图7所示:(1)当舵偏角较小的时候,在气动力下,模型开始左右抖动,无明显的偏航角变化。因为模型是通过张线悬挂在风洞中,采用垂直于俯仰-滚转平面的钢丝的自由扭转代替轴承,尽管采用小扭矩的钢丝,对偏航运动限制的作用力仍然较大,在偏航力矩较小的情况下,不足以使模型偏航。这说明该试验的偏航(或俯仰)轴承的摩阻过大 。(2)但是随着方向舵偏角增大(δy≥3°),侧向力持续增大,使得模型可以挣脱悬挂系统的约束,开始出现明显的偏航运动。每一次舵偏角改变后,模型的偏航运动速度都有一个明显的收敛过程,使模型动态地平衡在新的配平位置;且随着方向舵偏角增大,侧向力、力矩增大,偏航角显著增大,并呈近似的线性关系。这说明该试验装置可以提供模型偏航(或俯仰)运动对舵偏控制的响应过程。(3)当方向舵偏转到 δy=7°时,偏航角显著增大,进入非线性区域,并且伴随着偏航运动,模型开始诱导出明显的滚转运动。这证实了大迎角情况下存在的纵横向耦合现象,说明风洞虚拟飞行试验不仅在线性气动力条件下可以提供模型的姿态响应,而且在非线性气动力条件下也可以提供模型的飞行力学特性。大偏航角诱导出滚转耦合运动现象的再现,验证了虚拟飞行试验具有再现大迎角纵横耦合现象的能力。
3 结论与展望
(1)在航天空气动力技术研究院FD-10风洞初步建立了一套虚拟飞行试验系统,探索了在控制面作用下,飞行器的实时响应特性,获得了部分飞行器实现偏航运动和滚转运动所需的控制规律。这是目前国内第一个风洞虚拟飞行试验系统;
(2)研制了组合轴承系统、包括伺服电机和齿轮减速箱的舵面作动系统,以及简易的张线悬挂系统,试验证明这种设计合理可行,保证了风洞虚拟飞行试验的成功进行;
(3)在风洞中完成了模型滚转运动和偏航运动对舵偏角变化的响应试验,在风洞中实现了模型的滚转和偏航对舵偏控制的响应试验。滚转试验中,当舵面有一个固定偏角时,滚转角速度趋于一个恒值,滚转角不断增大,通过控制舵偏角可控制模型的滚转角;偏航试验中,方向舵偏变化可以改变模型的偏航角,模型动态地平衡在新的配平位置,当偏航舵偏角较大时,伴随偏航运动,开始诱导出明显的滚转运动。这些试验现象都验证了风洞虚拟飞行试验技术的可行性,为建立生产风洞的虚拟飞行试验装置打下了基础;
(4)进一步的虚拟飞行试验需要在试验系统中引入角位移、角速度的实时测试系统,并改进偏航轴承系统和张线悬挂系统,以便精确地测量飞行器的姿态响应、稳定性等参数,用以预示飞行器的飞行性能。
[1]LAWRENCE F C,MILLS B H.Status update of the AEDC wind tunnel virtual flight testing development program[R].AIAA-2002-0168.
[2]MANNING 1Lt E,RATLIFF C L,MARQUART E J.Bridging the gap between ground and flight tests virtual flight testing(VFT)[R].AIAA-95-3875.
[3]MAGILL J C,WeHe S D.Initial test of a wire suspension mount for missile virtual flight testing[R].AIAA-2002-0169.
[4]MAGILL J C,CATALDI P,MORENCY J R.Demonstration of a wire suspension system for dynamic wind tunnel testing[R].AIAA-2004-1296.
[5]GEBERT G,KELLY J,LOPEZ J,et al.Wind tunnel based virtual flight testing[R].AIAA-2000-0829.
猜你喜欢
装备环境工程(2022年9期)2022-10-13 05:17:14
兵器装备工程学报(2021年12期)2022-01-11 04:30:04
北京航空航天大学学报(2020年3期)2021-01-14 00:36:50
小哥白尼(野生动物)(2020年3期)2020-07-27 01:54:04
智富时代(2019年2期)2019-04-18 07:44:42
数学大王·中高年级(2018年11期)2018-12-17 08:13:54
测控技术(2018年10期)2018-11-25 09:35:58
北京航空航天大学学报(2017年11期)2017-04-23 08:30:21
飞行力学(2015年5期)2015-03-15 12:04:54
中国铁道科学(2014年1期)2014-06-21 06:34:16
