
摇滚/PIV/压力同步测控技术的发展及其在机翼摇滚研究中的应用
2010-04-07 08:58:52邓学蓥马宝峰
空气动力学学报 2010年2期
荣 臻 ,邓学蓥,王 兵 ,马宝峰
(北京航空航天大学流体力学研究所,北京 100191)
0 引 言
飞机在进行大迎角机动飞行时,经常会出现机翼摇滚现象,这不仅限制飞行包线,而且严重影响飞机的操稳特性,众多学者对翼身组合体机翼摇滚现象进行了大量的研究,实验和分析表明[1-3]:引起翼身组合体摇滚重要的原因之一是前体非对称涡的诱导作用;Ericsson[3]认为翼身组合体机翼摇滚本质上是由前体非对称涡和翼面的相互作用产生的,机翼只是简单地提供了产生驱动摇滚运动的滚转力矩所需的力的作用面。然而研究[4-5]中发现和旋成体大迎角侧向力的实验结果相似,机翼摇滚现象也存在不确定性。最近,邓学蓥、马宝峰[6]对前体涡诱导机翼摇滚运动的确定性进行了研究,发现模型头部设置人工扰动对前体非对称涡诱导的机翼摇滚特性影响起主控作用;同时发现当人工扰动位于迎风面对称面和背风面对称面附近时,模型摇滚呈现等幅极限环振荡运动状态。但目前仅对前体非对称涡诱导机翼摇滚的运动现象进行了研究并取得了初步的认识,而对于引起机翼摇滚的流动特性及机理仍缺乏深入的研究了解,为此,需要针对机翼摇滚过程中呈现的流动演化现象、特性和规律展开研究。因此,发展动态流动测量、控制的风洞实验技术成为研究机翼摇滚流动机理的基础和关键。
目前研究机翼摇滚流动特性的风洞实验中采用最多的方法是自由摇滚以及自由摇滚过程中进行空间流动显示测量[7-9],对摇滚模型空间流场旋涡如何演化以及破裂进行定性分析;而实验技术发展较为完善的是美国Notre Dame大学的 Nelson研究团队[10],他们开发了机翼摇滚运动/流动研究的组合装置,该装置由两部分组成:一是采用低摩阻的气浮轴承作为支杆的自由摇滚装置测量模型运动时间历程;二是利用PID调节方法驱动电机强迫摇滚模型模拟自由摇滚运动的时间历程,同时进行模型表面压力测量或空间流场显示的强迫摇滚装置。强迫摇滚过程中进行压力测量可以避免模型内的测压管路以及导线对摇滚运动的影响,以此可以获得自由摇滚过程中物面压力分布的变化特性及规律。然而,他们在机翼摇滚过程所测的物面压力分布和空间流场显示并不是同时进行的,而是分别在强迫摇滚装置和自由摇滚装置上测得的。在过去机翼摇滚的动态实验中,为了研究其流动机理,人们往往都是针对摇滚过程中某一特定的流动物理量(例如物面压力)而专门设计和研制相应的测控装置进行测量。不同流动物理量的测量是由不同的专用装置在多次实验中完成的,无法在同一实验中完成多个流动物理量的测量。由于动态实验流动特性具有很强的非定常性,在动态实验中企图通过不同次的实验实现同一运动状态下的流动物理量测量,会不可避免地带来不同流动量数据测取的不同步,从而给数据分析和摇滚流动机理的研究带来很大困难。
为了深入研究和认识机翼摇滚中复杂的空间绕流现象和相应的气动压力分布特性,以揭示摇滚运动的流动机理,本文拟在已研制的机翼摇滚运动/流动研究组合装置的基础上[11],发展机翼摇滚/PIV/物面压力分布同步测控技术,以实现在一次实验中能同步测量机翼摇滚运动参数(例如摇滚角)和相应的流动多参数(包括物面流动参数例如压力分布,和空间流动参数例如速度场)。进一步,本文将利用所发展的该同步测控技术研究前体涡诱导机翼摇滚运动现象和探索形成该运动相应的流动机理。此外,在发展该同步测控技术中,曾经成功应用于PIV技术的烟饼粒子,由于它对实验模型及其测压孔具有腐蚀作用,所以文内还将对同步PIV技术中粒子材料的选用进行研究。
1 风洞和实验模型
实验在北京航空航天大学D4低速风洞进行,开口实验段尺寸为1.5m×1.5m×2.5m。该风洞湍流度小于0.1%。
动态测压模型采用小后掠机翼加细长旋成体的翼身组合体布局,如图1所示。

图1 动态测压模型Fig.1 The model
模型机身长细比为8∶1,尖拱型头部长细比为3∶1,模型后体直径为D=0.09m;机翼前缘后掠角为30°,翼面前后缘及翼梢均削尖为45°楔角。模型表面共有11个测压截面,前体机身截面(S1~S6)均等间距布置24个测压点,机身截面(S7/S9~S11)机身上表面等间距布置11个测压点,机翼截面(S7~S9)只在上翼面布置测压点,模型共布置有222个测压点。实验来流风速选择V=15m/s,基于模型机身直径的Re=ρ VD/μ=9.0×104,前体流动处于亚临界范围[12]。当翼身组合体头部γ=0°设置人工扰动时自由摇滚实验中可得到确定的极限环振荡运动规律[6],本实验中模型头部尖端迎风对称面粘贴有直径0.2mm颗粒扰动,如图2所示。
图2 贴有扰动的头部Fig.2 The nose tip with a perturbation
2 摇滚/PIV/压力同步测控系统
摇滚/PIV/压力同步测控系统包括三部分,分别为PIV系统、动态测压系统以及强迫摇滚运动系统,如图3所示。以下分别对三个子系统进行介绍。
2.1 PIV系统
本研究中PIV设备采用Dantec公司的Flow Map DPIV系统[13],包括激光器系统、焦距85/50mm Nikon镜头、4M高感光跨帧相机、粒子发生器、帧抓取器、同步板及Flow Manager采集处理软件。实验中动态控制主机发出触发脉冲经PIV同步盒控制PIV系统与动态运动控制系统同步运行。PIV系统对流场中播撒的示踪粒子相关的数字图像信息进行采集,然后利用该DPIV系统的Flow Manager处理软件对所采集的前后两帧示踪粒子数字图像信息进行自适应相关处理,从而得到流场中速度矢量场分布图。

图3 同步测控系统示意图Fig.3 Test systemset-up of synchronous measurement and control technique
PIV实验中选用何种材料作为示踪粒子非常重要,不仅粒子质量关系到速度矢量测量精度,而且不同材料的粒子对实验设备及模型的影响作用各有差异。过去曾经选用烟饼粒子作为示踪粒子,并成功应用于PIV测量技术。然而实践表明烟饼粒子对风洞洞体和实验模型具有腐蚀作用,为了避免它对模型特别是测压孔的腐蚀作用,必须寻求新的粒子材料。为此,实验中试用了橄榄油和食用豆油两种发烟材料,通过与前期使用的烟饼粒子相比,从多方面考察不同发烟材料对PIV实验测量的适用性。图4中给出了三种材料相同风速下10mm×10mm大小的原始粒子图像以及二维速度矢量图。从图4中可以看出三者的粒子浓度基本相同,感光度均良好,处理后的速度矢量图都很均匀,表明三种材料都适用于PIV测量。然而需要指出的是烟饼产生的固体颗粒对风洞有一定污染,尤其会影响测压模型的测压管路,因而同步测控实验中不能继续使用;而食用豆油与橄榄油相比经济、方便购买,对模型及压力扫描阀没有污染,而且经济方便,因此实验中采用食用豆油作为发烟材料。雾化后的示踪粒子平均直径约为2μm~5μm。
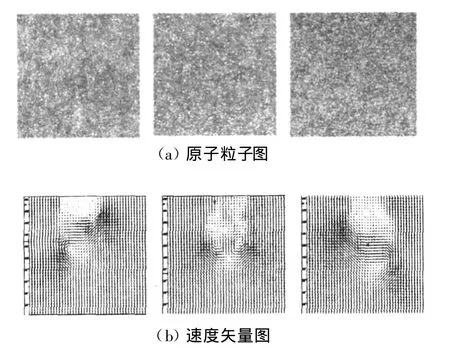
图4 三种不同发烟材料对应的原始粒子图以及速度矢量图(左:烟饼颗粒;中:豆油颗粒;右:橄榄油颗粒)Fig.4 The original particle pictures and velocity vector pictures of three kinds of smoke oil(left:smoke piece;middle:bean oil;right:olive oil)
2.2 动态测压系统
对于机翼摇滚动态测压采用Hyscan2000测压系统[14],该系统主要由五部分组成:DAQ数据采集系统、IFM2000ZOC接口模块、ZOC电子压力扫描阀、CSM2000电缆伺服模块以及SPC3000压力校准系统。该系统不仅具有高采集速率,而且具有高速的数据存贮和处理能力。实验中选用64通道量程为1psi压力传感器,采集频率设置为128Hz。采用扫描阀进行动态测压时存在测压管路频率响应问题,本课题组之前的研究已表明[15],由于所研究的机翼摇滚频率较低,采用0.5m长测压管路与压力扫描阀连接可以满足同步测控实验动态测压的频响要求。Hyscan2000测压系统通过数据信号线与动态控制主机连接,同步测控实验中接受动态控制主机发出的触发脉冲与PIV系统实现同步运行。
2.3 强迫摇滚运动系统
强迫摇滚运动系统是既能模拟和再现自由摇滚的运动历史又能配置测力、测压系统的装置[11]。该装置将高精度电机和减速器串联于模型支杆中,模型与专用过渡连接头固连,通过PID参数调节方法对伺服电机进行控制,可以实现模型精确模拟自由摇滚运动轨迹或标准正弦运动轨迹运动,同时对模型进行动态测压和PIV流场测量实验,实现对模型表面流动及空间流场的测量。控制电机具有较高的复现精度,运动位置误差基本控制在5%以内。如图5所示。关于强迫摇滚模拟技术的详细介绍参见文献[11]。
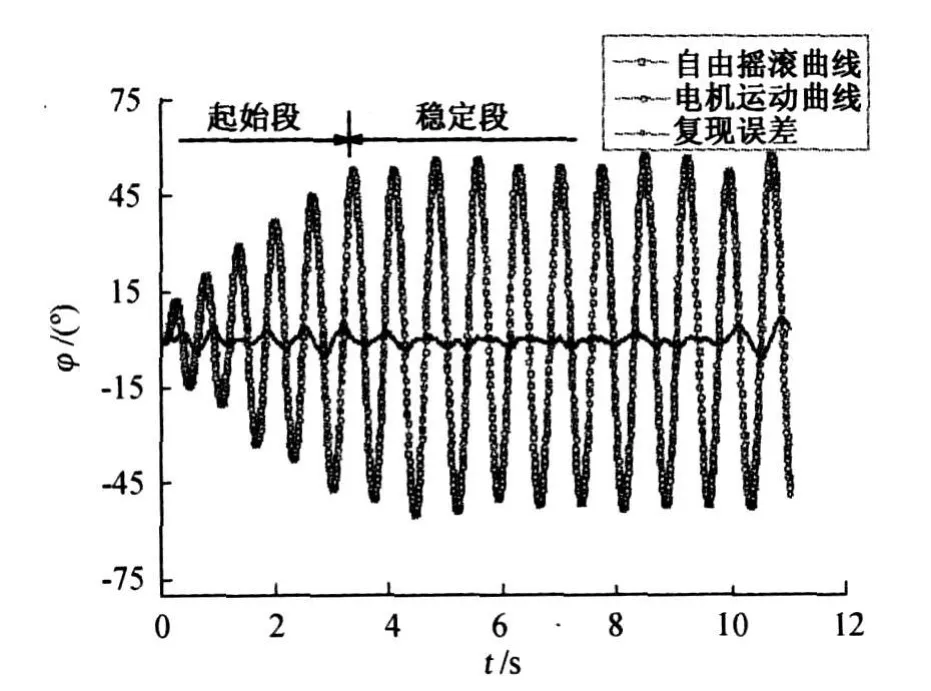
图5 强迫摇滚模拟复现曲线[11]Fig.5 Curve of forced-roll simulation[11]
3 同步测控实现方式及验证
依照同步测控实验技术的要求,强迫摇滚运动系统驱动模型按指定运动轨迹运动过程的同时进行PIV与物面压力测量。其中 Hyscan2000测压系统通过外触发信号线与强迫摇滚运动系统保持实时响应满足同步测量性能要求。研究中首先实现了同步测控技术外触发锁位工作方式,即多个运动周期内模型强迫摇滚至指定角度相位时瞬时外触发PIV系统以及动态测压系统进行数据采集,以便将不同周期相同相位多次采集的结果进行平均处理;其次运用锁位工作方式,实现强迫摇滚运动系统、PIV系统与动态测压系统同步运行,机翼摇滚流场同步测量实验结果表明该同步测控系统具有很高的时序同步精度。
3.1 锁位测量技术介绍
从翼身组合体的极限环振荡自由摇滚时间历程可以看到,模型摇滚具有稳定的周期性,因此仅需研究一个摇滚周期内流动结构和流动特性的演化规律。为尽可能减小实验结果周期性流动的不稳定因素,实验中要求同步测控系统实现锁位测量,在处理数据时将运动过程中不同周期内相同相位角下的结果进行平均作为该相位角对应的流动测量结果;另外锁位测量还可以满足在测量不同截面时锁定同一相位进行采集。实验中PIV与压力同步测量共进行15个周期的重复锁位测量,锁位方式具体为:模型运动至所需测量相位前,按照PIV系统触发延时时间20ms内模型滚转经过的角度值提前触发PIV系统处于等待状态,延时后PIV系统接收到运行触发信号开始与动态测压系统同步工作,例如图6所示:图中测量相位为9.5°正向,根据待模拟的自由摇滚时间历程曲线可知触发提前角度为7°左右即为20ms;模型极限环振荡15个周期内锁相测量对应模型实际角度的误差分析如表1所示:15次测量平均锁位角度为9.5173°,锁位角度标准差为 0.0192°,满足周期性非定常流动锁相测量的要求。
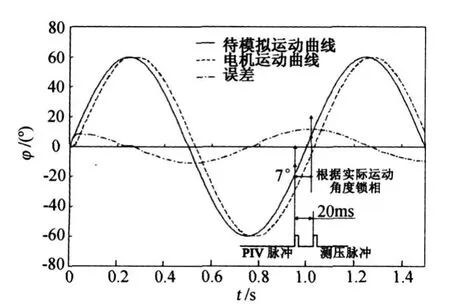
图6 锁位方式Fig.6 The angle-lockingmode

表1 锁位测量角度误差分析Table1 The error analysis of the angle-locking
3.2 强迫摇滚运动系统、PIV系统与动态压力测量同步技术及验证
强迫摇滚运动系统、PIV系统与动态测压同步运行是该同步测控技术的基础,只有实现三者完全同步运行,才可将流动测量数据与运动测量数据一一对应,通过将运动测量结果与PIV与压力动态测量结果相结合对相应的流动特性进行详细分析。系统中强迫摇滚运动系统利用控制电机驱动模型按照指定角位移运动轨迹进行运动,同时发出按角度位移序列设定一组指令脉冲触发PIV与动态测压系统同一瞬时同步运行。值得注意的是由于PIV系统设计要求,外触发PIV系统的脉冲信号需提前20ms(Δtdelay)发出,20ms后PIV系统开始运行,而此时动态测压系统也接收触发脉冲同步响应开始采集。图7介绍了同步测控系统的同步工作原理。
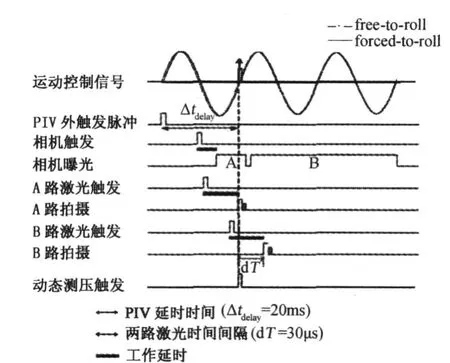
图7 同步测控工作原理图Fig.7 The working principle of synchronous measurement and control technique
同步测控实际操作流程如下:当动态控制主机启动强迫摇滚运动程序后,模型开始滚转运动,此时伺服电机编码器记录模型触发时刻的角度序列;当接近所要拍摄角度相位时采用前文介绍的锁位方式c提前20ms外触发PIV系统;20ms延时后模型运动至该角度相位,此刻PIV与动态测压系统同一瞬时响应同步运行。实验中通过比对PIV与动态测压同步采集时刻模型对应滚转角位置是否一致来验证两系统测量的同步时序精度。Hyscan2000系统为实时响应,电机编码器记录模型滚转角度序列当作动态测压响应角度序列;PIV测量的运动响应角度则从PIV流场图片中实际量取,量取精度为0.1°左右,两组角度序列如表2所示。可以看到两组角度间的误差控制在0.1°左右,相对误差比在1%以内。因此可以认为该同步测控技术具有很好的同步响应特性,满足同步测量的实验要求。图8为模型进行自由摇滚过程中正向滚转至γ=7°时的同步测控测量结果,可以看到同步测得的两类数据都呈现出前体对称涡状态,同步测控技术在该状态下实现完全同步。
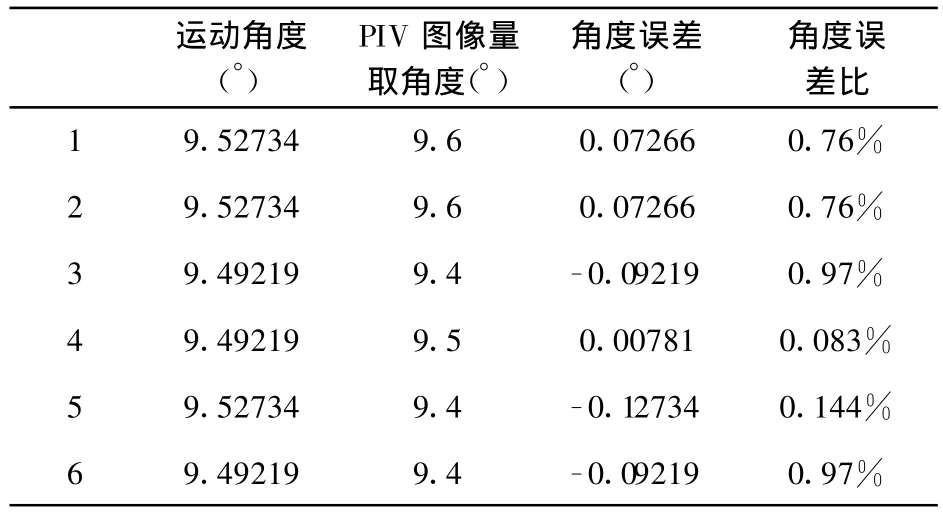
表2 PIV与动态壁面压力测量同步角度比较Table2 A comparison of synchronous angle for PIV and dynamic surface pressure measurement
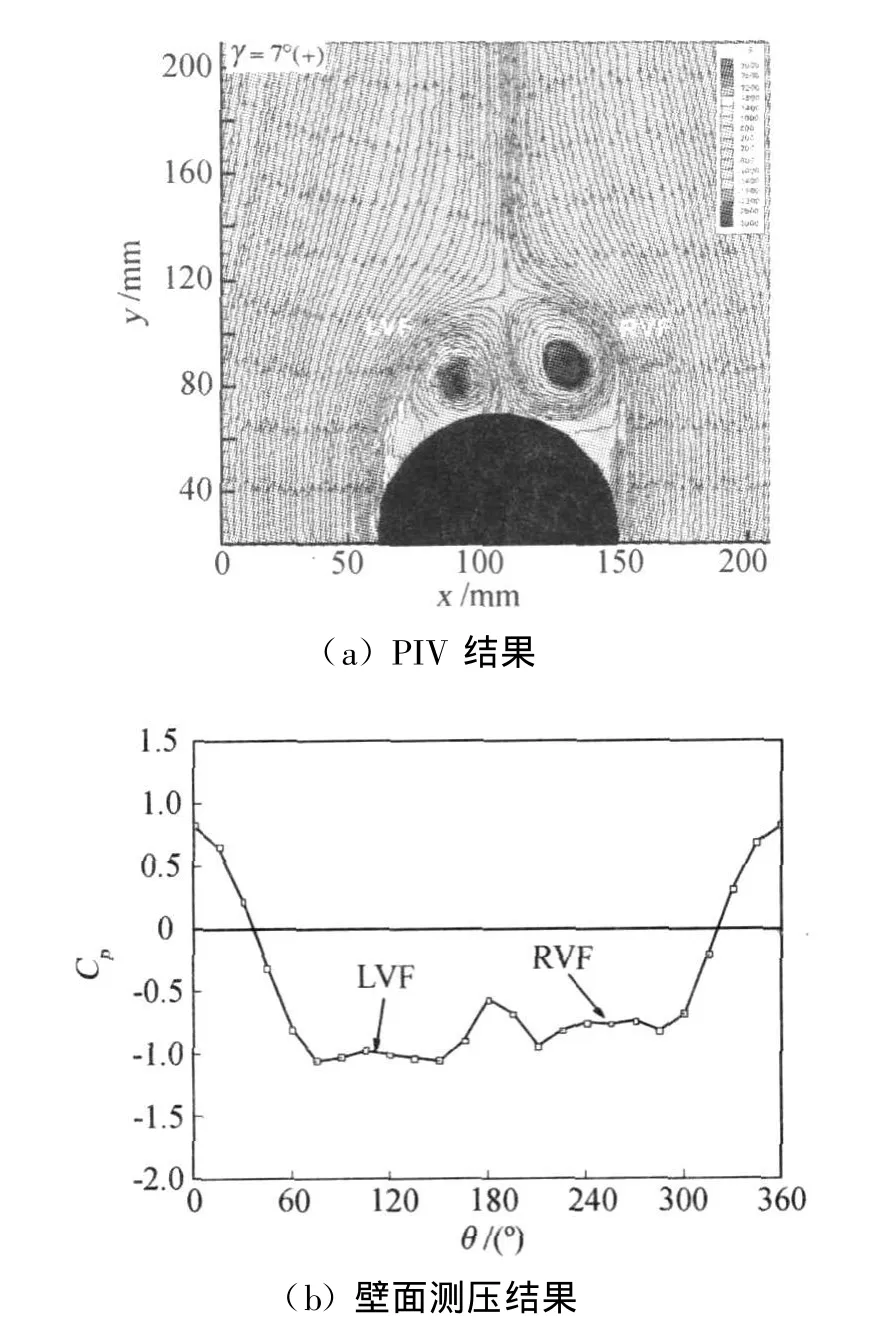
图8 PIV与动态测压同步测量正向滚转γ=7°实验结果(x/D=2.5)Fig.8 The results of combined PIV and dynamic pressure measurement at γ=7°(x/D=2.5)
4 机翼摇滚流场同步测量结果讨论
通过频谱分析发现,机翼摇滚可以近似服从正弦运动规律,本研究侧重于同步测控技术的应用与开发,因而用正弦运动过程中前体涡流动演化特性研究来验证同步测控技术,与此同时来研究和探索摇滚运动的流动机理。
邓学蓥等[17]对前体非对称涡确定性研究结果表明,在头部设置人工扰动后模型前体的左右涡型正则态结构以及对称涡型与头部扰动周向位置存在确定的对应关系,如图9所示。本文在翼身组合体模型强迫摇滚模拟正弦1.0Hz、振幅60°的摇滚运动过程中进行了PIV与动态物面压力同步测控实验,实验风速V=15m/s,模型迎角 α=52.5°,扰动位于模型头部γ=0°对称位,也就是模型自由摇滚时出现等幅极限环型摇滚状态时对应的扰动位。

图9 x/D=2.5截面侧向力随扰动周向角变化曲线[17]Fig.9 Curve of side force with perturbation azimuth angle at x/D=2.5[17]
图10为动态正弦 f=1.0Hz摇滚过程中前体x/D=2.5截面侧向力分布曲线。与静态实验结果相比可知,前体涡会在平衡位置0°附近出现左右涡型相互切换,同时侧向力会出现迟滞变化现象。
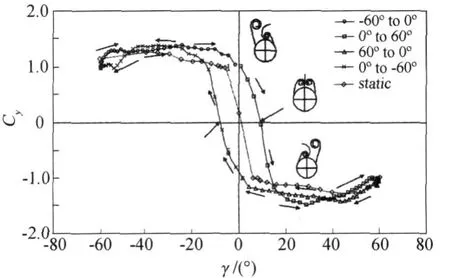
图10 动态摇滚过程中x/D=2.5侧向力随滚转角变化曲线(f=1Hz)Fig.10 Curve of side force with roll angle at x/D=2.5 in process of forced-rolling(f=1Hz)
通过机翼摇滚/PIV/压力同步测量实验结果对机翼摇滚过程中前体涡特性及演化规律进行分析,如图11所示。图中所示为模型由平衡位置正向摇滚至正向最大位移处锁相测量的PIV空间流动图像。锁位角度包括正向 γ=0°、6°、9°、12°、20°。模型动态摇滚经过γ=0°时由于前体涡流动演化滞后于模型滚转运动,头部扰动不会马上响应,相应的非对称背涡仍保持之前的右涡型状态(文中所指的左右涡型流场是根据前体涡与物面的位置关系定义的:如非对称二涡中左涡为低位涡,右涡为高位涡,该涡型称之为左涡型,同理可知右涡型定义),如图11(a);模型继续滚转背涡涡型的非对称程度逐渐减弱,右涡降低,左涡抬高,直至滚转到γ=9°时前体涡呈现对称态,如图11(b)和图11(c);模型继续滚转由于头部扰动效应完全主控,前体背涡涡型反向,非对称程度逐渐增大,直至γ=20°时前体涡演化为稳态左涡型,之后滚转到正向最大位移过程中前体涡均保持稳态左涡型,如图11(d)和图11(e)。以上为模型正向滚转至最大位移时经历的前体涡迟滞变化过程。而模型从γ=0°负向滚转至最大负位移处也将经历类似的迟滞演化过程;而最大正位移至γ=0°以及最大负位移至γ=0°过程中前体非对称涡都与其头部扰动响应相关性保持一致,模型滚转位于正向滚转角时前体涡为左涡型,负向滚转角时为右涡型。
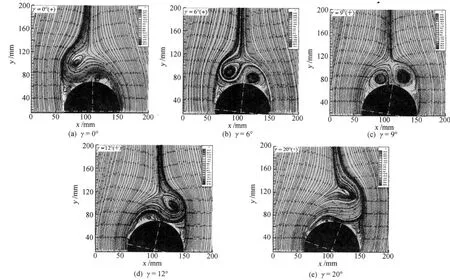
图11 模型x/D=2.5处机翼摇滚/PIV/压力同步测控实验结果(PIV部分)Fig.11 The results of synchronous measurement and control test of wing rock/PIV/pressure on x/D=2.5(PIV)
图12为同步测控测量实验的压力测量结果。从测压结果也可以看出:在亚临界区,非对称涡绕流两侧都呈现典型的层流分离形式(L/L)[12],低涡侧吸力大于高涡侧,将会诱导出相应的侧向力。模型正向γ=0°时压力不对称分布,左侧吸力小,右侧吸力大,为典型的非对称右涡压力分布形态。两涡间的相互挤压作用使得模型背风面诱导出一定的吸力峰值。继续滚转压力分布非对称程度减弱直至出现完全对称分布,背风侧压力峰值出现;滚转角继续增大,压力分布呈现出左侧吸力大右侧吸力小,最后变为与γ=0°时左右对称的压力分布形态。因此,机翼摇滚过程中涡型随滚转角变化规律与PIV流动图像分析得到前体涡变化规律完全一致。
上述实验结果表明极限环摇滚过程中前体头部微扰动的周相位置与非对称涡的性态之间存在紧密的相关性。同步测控结果中PIV流场图片与动态测压结果同步匹配较好,能够反应出动态摇滚过程中前体非对称涡形态及演化规律(如图13)。因此,该同步测控技术为深入分析翼身组合体机翼摇滚机理提供了有效的研究手段。
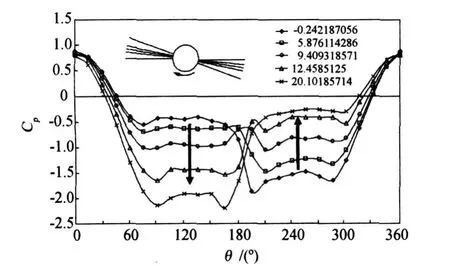
图12 模型x/D=2.5处PIV与动态物面压力同步测控实验结果(动态测压部分)Fig.12 The results of synchronous measurement and control test of wing rock/PIV/pressure on x/D=2.5(dynamic pressure)
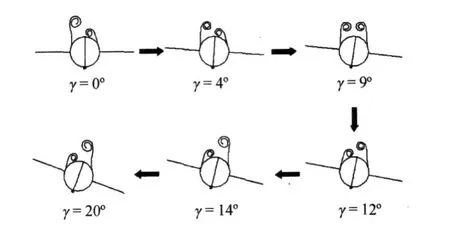
图13 机翼摇滚过程中前体x/D=2.5非对称涡变换示意图(γ=0°至 γ=20°)Fig.13 The sketch of the asymmetric vortox switching at x/D=2.5 during the wing rock(γ=0°toγ=20°)
4 结 论
本文介绍了在北航D4风洞为研究机翼摇滚中流动演化机理开发的机翼摇滚/PIV/物面压力分布同步测控技术,并开展了前体涡诱导机翼摇滚运动现象以及形成该运动相应的流动机理的研究。实验结果表明同步测控技术能够实现精确同步测量功能,为研究并揭示前体涡诱导机翼摇滚过程中模型物面及空间流动演化规律提供了重要的技术手段;通过对正弦f=1.0Hz运动摇滚过程中模型前体 x/D=2.5截面压力分布及空间流场的初步研究,发现机翼摇滚过程中前体头部微扰动的周相位置与非对称涡的性态之间存在紧密的相关性。
[1]JOSEPH KATZ.Wing/Vortex interactions and wing rock[J].Progress in Aerospace Sciences,1999,35:727-750.
[2]NELSON R C,PELLETIER A.The unsteady aerodynamics of slender wings and aircraft undergoing large amplitude maneuvers[J].Progress in Aerospace Sciences,2003,39:185-248.
[3]ERICSSON L E.Wing rock generated by forebody vortices[R].AIAA Paper 87-0268.
[4]QUAST T,NELSON R C,ISHER D F.A study of high alpha dynamics and flow visualization for a 2.5%model of the f-18 harv undergoing wing rock[R].AIAA Paper 91-3267-CP.
[5]ROSS A J,NGUYEN L T.Some observations regarding wing-rock oscillations at high angels of attack[R].AIAA 88-4371.
[6]马宝峰.前体涡诱导机翼摇滚的实验研究[R].北京航空航天大学博士后研究工作报告,2007.
[7]NG T T,MALCOLM G N,LEWIS L C.Flow visualization study of delta wings in wing-rock motion[R].AIAA Paper 89-2187.
[8]MORRIS S L,WARD D T.A video-based experimental investigation of wing rock[R].AIAA Paper 89-3349-CP.
[9]唐敏中.滚摆非定常流场的定量流动显示[J].流体力学实验与测量,2000,14(2):61-66.
[10]ARENA A J.An experimental and computational investigation of slender wing undergoing wing rock[R].University of Notre Dame,1992.
[11]王兵,黄存栋,马宝峰,邓学蓥.精确复现机翼摇滚运动的控制技术[J].实验流体力学,2009,3(1):79-104.
[12]LAMONT P J.Pressures around an inclined ogive cylinder with laminar,transitional,or turbulent separation[J].AIAA J.,1982,20(10):1492-1499.
[13]DANTEC COM PANY.Flow manager software and introduction to PIV instrumentation[M].2000.
[14]SCANIVALVE CORP.Hyscan Pressure system[M].2000.
[15]曹博超.风洞动态测压技术及其在机翼摇滚运动研究中的应用[D].[硕士学位论文].北京航空航天大学,2008.
[16]恽起麟.风洞实验[M].北京:国防工业出版,2000.
[17]DENG Xue-ying,WANG Gang,et al.A physical model of asymmetric vortices flow structure in regular state over slender body at high angle of attack[J].Science in China(Series E),2003,46(6):561-573.
猜你喜欢
健康护理(2022年5期)2022-05-26 16:27:58
天津医科大学学报(2021年1期)2021-12-05 11:11:05
中学生数理化·八年级物理人教版(2021年4期)2021-07-22 03:15:18
北京航空航天大学学报(2020年10期)2020-11-14 09:26:06
中国测试(2018年10期)2018-11-17 01:58:50
中华胃食管反流病电子杂志(2016年2期)2016-10-10 01:31:22
现代检验医学杂志(2016年5期)2016-08-20 03:17:08
航空学报(2015年4期)2015-05-07 06:43:28
振动、测试与诊断(2014年5期)2014-03-01 01:14:27
茶叶通讯(2014年2期)2014-02-27 07:55:40
