
基于变步长LMS算法的线性调频引信噪声抑制
2010-03-24 02:41:16路翠华李国林
海军航空大学学报 2010年5期
路翠华,李国林,熊 波
(海军航空工程学院 a.七系;b.兵器科学与技术系,山东 烟台 264001)
0 引言
调频引信根据回波信号与发射信号的频差来提取目标信息,但是压制性干扰的存在可以阻碍引信对目标信息的正常检测。压制性干扰的最佳干扰波形就是随机性最强的波形,在平均功率限定的条件下,正态分布噪声的随机性最大,为最佳压制性干扰波形。自适应滤波技术发展至今,已成为干扰抑制[1-6]、回波消除[7]、泄露抵消[8]等方面重要的技术手段。本文将自适应滤波技术应用到线性调频引信中,用来对压制性高斯白噪声进行抑制。
自适应滤波算法的选择影响滤波器的收敛速度和精度。LMS算法是一种用瞬时值估计梯度矢量的自适应算法,具有算法简单、计算量少的优点,因而得到了广泛的应用,但其存在收敛速度、跟踪速度和收敛精度的矛盾。为了解决这一矛盾,人们提出了变步长自适应滤波算法。文献[9]提出其步长因子可随迭代次数n的增加而逐渐减少的自适应滤波算法;文献[10]提出一种时间平均估值梯度的自适应滤波算法;文献[11]提出一种步长因子µ 正比于误差信号e (n)大小的自适应滤波算法;文献[12]提出一种步长因子µ 与e(n)和 x (n)的互相关函数的估值成正比的自适应滤波算法;文献[13]给出了Sigmoid函数变步长LMS算法;文献[14]也提出了一种变步长自适应滤波算法。本文采用文献[14]提出的变步长自适应滤波算法,该算法满足变步长自适应滤波算法的步长调整原则[15],并克服了Sigmoid 函数变步长LMS算法在自适应稳态阶段仍有较大步长变化的不足。
1 线性调频引信的工作原理
线性调频引信为锯齿波调制,发射波的频率按锯齿波规律变化。其发射、反射和差频信号变化规律如图1所示。

图1 锯齿波调制时间—频率曲线
图1a)为发射与回波信号的时间—频率曲线。实线为发射信号频率 ft,虚线为回波信号频率 fr,f0为载波频率,∆F为最大频偏,Tm为调制信号周期。图1b)为混频器输出端差频信号的时间—频率曲线,其中,Fb表示差频频率,为nT ~nT +τ 期间的差频。图1b)中虚线为考虑多普勒效应影响时的情况。图1c)为混频器输出端差频信号电压Ui与时间的曲线。由图1可求得发射信号频率 ft与回波信号频率 fr的表达式为:
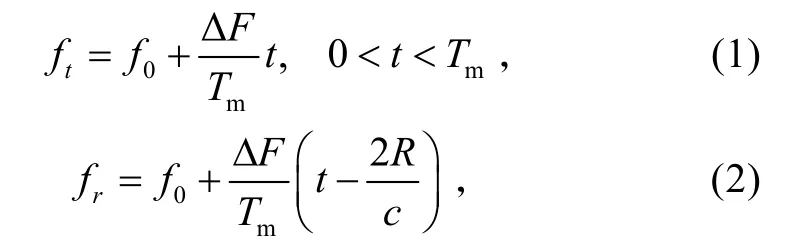
式中:c为电磁波的传播速度。
差频bF为:
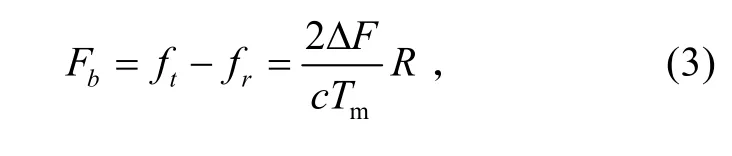
即
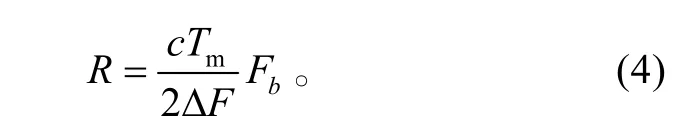
由式(3)、(4)看出,当调制参数mT 和 ∆F 一定时,差频bF 与距离R 成正比。
若存在压制性干扰,干扰信号为正态分布的噪声。通过线性调频引信通带的压制性噪声太强时,引信将无法正确测得差频信号频率bF,从而无法正确得到导弹与目标的距离R,此时需要对引信通带内的噪声进行抑制。
2 噪声抑制原理
线性调频信号中含有高斯白噪声时,调频信号是可预测的,但高斯白噪声的可预测性比较差,利用两者可预测性的差异进行噪声抑制。噪声抑制原理如图2所示。
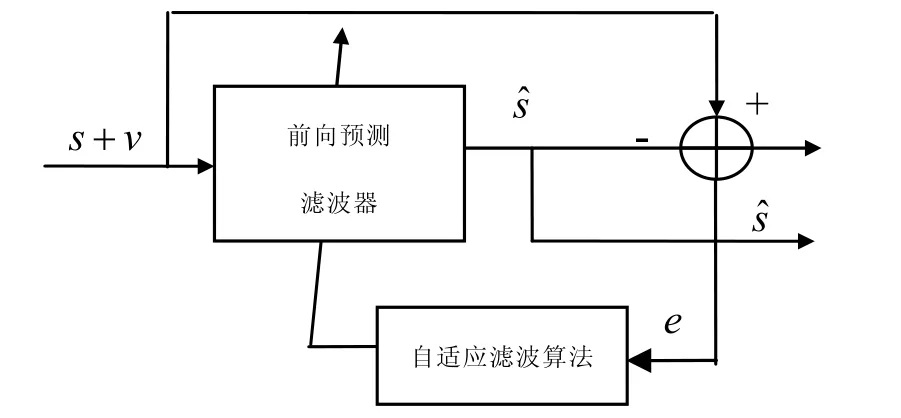
图2 噪声抑制原理
设含有噪声的信号为x,x=s+v,其中s为线性调频信号,v为高斯白噪声。利用前向预测滤波器可得到信号s的前向预测信号。误差e=s +v−,根据误差e 调整前向预测滤波器的权值,使→s,从而使e → v,达到噪声抑制的目的。
因为引信工作时间比较短,所以要选计算量少、收敛速度快的自适应滤波算法。本文采用文献[14]提出的变步长自适应滤波算法。该算法初始收敛阶段较大,对应的µ (n)较大,算法收敛速度较快;当算法进入稳态时,达到最小,此时 µ (n)也达到最小,由此得到最佳Wiener 解。算法如下:
式中:d (n)为期望响应;X (n)为输入信号矢量;W (n)为权值;µ (n)为步长因子;参数α>0控制函数的形状;参数β>0控制函数的取值范围。
3 噪声抑制性能仿真与分析

对式(8)两边取数学期望,则
为深入贯彻中央全面从严治党要求和乡村振兴战略,培养优秀基层党建和社会管理人才,提高基层经济发展管理质量,11月10日-16日,十二师二二二团首批28名由连队、社区“两委”和致富带头人、合作社社长组成的考察团赴对口援疆省市,山西长治市开展了为期一周的观摩学习。
实际上很难达到自适应滤波的理想情况,下面通过仿真来分析线性调频引信采用变步长LMS算法进行噪声抑制的性能。取变步长LMS算法中的参数α、β为:α=1 000,β=0.001 54(滤波参数α、β 选取依据经验值)。当SNB=0 dB时,线性调频引信采用变步长LMS算法进行噪声抑制的效果如图3所示。
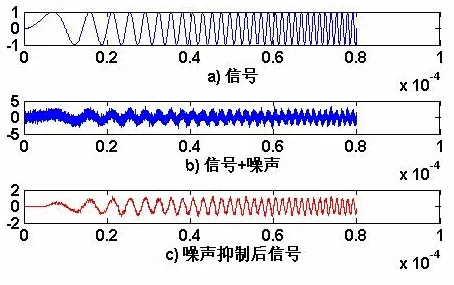
图3 SNB=0 dB时噪声抑制效果
当SNB=−5 dB时,线性调频引信采用变步长LMS算法进行噪声抑制的效果如图4所示。
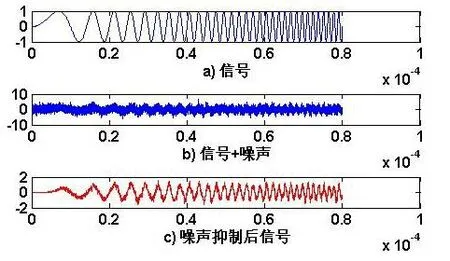
图4 SNB=−5 dB时噪声抑制效果
图3a)和图4a)为原始信号,图3b)和图4b)为含有噪声的信号,图3c)和图4c)为噪声抑制后的输出信号。由图3c)可以看出,SNB=0 dB时,线性调频引信采用变步长LFM算法很好地抑制了线性调频信号中的噪声。由图4c)可以看出,SNB=−5 dB时,噪声抑制后的信号虽然仍旧含有部分噪声,但信噪比得到了明显的改善。
当SNB=−10 dB时,线性调频引信采用变步长LMS算法进行噪声抑制的效果如图5所示。
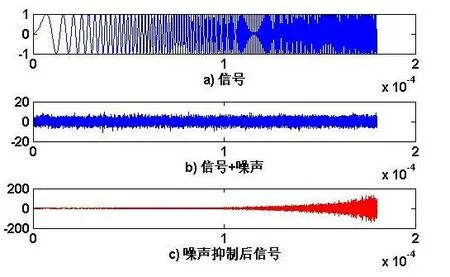
图5 SNB=−10 dB时噪声抑制效果
由图5c)可以看出,当SNR=−10 dB时,变步长LMS算法的参数为α=1 000,β=0.001 54时,算法不收敛,达不到很好的噪声抑制效果。此时,需要调整变步长LFM算法的参数α、β。

表1 噪声抑制前后信噪比及改善量
由表1可以看出,线性调频引信利用变步长LMS算法进行噪声抑制明显改善了信噪比,并且在算法收敛的条件下,信噪比越小,信噪比的改善量越大。
4 结论
将自适应滤波技术应用到线性调频引信中,用来对压制性噪声进行抑制。根据线性调频信号和噪声可预测性的差异,利用前向预测滤波器对噪声进行抑制,分析了噪声抑制原理,自适应滤波算法采用文献[14]提出的变步长LMS 自适应滤波算法。取变步长LMS算法中参数 α=1 000,β=0.001 54,通过仿真分析可以发现,在SNB=−5dB时仍然可以达到很好的噪声抑制效果,在算法收敛的条件下,信噪比越小,信噪比的改善量越大。
[1]谢春健.基于自适应滤波的扩频通信系统抗干扰研究[D].西安:西北工业大学,2005.
[2]胡军锋.宽带通信中的窄带干扰抑制技术研究[D].西安:西安电子科技大学,2004.
[3]周红彬.直接序列扩频通信中窄带干扰的识别和抵消[D].西安:西安电子科技大学,2003.
[4]李红霞.直接序列扩频信号中多窄带干扰的自适应抑制技术[D].成都:电子科技大学,2001.
[5]SAMI AROMAA,PERTTI HENTTU,MARKKU JUNTTI.Transform-selective interference suppression algorithm for spread-spectrum communications[J].IEEE SIGNAL PROCESSING LETTERS,2005,12(1):49-51.
[6]HAOSHEN,ANTONIA PAPANDREOU-SUPPAPPOLA.Wideband time-varying interference suppression using matched signal transforms[J].IEEE Trans.Signal Process.,2005,53(7):2607-2612.
[7]林耀荣.自适应滤波理论及其在回波消除中的应用研究[D].广州:华南理工大学,1999.
[8]韩俊杰,党怀锁,焦光龙.FTLMS算法在引信泄漏信号对消器设计中的应用[J].弹箭与制导学报,2002,22(4):66-68.
[9]GITLIN R D,WEINSTEIN S D.On the design of gradient algorithms for digitally implemented adaptie filters[J].IEEE Trans.on CT,1973,20(2):125-136.
[10]GITLIN R D,WEINSTEIN S D.The effects of large interference on the tracking capability of digitally implemented echo cancellers[J].IEEE Trans.on COM,1978,26(6):833-839.
[11]YASUKAWA H,SHIMADA S,FURUKRAWA I.Acoustic echo canceller with high speech quality[C]//ICASSP,1987:2125-2128.
[12]叶华,吴伯修.变步长自适应滤波算法的研究[J].电子学报,1990,18(4):63-69.
[13]吴光弼,祝琳瑜.一种变步长LMS 自适应滤波算法[J].电子学报,1994,22(1):55-60.
[14]高鹰,谢胜利.一种变步长LMS 自适应滤波算法及分析[J].电子学报,2001,29(8):1094-1097.
[15]谭景繁,欧阳景正.一种新的变步长自适应滤波算法[J].数据采集与处理,1997,12(3):171-174.
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
能源工程(2021年5期)2021-11-20 05:50:42
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
西南石油大学学报(自然科学版)(2015年5期)2015-04-16 05:12:24
河北科技大学学报(2015年5期)2015-03-11 16:16:37
海军航空大学学报(2015年4期)2015-02-27 13:45:51
