
基于ADAMS的滚柱轧路机虚拟样机设计与动态仿真
2010-03-17 12:25华中农业大学工学院李旭荣
湖北农机化 2010年3期
华中农业大学工学院 李旭荣 黄 丹
现代社会建设离不开道路建设。“要想富,先开路”的口号一直被人们倡导,可见路是中国人民通向富裕、中国社会通向繁荣、中华民族通向复兴的桥梁。修路就离不开轧路机。这里设计的轧路机是滚柱式,后四轮驱动整机运行,前轮导向作用,行驶时速度缓慢,轧力大,其中前面的滚柱为主要接触部件,质量大从而实现有效压紧路面,属大型机械,可应用于土木工程建设。Admas可以对已经设计好的轧路机进行虚拟样机建模,并分析该轧路机的运动特性等,从而验证该设计是否正确。
1 轧路机工作原理图

图1 工作原理图
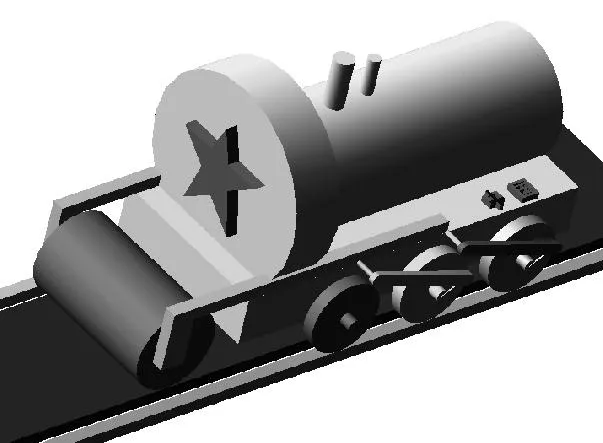
图2 轧路机虚拟样机模型
轧路机工作原理是驱动轮1、驱动轮2分别由电机驱动做旋转运动,通过连杆1、连杆2传动到推杆,推杆做平移运动,从而实现滚柱的平动;同时车身与推杆相对移动。车身相对大地也做平移运动。
2 轧路机虚拟样机建模
2.1 轧路机建模
该轧路机整个虚拟样机由车身、滚筒、车轮、连动部分和地板5部分组成,分别各个建模,步骤如下:
(1)启动Adams/view,在欢迎对话中选择新建模型,模型名字输入框中输入yaluji。
(2)设置环境:单击菜单【settings】-[working gird],在工作栅格设置对话框中,将工作栅格的X和Y尺寸设置为10m,间距【spacing】为0.125m。调整视图,点击View菜单,选择CoordinatewindowF4,打开坐标窗口。
(6)连续点击布尔运算,车身合为一体。
(7)滚筒:改变环境,单击菜单【settings】-[working gird],在工作栅格设置对话框中,将方向setorientation设置为 globalXZ。点击图标,选 newpart,分别设置length为2.5m,radius为0.8m,选择相应点进行定位。
最后建立的模型如图2所示。
2.2 添加约束和驱动
分别将建立的模型之间添加上正确的约束和驱动。车身与车轮之间用旋转副连;车身相对于大地为移动,用移动副连接;底板与轨道与大地固定,车身与修饰,用固定副连;导向车轮要求与底板接触,采用接触副。
3 动态仿真与运动分析
为了验证所建模型的正确性,我们要分析它的运动规律。
3.1 滚筒质心沿X轴运动速度见图3。滚筒质心绕Z轴旋转的角速度见图4。
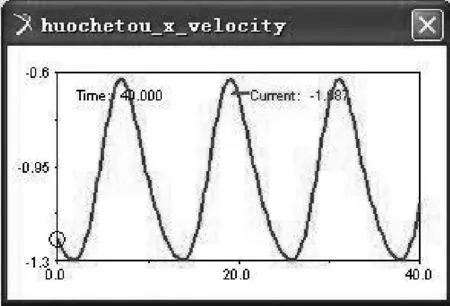
图3 滚筒质心沿x方向运动速度

图4 滚筒质心绕Z轴旋转的角速度
从这两个图可以看出,说明滚筒的运动是沿地面直线运动的同时自身围着质心旋转运动,运动符合设计要求。
3.2 中间连接在车身上轮子的轮心沿X轴速度曲线见图5
由图5知在运动过程中火车的运动速度是恒定的,它的大小与所加驱动有关。同时中间轮心的运动是随着车身的运动而拖动的,所以保持恒定速度。
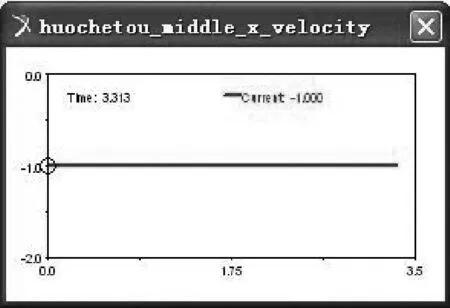
图5 连接在车身上轮子的轮心沿x轴速度
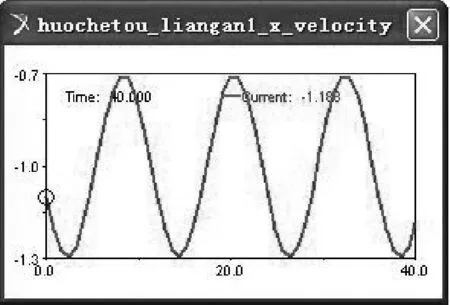
图6 轮子与连杆接触点沿x轴速度
3.3 轮子与连杆接触点沿x轴速度见图6
图6说明接触点的运动是周期性的,运动平稳,符合设计前的构想。
3.4 联动构件位置分析
推杆的位置由轮子的转动和连杆的传动实现,从而推动滚柱前行。图7所示为刚启动时联动杆件的位置,行驶到半个周期时连杆位置如图8所示。整个运动中没有干涉现象出现。充分说明了该设计的正确性和可行性。
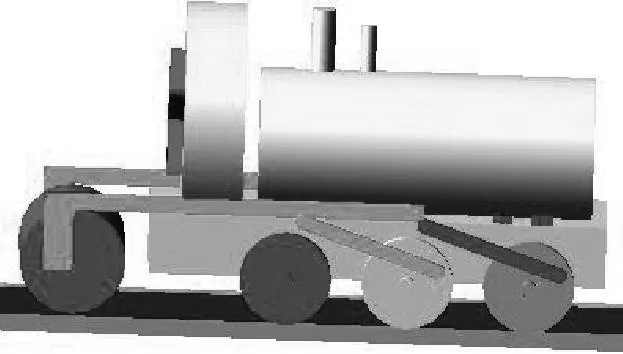
图7

图8
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
制造业自动化(2022年1期)2022-02-11
小学科学(学生版)(2021年7期)2021-07-28
机械制造与自动化(2020年6期)2021-01-04
装备制造技术(2020年4期)2020-12-25
幼儿园(2020年22期)2020-03-29
中学语文(2019年31期)2019-12-05
制造技术与机床(2019年1期)2019-01-14
时代农机(2016年6期)2016-12-01
环境科技(2015年4期)2015-11-08

- 湖北农机化的其它文章
- 对6063铝合金的应用研究