
基于 Kriging算法的手术导航三维形变技术
2010-03-16 09:21王田苗王君臣
北京航空航天大学学报 2010年5期
胡 岩 王田苗 王君臣 胡 磊
(北京航空航天大学 机械工程及自动化学院,北京 100191)
基于 Kriging算法的手术导航三维形变技术
胡 岩 王田苗 王君臣 胡 磊
(北京航空航天大学 机械工程及自动化学院,北京 100191)
针对计算机辅助手术三维导航技术中无法利用术前 CT重建模型进行病人个体化手术的问题,提出一种基于克里金(Kriging)算法的三维骨骼形变(bone morphing)技术.利用术中采集和医学图像模型的两片点云进行配准,在 CT重建模型上选取 4个合适的控制点,通过求解 Kriging算法建立的方程组,获得 CT重建模型上所有点相对于实际病例变形后的位置,实现医学图像模型向个体化的变形.最后,以人体股骨 CT模型和塑料模型为对象进行了形变的精度分析和关节手术导航评估实验.结果表明:这种形变方法简单可靠,可以用于前交叉韧带(ACL,Anterior Cruciate Ligament)重建手术的导航评估.
膝关节;手术导航;克里金;配准;骨骼形变
计算机辅助外科手术三维导航技术目的在于实现外科手术过程可视化,减少手术创伤和辐射,同时提高手术精度[1].利用机器人和导航技术,将医学图像和手术过程中的实际解剖组织关联起来,提供给医生一个可视化、交互式、精确的手术环境.临床上通过常用的医学图像重建出手术对象(骨骼、软组织、血管等)的三维形状[2].医学图像形变技术,就是将 CT重建模型和实际病例对象联系起来,实现针对个体病例的变形,这样才能将实际病例的操作映射到 CT模型,引导医生完成手术.因此形变技术是手术导航技术的关键,形变的精度直接影响到手术的成败.
医学图像的形变分为二维和三维图像的形变,前者包括多边形形状渐变和图像自然渐变,后者包括刚体和软组织的形变.本文只针对三维刚体的形变.图像变形技术是研究图像中点到点的空间映射和变换问题,该技术可以应用于众多手术适应症(全膝关节置换、前交叉韧带重建)的无图像导航.文献[3-4]提出了基于模型的技术,通过骨骼形变(bone morphing)技术获得的骨骼表面点推理出病人个体化的三维表面,利用基于模型的统计主元分析法(PCA,Principal Component Analysis)实现通用模型到术中数据的形变和姿态的优化.文献[5]运用了最近点迭代(ICP,Iterative Closed Point)法进行形变和姿态的优化.文献[6-7]利用 PCA获得的模型,根据病人的身高、体重和年龄,推理出了所有可能的模型.法国Praxim公司在文献[5]研究的基础上推出了相应的产品 Surgetics系统[8-9].国外的方法一般都需要进行统计学分析,算法的实现周期比较长.而本文提出的方法简单实用,无需对病体进行统计分析.该技术可以应用到骨科的多个领域,应用时无需任何 X片和(或)CT等影像,避免 X射线辐射,减少费用支出,并且可以针对个体化的病例进行手术,将会提高手术精度.
1 三维模型形变的数学描述
骨骼形变技术是将给定的原数字化的几何模型 S变换到目标数字几何模型 T,T是由 CT重建的三维模型,S是术中在光学定位仪下采集的数字化病例.所谓 S到T的配准,就是找到一种变形函数,使得 S中的点变换到 T的相应元素上:

用一种通用的流程来描述所有的医学模型变形问题:
1)分别抽取 S和 T中的特征元素集合,记为FS和 FT,(ps)j和(pt)j分别为特征集合中对应点的元素;
2)定义目标函数:

式中,D为广义距离函数;N对应变换点的数量;a和 b为待求参数.
3)加入边界条件并使用优化算法求解目标函数的全局极小点,得到参数 a和 b.
在手术三维导航中,一般需要将术前 CT/MRI三维重建模型与手术空间中采集的数字化特征点进行对应变形.但是,变形前还必须进行配准,因此这里的 S和T都是笛卡尔坐标系,而广义距离就是三维坐标点之间的欧氏距离.
2 基于 Kriging算法的模型形变
Kriging算法在揭示空间数据非均匀、各向异性分布规律方面具有优势,因而用于空间散乱点数据的插值.在膝关节的三维模型中,设第 j个控制点变形前后的坐标为

(Ps)j即手术中测的坐标值.建立方程组

式中

其中 c为常数.

式(2)右边可以看作仿射变换和弹性变形的组合,弹性变形部分需要边界条件:
因此,参数 a和 b可通过以下方程组解:

为保证式(2)有唯一解,控制点个数应不少于 4,采用股骨的生理特征点作为控制点.手术中,在股骨髁上取 4个股骨表面生理标志点,如图1所示.

图1 图像坐标系与股骨的生理标志点
由于这 4个点的实际位置均由医生的经验确定,选取时要尽量对应,与模型点的对应关系必然存在误差.本文采用了文献[10]中的改进方法:

式中,I是单位矩阵;λ是归一化参数,调节了仿射变换和弹性变形的权重,λ越大,弹性变形所占的比重越小.在 z方向上,参数求解方程组可以写成如下的矩阵形式:

求出参数 a和 b后,再将它们代回到式(9),设 M为模型上点的总个数,任意点变形后的 z坐标都可以式(9)表示,x和 y坐标可以用同样的方法求解.
3 基于表面特征点的形变方法
手术中需要抽取图像和实际病例的对应点进行配准,而后通过选取图像上的特征点,结合上节的算法就可以完成变形,变形过程如图 2所示.

图2 变形过程示意图
3.1 数字化 CT模型重建
术前 CT图像是具有几何坐标的医学图像格式,是对连续空间进行采样得到的三维离散灰度场.利用 Marchingcubes算法[11]重建出关节的三维模型,它是面绘制模型,其几何描述是基于扫描CT数据时定义的坐标系.采用可视化工具包(VTK,Visualization Toolkit)对三维模型进行交互式操作,例如模型分割、三角网格优化、光线投射拾取单个表面点、大面积拾取表面点等.医学图像上的特征点云可以通过先将图像数据重建成面绘制模型,然后利用光线投射法交互式地拾取重建模型上特征区域表面上的三维点集,称其为点云T,如图 3a所示.这一过程称为数字化图像空间特征曲面.

图3 特征点云
3.2 数字化个体模型获取
术中采用加拿大 NDI公司的光学定位仪 Polaris Spectrum,标称定位精度小于 0.25mm.在手术对象上安装可被光学定位仪识别的 Marker,它是术中实际空间坐标系.利用探针在手术对象(股骨髁和胫骨平台)表面划动,由定位仪实时记录探针末端点在 Marker坐标系下的坐标,称其为点云 S,如图 3b所示.这一过程称为数字化实际空间特征曲面.
3.3 三维配准及形变
运用 ICP算法将 CT重建模型和术中采集病例信息进行三维配准.需要注意的是特征区域不必要连续,每片点云都可以是对空间中若干个不同区域数字化的结果.然后,运用第 2节的算法对CT模型进行变形.三维形变的流程如图 4所示.

图4 手术三维导航的变形流程
4 形变精度及导航应用实验
4.1 骨骼形变的精度
本文采用自主研发的光电导航系统为平台进行仿真评估实验,以塑料关节模型骨为实验对象,如图 5所示.实验前对志愿者下肢关节进行 CT扫描,层间距为 0.5 mm,x和 y方向间距为0.586mm.实验中使用灰度值 300对关节 CT进行三维重建.
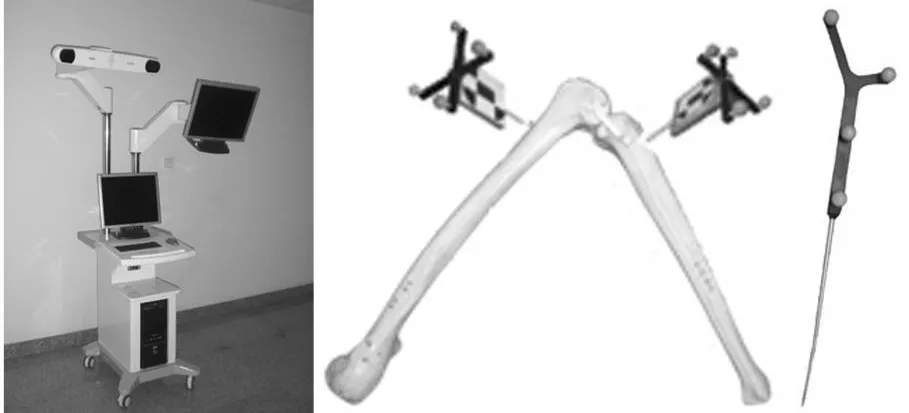
图5 实验平台、关节模型骨及探针
前交叉韧带(ACL,Anterior Cruciate Ligament)的植入点在股骨髁间窝和胫骨平台,因此这两个部位的变形最重要,选取其作为导航测试区域.利用 OpenGL工具包建立三维测试环境,进行ACL重建的仿真评估.采用 NDI定位仪标定过的探针模拟手术器械,其尖点在 Marker坐标系下的空间坐标可实时得到,利用该探针在塑料骨的股骨髁和胫骨平台表面滑动,采集关节骨骼表面特征.图 6所示为变形前后的股骨模型.
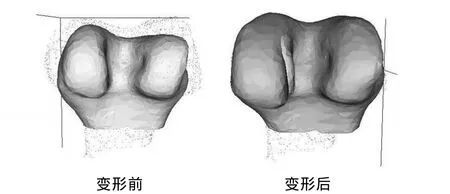
图6 变形前后的CT模型和术中点云
骨骼形变的精度取决于计算机的自动控制和人为交互,求解变形后的 CT重建模型和医生进行数字化的骨面特征之间的均方根误差.如果它大于 1mm,则此次形变是不合格的,需要重新采集点云.本文进行了 300次实验,随机抽取其中的20次数据分析,如表 1所示,其中仅有 2次测得的误差超过 1mm.剔除这 2次结果重新实验,得到的结果是 0.803mm,证明超过 1mm的误差是医生的操作引起的,与骨骼形变算法无关.由于骨骼形变精度主要取决于覆盖骨骼表面的点云,点云数量需要至少 300个点,且均匀分布于骨骼表面,否则形变误差较大.将探针放在骨骼表面不同位置,计算机中显示探针针尖,计算尖点和变形后点的欧几里德距离,股骨最大为 0.838mm,胫骨最大为 0.916mm.产生误差的原因包括定位器误差、探针误差、刚体的位移、配准和重建的数学误差、Kriging算法的插值误差等.
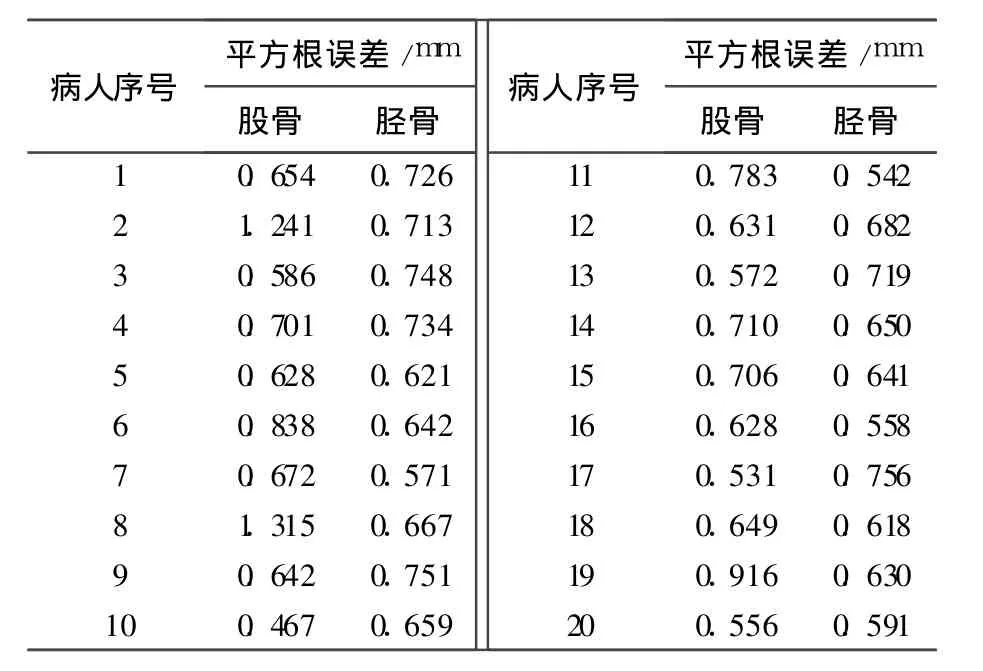
表 1 骨骼形变的精度
4.2 导航应用实验
验证韧带重建手术是否成功的重要标准[12]主要是两点.利用该文提出的形变技术进行了针对 ACL重建的术后仿真和评估.图 4所示为 CT模型的形变流程,将变形后的三维模型保存成STL文件,读入自行开发的“无图像导航下的 ACL重建仿真评估系统”.利用探针在塑料模型骨上点取植入点位置,重建虚拟 ACL,胫骨绕股骨按人体运动方式旋转,观察 ACL是否与骨骼面碰撞以及不等距值的变化,如图 7所示.不等距值不发生变化,表示重建的 ACL符合不等距性;反之则不符合.从图 7中可以发现在胫骨运动时,虽然ACL有不同程度的延长或收缩,但重建 ACL的不等距值保持不变,为 2.360 039mm,证明重建的ACL符合不等距性,变形后的 CT模型可以用于ACL重建的导航评估.
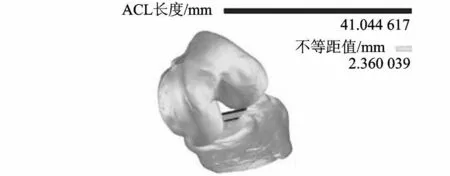
图7 ACL术后导航评估
5 结 论
本文提出了一种基于 Kriging算法的三维骨骼形变技术,将该技术用于 ACL重建的导航评估手术,取得了良好的效果,术中形变经过多次实验均在 1min以内.在本文的实验条件下形变后精度在1mm以内,证明该方法可以用于膝关节ACL重建术后导航评估,并且流程简单,不需要复杂的图像分割,具有一定的通用性.该技术能够提高手术质量,减轻医生手术的疲劳程度,降低医患辐射伤害和手术成本.但是,该技术只是初步用于模型骨的导航评估功能实验,其精度还有待于进一步的提高,并应用于 ACL的重建手术规划中,例如可以帮助医生进行植入点的规划、显示植入隧道等.总之,骨骼技术对于实时三维显示骨骼缺陷、手术钻孔规划、移植物的尺寸选择、根据骨骼冠状面的移植物位姿的选择等将会有重要且深远的意义.
References)
[1]Nolte L P,Thomas B.Basic principles of CAOS[J].Care Injured,2004,35(1):6-16
[2]王君臣,王田苗,徐源,等.基于 ICP算法的手术导航三维配准技术[J].北京航空航天大学学报,2009,35(4):434-438 Wang Junchen,Wang Tianmiao,Xu Yuan,et al.Registration method based on ICP algorithm for 3D surgical navigation[J].Journal of Beijing University of Aeronautics and Astronautics,2009,35(4):434-438(in Chinese)
[3]Fleute M,Lavallee.Building a complete surface model from sparse data using statistical shape models[J].MICCAI,1998:879-887
[4]Stindel E,Briard J L,Merloz P,et al.Bone morphing:3D morphological data for tool knee arthroplasty[J].Computer Aided Surgery,2002:156-168
[5]Chan C S,Edwards P J,Hawkes D J.Integration of ultrasound based registration with statistical shape models for computer-assisted orthopaedic surgery[J].SPIE,Medical Imaging,2003:414-424
[6]Kumar T R,Johannes H,Nolte L P,et al.Bone morphing with statistical shape models for enhanced visualization[J].Medical Imaging,2004,5367:122-130
[7]Kumar T R,Martin A S,Haydar T,et al.Statistical deformable models for robust 3D surface extrapolation from sparse data[J].Medical Image Analysis,2007,11(2):99-109
[8]Plaweski S,Pearle A,Granchi C,et al.PRAX IM ACL navigation system using bonemorphing:Navigation and MIS in orthopedic surgery[M].Berlin:Springer,2007:315-323
[9]Pena E,Calvo B,Martinez M A,et al.Influence of the tunnel angle in ACL reconstructionson the biomechanics of the knee joint[J].Clin Biomech,2006,21(5):508-516
[10]Mǜller J,Mang A,Buzug T M.A template-deformation method for facial reproduction[C]//Proceedings of the 4th International Symposium on Image and Signal Processing and Analysis.Croatia:Institute of Electrical&Electronics Engine,2005:359-364
[11]Timothy SN,Hong Y.A survey of the marching cubes algorithm[J].Computer&Graphics,2006,30:854-879
[12]Markus F,Stéphane L,Rém i J.Incorporating a statistically based shape model into a system for computer-assisted anterior cruciate ligament surgery[J].Medical Image Analysis,1999,3(3):209-222
(编 辑:文丽芳)
3Dmorphing method based on Kriging algorithm for surgical navigation
Hu Yan Wang Tianmiao Wang Junchen Hu Lei
(School of Mechanical Engineering and Automation,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
A setof preoperative CT reconstructed model can not beused in operating on individual patient in 3D surgical navigation systems.According to the problem above,a 3D bone morphing method based on Kriging algorithm was presented.Two point sets,one of which was acquired from physical space by the optical localizer and the other was from 3Dmodel reconstructed by the marching cube method,were used to calculate the transformation matrix between the preoperative CT image space and the intra operative marker space.Then 4 appropriate reference points were chosen to solve the equations based on Kriging algorithm,and the positions of points on CTmodel after deformation respect to the physical case were acquired.At last,precision analysis of morphing and evaluation experiment of knee jointnavigation was carried out with CT and plastic model.The result shows that under this condition the final morphing accuracy is less than 1mm,and this technology can be used in operation evaluation of the anterior cruciate ligament navigation reconstruction.
knee joint;surgical navigation;Kriging;registration;bone morphing
TP 391.9
A
1001-5965(2010)05-0555-05
2009-04-07
国家杰出青年科学基金资助项目(60525314);国家科技支撑计划资助项目(2006BAI03A 16);北京市科技计划资助项目(D 020602500001093)
胡 岩(1979-),男,山东济南人,博士生,buaarobot@126.com.
猜你喜欢
计测技术(2022年1期)2022-04-18
中老年保健(2021年5期)2021-12-02
中华骨与关节外科杂志(2021年12期)2021-08-31
中老年保健(2021年5期)2021-08-24
医学新知(2019年4期)2020-01-02
北京航空航天大学学报(2017年2期)2017-11-24
医学研究杂志(2015年9期)2015-07-01
医学研究杂志(2015年12期)2015-06-10
兵工学报(2012年8期)2012-02-23
少年科学(2009年12期)2009-07-07
