
某新型火炮随动系统的性能测试系统设计
2010-03-13 08:54姜少飞闫英敏李鹏程
电子设计工程 2010年5期
姜少飞, 闫英敏, 赵 霞 , 李鹏程
(1.军械工程学院 河 北 石 家庄 0 50003;2.76324部队 广 西 桂 林541001)
某新型火炮随动系统为数字式随动系统,用于驱动火炮炮塔,是整个自行高炮武器系统的核心部分。火炮随动系统性能的优劣将直接影响防空武器系统的整体作战效果,因此必须进行随动系统性能参数的测试,以判定其是否满足性能指标的要求,为武器系统的保障维修提供依据[1]。这对保证装备处于良好状态、提高系统战斗效能、提高训练效果、降低维修成本、使部队尽快形成基本保障能力,都有重要意义。
本文利用DSP和CAN总线技术的良好性能设计了火炮随动系统性能测试系统。数字信号处理器DSP具有高速、强大的数据处理能力及丰富的外设资源,CAN总线是一种多主串行通信协议,可有效地支持分布式实时传输,具有较强的抗干扰能力。将DSP与CAN总线技术相结合,系统的可靠性和实时性能也得到很大提高[2]。
1 测试系统总体结构设计
1.1 测试系统测试对象分析
本设计要对角位移、跟踪速度和加速度3个能够反映系统性能的重要参量进行准确实时的测量,从而正确评价火炮随动系统的性能。角位移信号的变化情况反映了位置式随动系统的工作状态变化,角速度和加速度的大小也能反映出系统调转快速性和跟踪快速性的好坏。
根据火炮随动系统的内部结构可推知[3],方位、高低系统的跟踪速度和方位、高低执行电机的转速存在线性关系,对执行电机转速进行测试,再根据积分、微分运算就可以得到系统的角位移和角加速度,进而可对火炮随动系统进行性能分析。
1.2 测试系统总体结构分析
测试系统整体结构如图1所示。系统由上位机和下位机两部分组成,其都选用了TI公司的TMS320系列DSP器件TMS320LF2407A作为中央处理核心[4]。下位机通过霍尔式传感器负责实时采集高低方位执行电机的转速信号,经过DSP捕获单元(CAP)转换后通过核心处理器件DSP进行数据处理和分析,计算出跟踪速度、角位移和加速度,利用CAN总线把实时数据传输给上位机。上位机配有键盘输入和LCD显示,负责发送控制命令,并接收下位机送来的采样数据,对火炮随动系统的性能参数进行实时监测。

图1 系统整体结构框图
2 测试系统硬件设计
2.1 下位机硬件总体设计
设计选用TMS320LF2407A为核心构建火炮随动系统性能测试装置的硬件电路,完成对所需监测的转速信号的采集、数据处理以及数据传输等功能。整个下位机硬件系统的结构框图如图2所示。

图2 下位机硬件结构框图
2.2 CAN总线通信接口电路
内置于LF2407A的CAN总线控制器可以用来完成CAN总线通信协议CAN2.0B的物理层和数据链路层的全部功能。LF2407A的CAN控制器是一个16位的外设模块,具有以下特性:提供6个邮箱对象,其数据长度为0~8个字节;针对邮箱0、1和2、3有局域接收屏蔽寄存器;可编程波特率;可编程中断配置;可编程的CAN总线唤醒功能;总线错误诊断功能;自测试模式。
CAN总线通信的硬件电路如图3所示。为了进一步提高系统的抗干扰能力并保护DSP器件,在LF2407A控制器和收发器PCA82C250之间增加了由高速光电隔离器6N137构成的隔离电路,实现了总线上各节点间的电气隔离。光耦部分电路所采用的两个电源必须完全隔离,故电源模块采用B0505S-1W现场总线专用的电源模块。PCA82C250通过引脚8与地直接相连,采用高速方式[5],因此系统用屏蔽双绞线进行数据传输,30 m以内可以提供1 Mb/s的传送速率,且必须在双绞线两端连接两个120 Ω的匹配电阻来消除长线反射所引起的干扰。
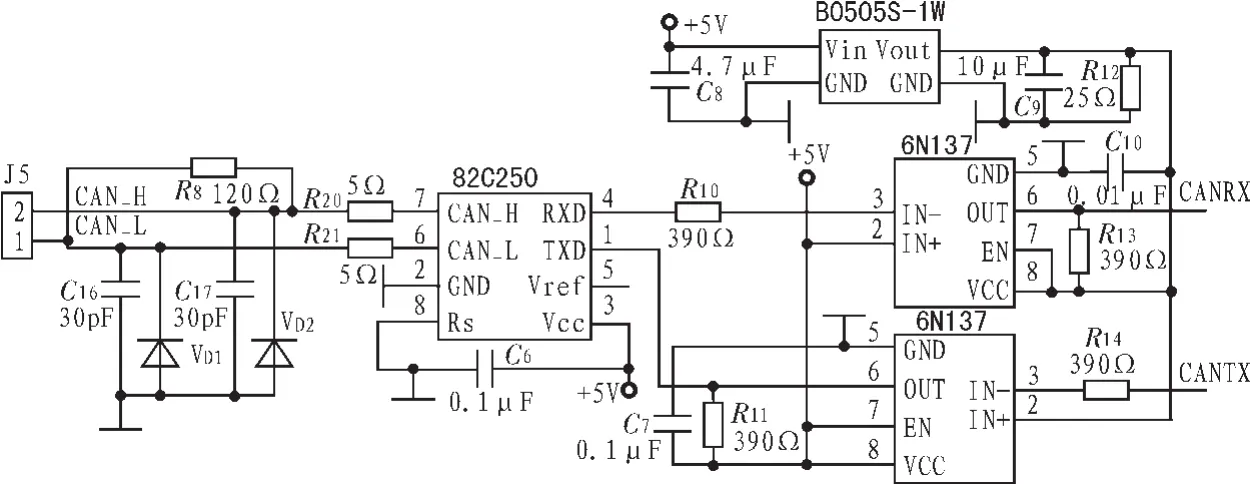
图3 CAN总线通信接口电路
3 测试系统应用软件设计
3.1 软件总体设计
TMS320LF2407A 的软件设计和调试是在DSP集成开发环境CCS2000下进行的,采用C语言和汇编语言相结合的方式编写,在软件功能调试完成后,就可以将程序固化在片内的Flash内,在上电时加载程序。
系统软件设计的主要流程如图4所示,首先系统程序进行初始化,启动DSP定时器和捕获单元,采集转速传感器输出的信号,然后对采集数据进行处理分析,DSP与CAN控制器之间以响应中断方式实现通讯。经过数据处理后的数据送给LCD显示,以对数据进行保存和分析,并扫描有效按键,判断键值,并进入相应的处理。
3.2 数据采集模块
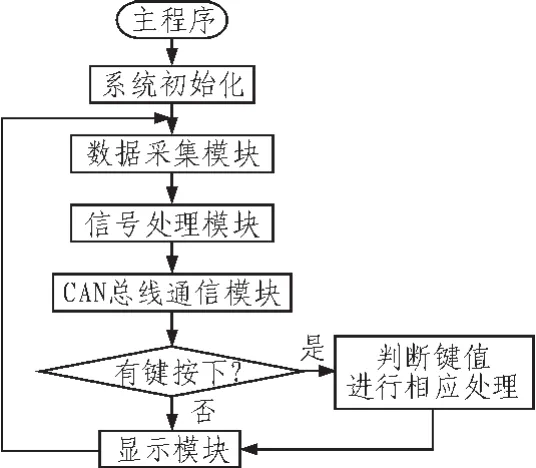
图4 主程序流程
霍尔式传感器输出的转速信号为脉冲信号,则对脉冲信号的频率进行测量即可测出转速的大小。利用LF2407A器件上的事件管理器(Event Manager)模块带有的通用定时器和捕获单元可完成计数和测量计算任务。
将转速信号送入EVB的CAP6引脚,选择定时器3作为其独立时间基准,采用中断的方式捕获计数值,实现对转速信号的测量。本系统时钟频率为40 MHz,计数器最大计数为0xFFFF,即65 535,而方位、高低执行电机的频率范围大致为1~600 Hz。为使精度最高,将通用定时器控制寄存器T3CON的TPS2~TPS0设置为011,选8分频,则定时器3每隔T=8/40 MHz=0.2 ms计数一次。测速主程序如图5所示。

图5 测速主程序
进入捕获中断子程序后,首先清CAP6中断标志位,从2级深度FIFO中依次读出两次捕获的计数值num1和num2,进而可得在被测信号的一个周期内定时器T3的脉冲数m。如果num2大于num1,则直接相减之差即为脉冲数m;若num2小于num1,则说明在计数过程中有计数溢出,即计数到周期寄存器T3PR内写入0xFFFF后回零重新计数,因此再求脉冲数m=num2-num1+0xFFFF。则可得电动机转速信号大小为n=60 m/zT,其中,m为一个周期内的定时器T3脉冲数,z为霍尔传感器的磁钢数,T为定时器采样周期。根据执行电机转速和跟踪速度关系可推导出随动系统的跟踪速度,再经数字积分和微分运算就可得到系统的角位移和角加速度。
4 实验结果
在完成了整个测试系统各部分硬件和软件设计调试之后,将编写好的软件烧入LF2407A板的Flash中,然后对火炮随动系统进行性能测试。这里仅以测试火炮随动系统的动态性能为例。利用正弦机给定方位系统θ=2 000密位的阶跃响应[6],在整个系统运行时,由LF2407A每20 ms记录一次系统的角位移,每次记录采样100点,利用DSP的集成开发工具CCS2000采用描点法对记录数据进行处理,可以方便显示出时间与角位移的关系,如图6所示。由响应跟踪曲线可看出最大峰值时间为1.401 5 s,超调量为0.869 2%,上升时间1.368 9 s,过渡时间1.334 s。由以上数据可以看出随动系统在阶跃响应下具有很好的响应快速性,跟踪测试能够达到预期的精度。
5 结论
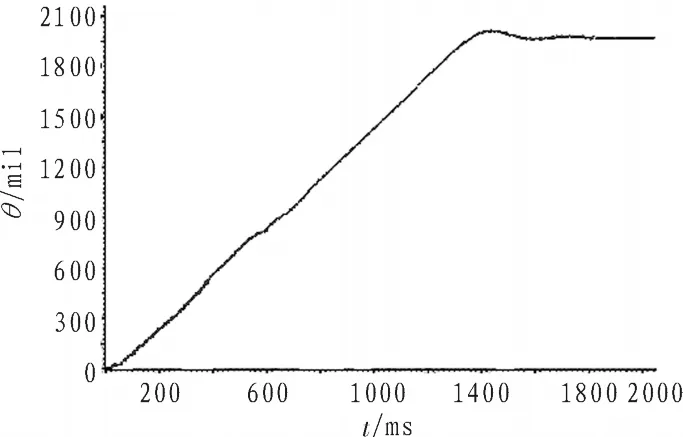
图6 方位系统阶跃响应跟踪曲线
测试系统以TMS320LF2407A为核心处理器,借助DSP高速的处理速度、强大的数据处理功能,有足够的时间完成数据采集、数据处理分析和数据传输等任务。系统数据传输采用CAN现场总线,增强了系统的开放性和通信的可靠性,并且有良好的可扩展性。该系统在实际检测中已经得到了可靠性检测,效果良好。
[1]朱新华.某自行高炮使用及性能检测与故障诊断[M].石家庄:军械工程学院,1999:41-63.
[2]WU Yong,QIN Juan-ying.CAN bus system based on DSP[J].Industrial Control Computer,2002(6):13-17.
[3]孙世宇,段修生.某自行高炮火控计算机与火炮随动系统[M].石家庄:军械工程学院,1995:24-31.
[4]刘和平,王维俊,江渝,等.TMS320LF240x DSP C语言开发应用[M].北京:北京航空航天大学出版社,2003:13-24.
[5]饶运涛,邵继军,郑勇芸.现场总线CAN原理与应用技术[M].北京:北京航空航天大学出版社,2003:3-23.
[6]李永军.电液伺服阀性能测试系统研究[D].吉林:吉林大学,2008.
猜你喜欢
心理学报(2022年4期)2022-04-12
水泵技术(2021年3期)2021-08-14
机电信息(2021年17期)2021-07-01
内燃机与配件(2020年22期)2020-09-10
小哥白尼(军事科学)(2020年2期)2020-06-16
课程教育研究·学法教法研究(2018年14期)2018-08-11
光学仪器(2016年5期)2017-01-12
中国惯性技术学报(2015年1期)2015-12-19
测绘科学与工程(2013年3期)2013-03-11
军事历史(1988年3期)1988-08-16
