状态PI调节器在D-STATCOM双闭环控制中的应用
2010-02-07 01:50唐杰邓志勇杨志红
中南大学学报(自然科学版) 2010年6期
唐杰,邓志勇,杨志红
(1. 邵阳学院 电气工程系,湖南 邵阳,422000;2. 邵阳电业局,湖南 邵阳,422000)
状态PI调节器在D-STATCOM双闭环控制中的应用
唐杰1,邓志勇2,杨志红2
(1. 邵阳学院 电气工程系,湖南 邵阳,422000;2. 邵阳电业局,湖南 邵阳,422000)
针对D-STATCOM的强耦合特性,分析D-STATCOM的系统构成,在构建dOq坐标系下D-STATCOM系统数学模型的基础上,将基于状态PI调节器的最优跟踪控制策略和模糊自适应PI控制分别应用于D-STATCOM系统的电流内环和电压外环控制。研究结果表明:该控制策略使系统的无功电流和有功电流都具有很好的动态和稳态响应,在3 ms内即可达到稳态,且稳态时电流误差为0 A;在无功负荷突加时系统时响应速度快,所需时间大约为3个工频信号周期;该控制策略性能优良,结构简单,容易实现,满足D-STATCOM电压补偿的要求。
配电静止同步补偿器(D-STATCOM);电能质量;双闭环控制;模糊控制;状态PI调节器
配电静止同步补偿器(Distribution static synchronous compensator,D-STATCOM)是一种重要的“用户电力”装置,能综合治理配电网中的多种电能质量问题[1−4]。当 D-STATCOM 用于改善配电网的动态电压质量时,要求其具有快速的电压响应。而D-STATCOM逆变器响应速度的提高受如下2个因素的制约:(1) 连接电抗电流不能突变;(2) 动态过程中有功电流和无功电流的耦合作用。因此,当D-STATCOM主电路拓扑及其参数确定后,控制器是影响D-STATCOM装置响应速度的关键因数,控制器采用何种控制策略显得至关重要。国内外众多学者对D-STATCOM(STATCOM)电压控制策略进行了大量研究。传统的PI控制[5−7]、单周控制[8]、协调控制[9]、基于状态反馈的线性控制[10−11]、非线性控制[12]、智能控制[13]等都在D-STATCOM电压控制器设计中得到了有效应用。对于采用直接电流控制的 D-STATCOM,电流跟踪控制对D-STATCOM的控制效果起着非常重要的作用。在此,本文作者从D-STATCOM系统的数学模型出发,重点论述采用状态PI调节器的电流内环控制器的设计。针对D-STATCOM系统数学模型的强耦合、非线性特性,将模糊自适应PI控制和状态PI调节器引入D-STATCOM电压控制器中,取得了很好的控制效果。
1 dOq坐标系下 D-STATCOM 系统的数学模型
D-STATCOM 的基本结构如图 1所示。D-STATCOM 通过耦合变压器接入系统。图 1中:R为包含变压器损耗的开关通态电阻;L为变压漏抗;Rdc为开关损耗用直流侧并联电阻。C为直流侧电容,电压为udc;ua,ub和uc为公共连接点电压;ea,eb和ec为D-STATCOM逆变器输出电压;ia,ib和ic为输出电流;idc为直流侧电流。
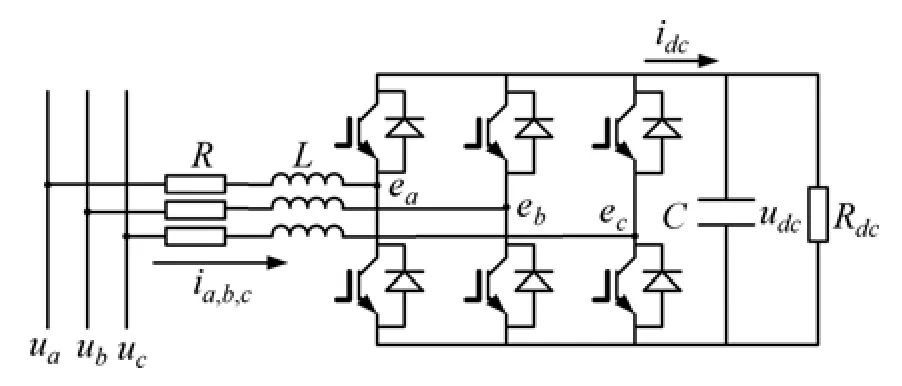
图1 D-STATCOM系统构成Fig.1 Configuration of D-STATCOM
假设三相电网电压对称,只考虑基波成分,在三相(a,b,c)静止坐标系中,根据基尔霍夫电压定律建立D-STATCOM的动态方程,有
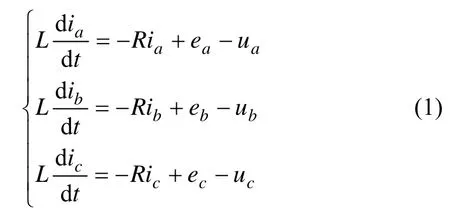
引入d-q变换,可得dOq坐标系下D-STATCOM的电压电流方程为:

式中:ed和eq分别为同步旋转坐标系中D-STATCOM逆变器输出电压的d和q分量;id和iq分别为逆变器输出电流的d和q分量。派克变换矩阵为:

式中: 为电网电压角频率。
由式(2)得到的 D-STATCOM 系统结构如图 2所示。

图2 D-STATCOM系统结构Fig.2 Structure of D-STATCOM
从式(2)和图2可以看出:D-STATCOM系统中d和q轴电流不独立,存在交叉耦合现象,即D-STATCOM逆变器输出电压的d和q分量的变化会同时影响到逆变器输出电流d和q分量的变化。因此,D-STATCOM(被控对象)是一个典型的耦合系统。
考虑到D-STATCOM电压控制器的控制目标是公共连接点电压u和直流侧电容电压udc,在设计D-STATCOM电压控制器时,必须同时考虑直流侧电容电压的控制。根据D-STATCOM交/直流侧瞬时功率平衡原理,可以得到直流侧电容电压方程为:
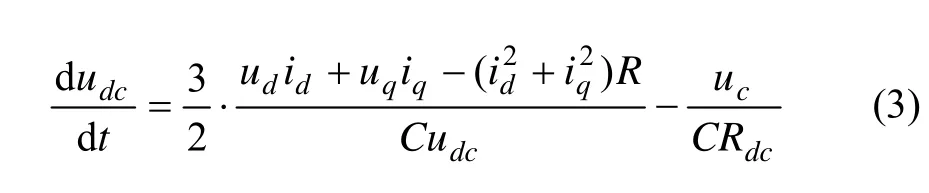
式(2)和式(3)即为dOq坐标系中D-STATCOM的数学模型。
从D-STATCOM的数学模型可以看出:对于dOq坐标系下采用电流直接控制的D-STATCOM系统是1个两输入两输出的耦合非线性系统。这给D-STATCOM控制器的设计带来了难度。
2 D-STATCOM的双闭环控制器
针对以上D-STATCOM数学模型的特点,本文作者提出将模糊自适应PI控制和状态PI调节器应用于D-STATCOM电压控制中。电压外环采用模糊自适应PI控制,使得电压外环控制器具有很好的动态性能和自适应性能;电流内环采用状态PI调节器,避免了在设计控制器过程中要考虑有功电流和无功电流的耦合作用,给控制器的设计带来了极大的方便。
本文提出的D-STATCOM电压控制器的结构图如图3所示,其中F_PI表示如图4所示的模糊自适应PI控制器。

图3 D-STATCOM电压控制器结构Fig.3 Voltage control block of D-STATCOM

图4 Fuzzy-PI控制器结构Fig.4 Block of Fuzzy-PI controller
在如图3所示的D-STATCOM电压控制器中,将公共连接点电压反馈值u与其给定值U*进行比较,产生的误差经模糊自适应 PI调节器后形成无功电流指令值;直流侧电容电压反馈值udc与其给定值U相比,产生的误差经模糊自适应PI调节器后形成有功功电流指令值。无功电流指令值和有功电流指令值作为电流内环的输入。电流内环控制器采用状态PI调节器完成无功电流和有功电流的跟踪控制,以达到电压外环要实现的控制目的(即维持公共连接点电压和直流侧电容电压恒定)。电压外环控制器的设计可按常规模糊自适应PI控制器的设计进行。
3 基于状态 PI调节器的电流内环控制策略
最优控制理论已经在电力电子装置中得到应用[14−15],本文应用状态 PI调节器[16]实现 D-STATCOM输出电流的最优跟踪控制。状态PI调节器实现最优跟踪控制与 LQI[17−18]实现最优跟踪控制相比具有优越性。
3.1 状态PI调节器的基本原理
设受控对象为:
其中: x ∈Rn,为状态向量;u∈R,y∈R,分别为控制控制输入和系统输出;(A, B, C)为相应的系数矩阵,且(A, B)可控,(A, C)可观测。
本文的设计任务是寻找一个控制律 u,使系统的输出y能最优地跟踪参考信号ys。为此,将式(4)改写成如下形式:

以式(7)所描述的系统为受控对象,并定义二次型性能指标为:
其中:Q=HTH≥0;M>0;且(A, H)可观测。
由标准线性二次型最优控制理论可得:

其中:[K1K2]为黎卡提方程

式(9)中状态向量的稳态值 xs可以根据稳态时相应的参考输出ys进行计算[15]。
3.2 电流内环状态PI调节器的设计
将式(2)表达成状态方程的形式,得:

于是,可得D-STATCOM系统线性部分的形式(式(5))的状态空间描述,即
K1和K2可由式(10)求得。在设计具体控制器时,式(8)中的加权矩阵M一般可选为单位阵。Q可采用文献[12]中的方法进行选择。于是,可得到D-STATCOM电流内环控制器的结构如图5所示。

图5 D-STATCOM电流内环控制器结构Fig.5 Control block of inner current control loop
4 仿真与实验验证
为了验证本文提出的D-STATCOM电流内环状态PI调节器的有效性,在 Matlab/simulink环境下对D-STATCOM系统进行仿真研究。
案例针对有机废水中的①3,4-二氯苯胺、②对氨基苯磺酸、③ 2,4-二硝基苯肼、④ 双酚A、⑤ 酸性橙、⑥间甲酚紫6种有机污染物,实验探究了不同温度下Fenton氧化降解有机物的去除率及反应动力学;在Fenton试剂过量、假定反应初期为一级反应动力学速率常数的基础上,通过Arrhenius方程计算获得6种有机物的Fenton反应活化能Ea。
D-STATCOM仿真系统原理如图6所示(以单相电路图表示)。D-STATCOM通过连接电抗器接入电网。系统中:负荷1为固定负荷;负荷2为用来模拟产生电压跌落的无功负荷。
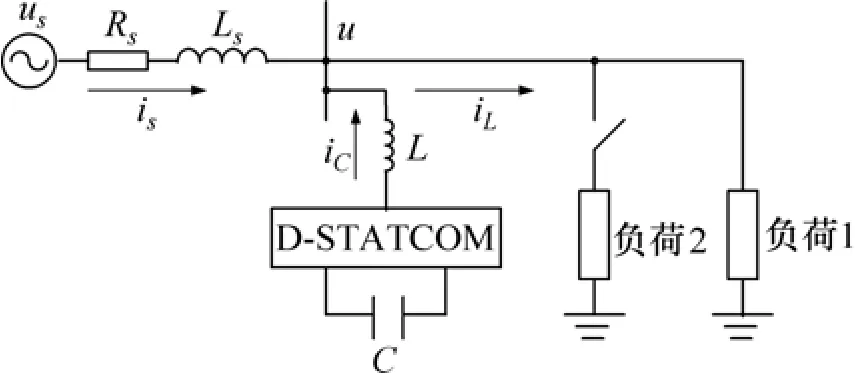
图6 D-STATCOM仿真系统原理图Fig.6 Schematic diagram of D-STATCOM for simulation
根据 D-STATCOM 补偿系统的电气参数,系统仿真参数如下:电源电压为380 V;频率为50 Hz;D-STATCOM直流侧电容量为2 200 μF;直流侧电容电压给定值为500 V;SPWM载波频率为10 kHz;连接电抗器等效电感为2 mH;等效电阻为0.2 Ω。
根据D-STATCOM数学模型,经计算得到以下控制器参数。
公共连接点电压控制器初始参数为:KP=2,Ki=100
直流侧电容电压控制器初始参数为:KP=0.8,Ki=80
电流内环最优跟踪控制器参数为:

图7所示为电流内环控制器中无功电流和有功电流的阶跃响应曲线。从图7可见:与传统的控制方法相比,无功电流和有功电流都有很好的动态和稳态响应。
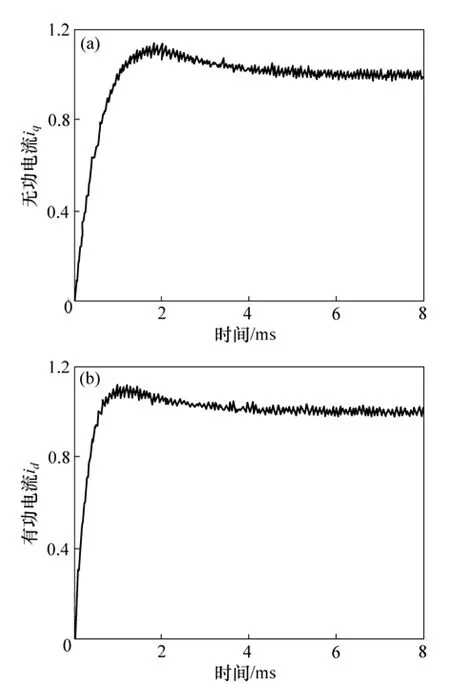
图7 无功和有功电流的阶跃响应Fig.7 Step response of iq and id
为了进一步验证本文所提出的电流内环状态 PI调节器的有效性和可行性,将其应用于实验室±50 kVar D-STATCOM装置,并利用DSP实现。实验方案与上述仿真方案类似。在实验过程中,采用的无功负荷为感性无功负荷柜。待D-STATCOM稳定运行后,突加感性无功负荷。
图8所示为突加感性无功负荷时D-STATCOM指令电流和 D-STATCOM 输出电流之间的误差曲线(上位机监控系统)。从图8可知:D-STATCOM输出电流能很好地跟踪 D-STATCOM 的指令电流(即因突加感性无功负荷所产生的无功电流),稳态时电流误差为0 A。实验结果表明:基于状态PI调节的电流内环控制器具有很好的电流跟踪性能。

图8 电流误差曲线Fig.8 Curve of current error
图9所示为无功负荷突加时公共连接点电压的单相电压波形。从图9可以看出:由无功负载突加时引起的电压跌落得到了有效补偿,且响应速度也比较理想,所需时间大约为3个工频信号周期。
5 结论
(1) 针对D-STATCOM数学模型非线性、强耦合的特点,利用模糊自适应PI控制器设计D-STATCOM电压外环控制器,提高了系统的自适应能力。当系统参数发生变化或有外部干扰时,控制器能自动调整控制参数,以保持控制器的控制性能。
(2) 利用状态PI调节器设计电流内环控制器,提高了系统的无功电流补偿跟踪能力。
(3) D-STATCOM 双闭环控制系统可以提高无功补偿速度,所需时间大约为3个工频信号周期。
(4) 将外环模糊自适应PI控制器和电流内环采用状态PI调节器相结合,避免了有功电流和无功电流相互耦合给控制器设计带来的困难,控制器结构也相对简单,容易实现。仿真和实验结果证明了本文所提出的方法的正确性和有效性。
[1] 陈志业, 尹华丽, 李鹏. 电能质量及其治理新技术[J]. 电网技术, 2002, 26(7): 67−70.
CHEN Zhi-ye, YIN Hua-li, LI Peng. Power quality problem and new technology for its improvement[J]. Power System Technology, 2002, 26(7): 67−70.
[2] 林海雪. 现代电能质量的基本问题[J]. 电网技术, 2001,25(10): 5−12.
LIN Hai-xue. Main problems of modern power quality[J]. Power System Technology, 2001, 25(10): 5−12.
[3] 雷宪章, Retzmann D, Weinhold M. 利用电能质量调节器改善配电网络的电能质量[J]. 电网技术, 2000, 24(8): 8−12, 39.
LEI Xian-zhang, Retzmann D, Weinhold M. Enhancing power quality in distribution system with power conditioners[J]. Power System Technology, 2000, 24(8): 8−12, 39.
[4] 朱桂萍, 王树民. 电能质量控制技术综述[J]. 电力系统自动化, 2002, 26(19): 28−40.
ZHU Gui-ping, WANG Shu-min. A survey on power quality control technology[J]. Automation of Electric Power Systems,2002, 26(19): 28−40.
[5] Freitas W, Morelato A, Xu W, et al. Impacts of AC generators and DSTATCOM devices on the dynamic performance of distribution system[J]. IEEE Tran on Power Delivery, 2005,20(2): 1493−1501.
[6] Sun J, Czarkowski D, Zabar Z. Voltage flicker mitigation using PWM based distribution STATCOM[C]//Power Engineering Society Summer Meeting. Chicago, 2002: 616−621.
[7] Lehn P W. A benchmark system for simulation of the D-STATCOM[C]//Power Engineering Society Winter Meeting.IEEE, 2002: 496−498.
[8] 张军利. 单周控制DSTATCOM的建模及实现[J]. 陕西理工学院学报: 自然科学版, 2009, 25(1): 22−26, 30.
ZHANG Jun-li. Modeling and implementation of DSTATCOM based on one-cycle control[J]. Journal of Shanxi University of Technology: Natural Science Edition, 2009, 25(1): 22−26, 30.
[9] 范瑞祥, 沈斐, 涂春鸣. 基于限值判断的D-STATCOM分频协调控制方法[J]. 电力系统自动化, 2009, 33(4): 67−71.
FAN Rui-xiang, SHEN Fei, TU Chun-ming. Frequncy dividing coordinated control method for D-STATCOM based on the limit values judgment[J]. Automation of Electric Power Systems,2009, 33(4): 67−71.
[10] Lehn P W, Iravani M R. Experimental evaluation of STATCOM closed loop dynamics[J]. IEEE Tran on Power Delivery, 1998,13(4): 1378−1384.
[11] Pranesh Rao, Crow M L, YANG Zhi-ping. STATCOM control for power system voltage control applications[J]. IEEE Trans on Power Delivery, 2000, 15(4): 1311−1317.
[12] 张敏, 朱红萍, 王俊年, 等. 静止同步补偿器的非线性鲁棒H∞控制[J]. 电工技术学报, 2005, 20(5): 35−44.
ZHANG Min, ZHU Hong-ping, WANG Jun-nian, et al.Nonlinear robustH∞control for static synchronous compensator[J]. Transactions of China Electrotechnical Society,2005, 20(5): 35−44.
[13] Singh B, Solanki J, Verma V. Neural network based control of reduced rating DSTATCOM[C]//IEEE Indicon Conference.Chennai, India, 2005: 516−520.
[14] 孙孝峰, 魏坤, 邬伟扬, 等. 三相变流器最优控制研究[J]. 中国电机工程学报, 2004, 24(7): 168−172.
SUN Xiao-feng, WEI Kun, WU Wei-yang, et al. Optimal control of three phase converter[J]. Proceedings of the CSEE, 2004,24(7): 168−172.
[15] 颜伟, 朱继忠, 徐国禹. UPFC线性最优控制方式的研究及其对暂态稳定性的改善[J]. 中国电机工程学报, 2000, 20(1):45−49.
YAN Wei, ZHU Ji-zhong, XU Guo-yu. Enhancement of power system stability using linear optimal control strategy of UPFC[J].Proceedings of the CSEE, 2000, 20(1): 45−49.
[16] JIANG Guo-ping, SONG Wen-zhong. On tracking problems for continuous state feedback system[J]. The Journal of China Universities of Posts and Telecommunications, 2000, 7(1/2):69−74.
[17] Hagiwara T, Yamasaki T, Araki M. Two-degree-of-freedom design method of LQI servo system: Disturbance rejection by constant state feedback[J]. International Journal Control, 1996,63(4): 703−719.
[18] Aida K, Kitamori T. Design of PI-type state feedback optimal servo system[J]. International Journal Control, 1990, 52(3):613−625.
(编辑 陈灿华)
Double closed loop control for distribution static synchronous compensator based on state PI feedback control
TANG Jie1, DENG Zhi-yong2, YANG Zhi-hong2
(1. Department of Electrical Engineering, Shaoyang University, Shaoyang 422000, China;2. Shaoyang Electric Power Bureau, Shaoyang 422000, China)
Considering coupling characteristics of the mathematic model of D-STATCOM, configuration of D-STATCOM was analyzed and the mathematic model in thedOqcoordinate was constructed. The state PI feedback control method based on optimal tracking control was adopted in the inner loop current control and the fuzzy adaptive PI controller was used in the outer loop voltage control. The results indicate that the system has a good dynamic and steady state response to active and reactive current using the control strategy, the steady-state can be reached in 3 ms and the steady-state error is 0 A. It also has an excellent response time about 3 frequency current when sudden reactive load is added. The control strategy proposed has excellent performance and is easy to be used.
distribution static synchronous compensator; power quality; double closed loop control; fuzzy control; state PI feedback control
TM464
A
1672−7207(2010)06−2282−06
2009−12−21;
2010−03−05
湖南省自然科学基金资助项目(07JJ6081)
唐杰(1975−),男,湖南武冈人,博士,副教授,从事电力系统谐波抑制和无功功率补偿的研究;电话:13087268732;E-mail:tang_jie4952@yahoo.com.cn
猜你喜欢
时尚设计与工程(2022年3期)2022-08-10
科技进步与对策(2021年13期)2021-07-08
湖南城市学院学报(自然科学版)(2020年4期)2020-08-18
表面工程与再制造(2019年1期)2019-12-04
中国微创外科杂志(2018年9期)2018-10-09
宇航计测技术(2018年3期)2018-09-08
腹腔镜外科杂志(2016年12期)2016-06-01
腹腔镜外科杂志(2016年11期)2016-06-01
汽车与新动力(2015年1期)2015-02-27
汽车与新动力(2014年6期)2014-02-27