大型光学望远镜扇形子镜拼接设计及仿真分析*
2010-01-25 07:58宋家宝李国平
天文研究与技术 2010年4期
宋家宝,李国平
(1. 中国科学院国家天文台南京天文光学技术研究所,南京 210042;2.中国科学院天文光学技术重点实验室,南京 210042;3.中国科学院研究生院,北京 100049)
从1608年第一台望远镜的发明到现在,望远镜的口径从当初的几厘米增大到现在的8~10m,望远镜制造的相关技术在不断地改进和革新。如今,镜面拼接和自适应光学是建造地面大型光学望远镜的两项重要技术。Keck望远镜首先应用镜面拼接技术建成了世界上第一个10米级的大型望远镜。此后,一批10米级的望远镜相继建成并投入使用,如HET,GTC,SALT等。此外,国外拼接镜面口径达30m的TMT[1]和42m的E-ELT[2]望远镜都已在设计和建造中。我国30m级大型光学望远镜CFGT也在紧密的预研中。
1 国际上主要的大型拼接镜面望远镜
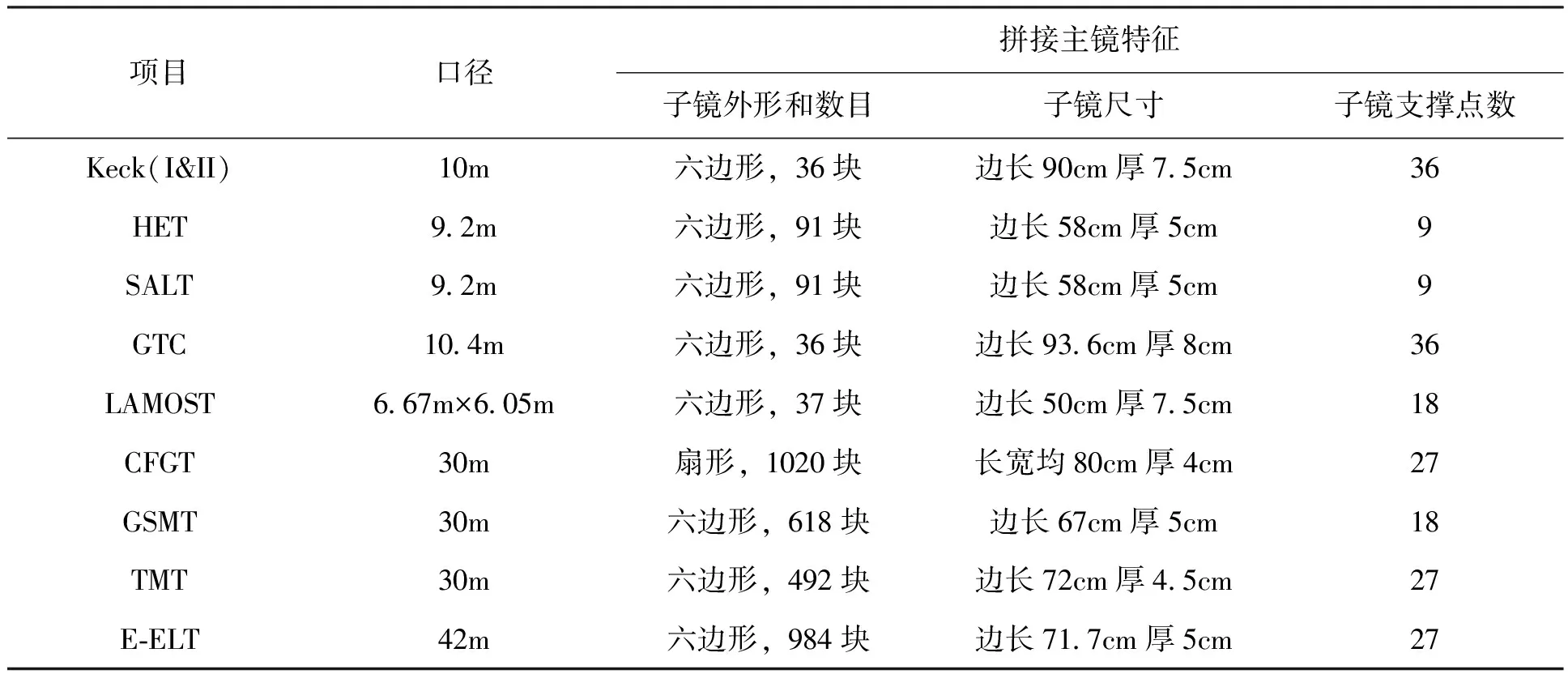
表1 国际上主要的大型拼接镜面望远镜[1-3]
2 主镜总造价与子镜尺寸
目前,国际上大型拼接镜面望远镜采用的子镜几乎都是六边形,显然这是由于六边形的中心对称性使得采用六边形子镜有很多方面的优点。就拼接主镜而言,拼接子镜尺寸的选择也是一个关键,对于一个大口径的主镜,其子镜的尺寸大小也有其优缺点[4-5]。以选择较小的尺寸为例:子镜可以做得更薄,质量更轻,减少了制造设备、检测、运输的花费;降低了支撑结构的复杂性;减少了单块子镜的非球面度,减少了各个子镜位置误差对拼接镜面成像质量的影响。但与此同时其缺点也很明显:增加了位置传感器、位置促动器的数量和子镜模型数量;增加了望远镜的重量和子镜装配的难度;使控制系统更加复杂。因此,选择适当的子镜尺寸对望远镜的整体造价有着很大的影响。
在已建造和待建造的大型拼接镜面望远镜中,绝大部分子镜的尺寸在1~2m之间。图1为主镜总造价与子镜尺寸大小关系的一个参数示意图[4]。
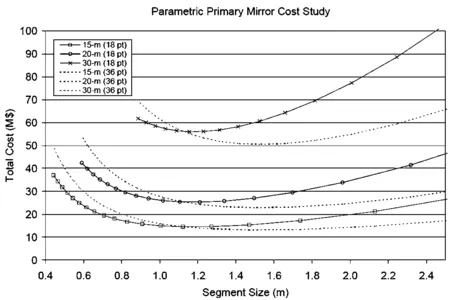
图1 主镜总造价与子镜大小关系参数图Fig.1 Cost of a primary mirror vs. its segment size
图中对比了口径分别为15m,20m,30m级主镜的总造价与子镜尺寸的联系。主镜总造价考虑了镜胚、子镜磨制、促动器、传感器以及子镜支撑结构等多方面的造价。虚线为36支撑点,实线为18支撑点。图中所示造价为选择子镜尺寸提供了一个参考,由于一些费用数据是估计得到的,故图中数值不能作为精确的造价值。
3 六边形子镜与扇形子镜
采用六边形子镜拼接镜面只是一种方法。用扇形子镜来拼接镜面就是一种很有特色的方案。表2列举了六边形子镜的优缺点[5],表3列举了扇形子镜的优缺点[5]。
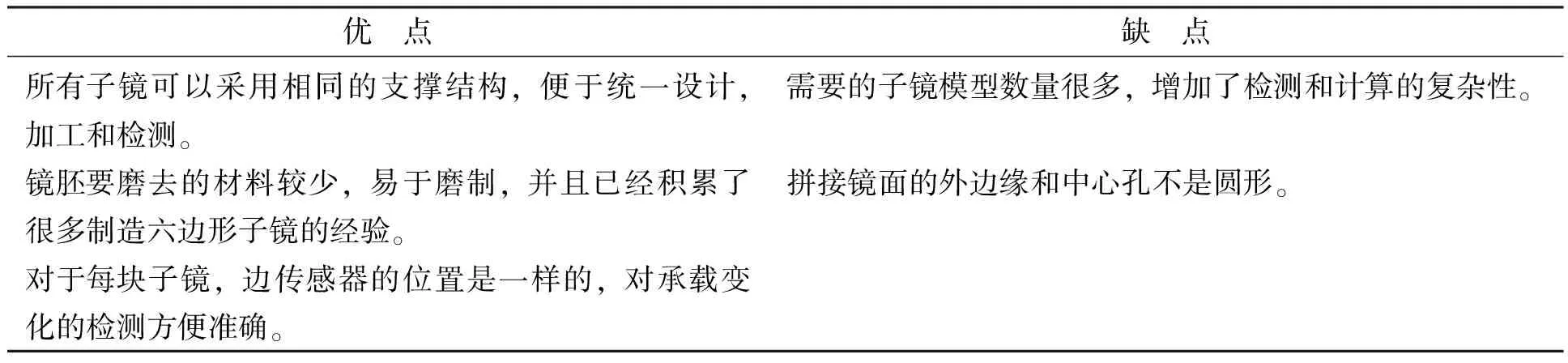
表2 六边形子镜的优缺点
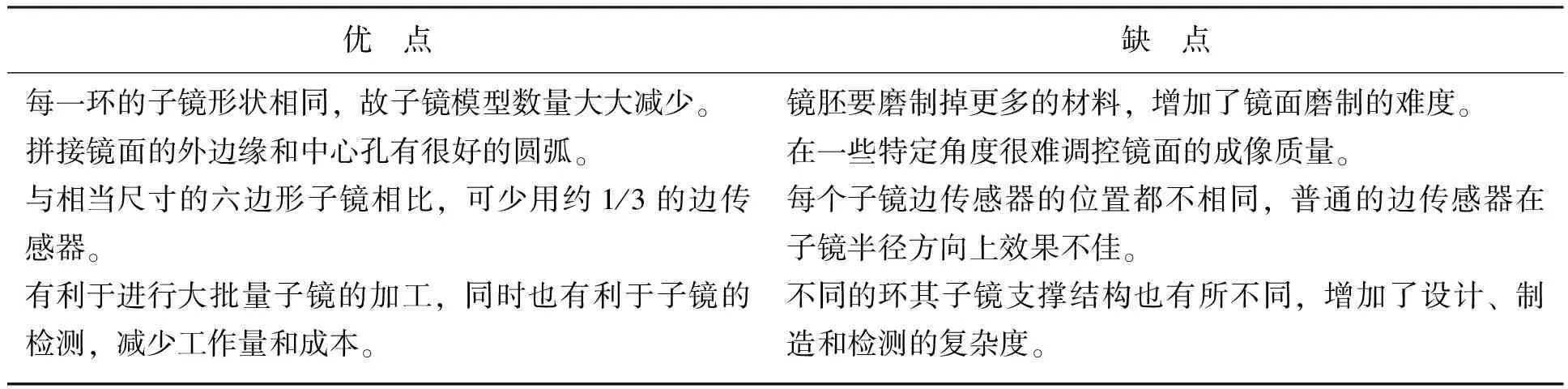
表3 扇形子镜的优缺点
4 模型分析和比较
要建造30m级口径的大型望远镜,采用拼接镜面是必然的。目前,采用六边形子镜的拼接镜面已经得到了广泛应用。但是,采用扇形子镜拼接成大型镜面在世界上还没有实际的应用。在六边形子镜拼接技术不断成熟的条件下,如果要采用扇形子镜拼接大型镜面,就必须在预研时做够充分的分析和比较,得到确切的结果。显然,这是一项繁杂的比较工作,在此主要做扇形子镜支撑方面的初步分析比较。
图2为30m级口径的拼接主镜,六边形和圆环扇形子镜拼接镜面各取一半的对比示意图。
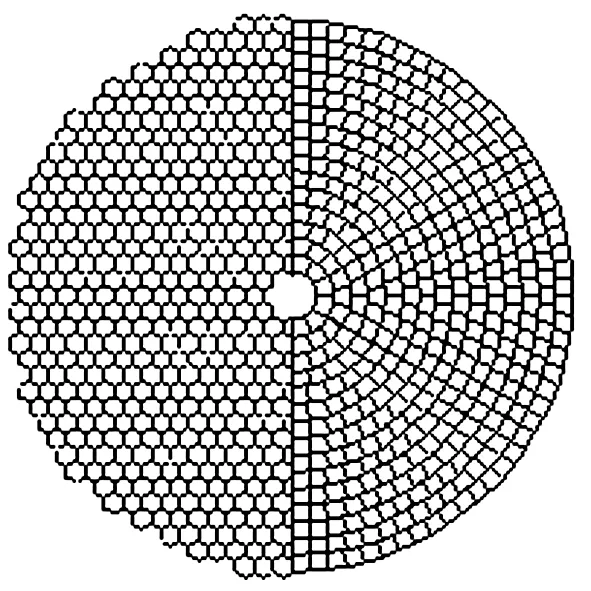
图2 六边形和圆环扇形子镜排列示意图Fig.2 Comparison of arrays of hexagonal and sector-shaped segments
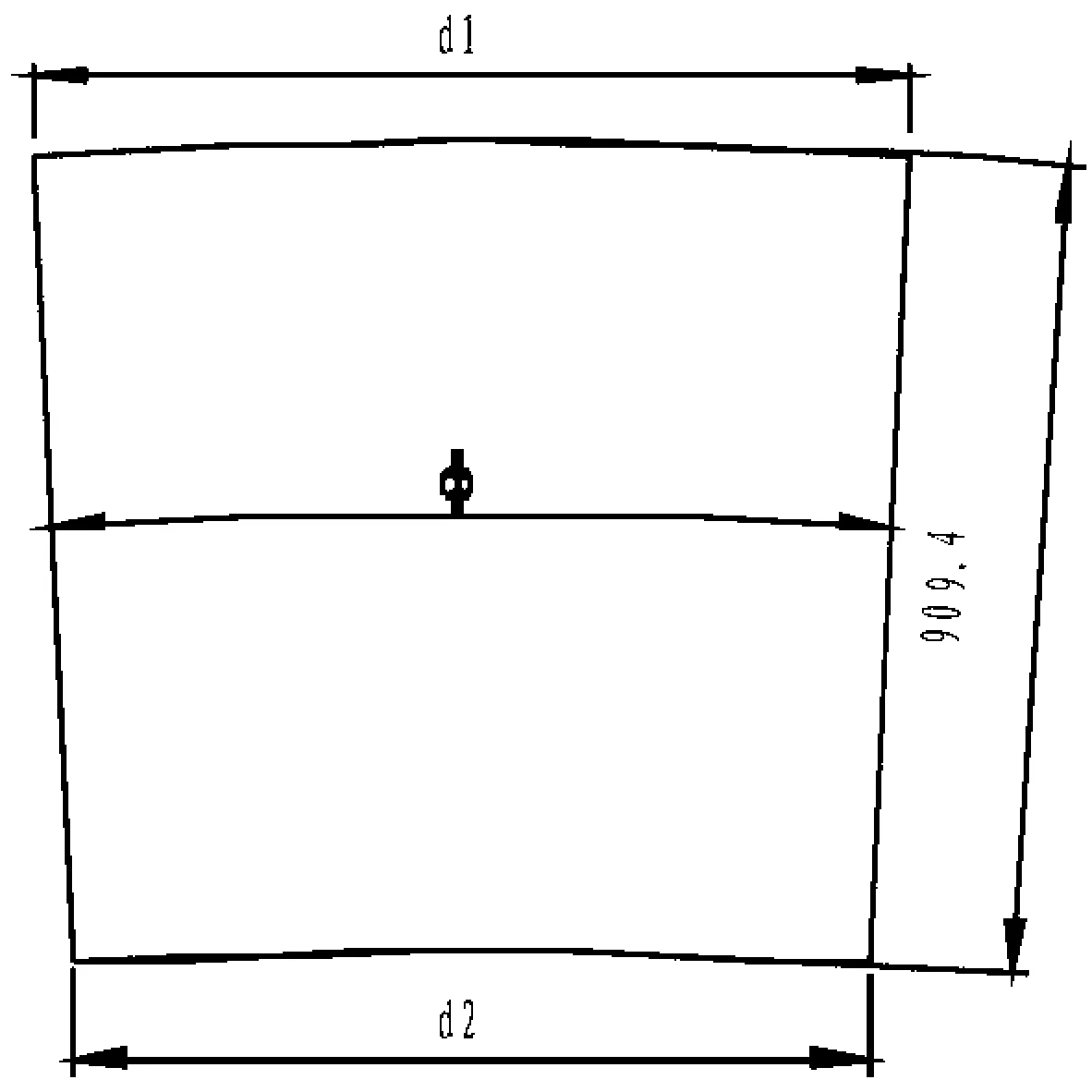
图3 扇形圆环子镜尺寸示意图Fig.3 Dimensions of a sector-shaped segment
文中拼接主镜由810块扇形圆环子镜拼接成15个同中心的环面,从内至外共15环。第1环有12块然后每环递增6块,到第15环则为156块。图3为扇形圆环子镜尺寸示意图,每环子镜的具体尺寸值见表4。

表4 各环扇形子镜的尺寸
在参阅了很多大型拼接镜面的子镜的尺寸以及相应的支撑点数目[1-2,6]后,文中六边形子镜和扇形子镜均采用18点支撑,如图4。扇形和六边形子镜的材料选用是德国SCHOTT公司的微晶玻璃ZERODUR,玻璃材料ZERODUR的机械性能常数如下:弹性模量9.03e10Pa,密度2.53e3Kg/m3,泊松比0.247。六边形子镜边长57.7cm,厚5cm。子镜厚度均取为5cm。
由于扇形拼接主镜最内5个环的子镜扇形角度太大,为了得到较好的镜面支撑效果,其支撑方式与其他环的扇形子镜的支撑方式有所不同。
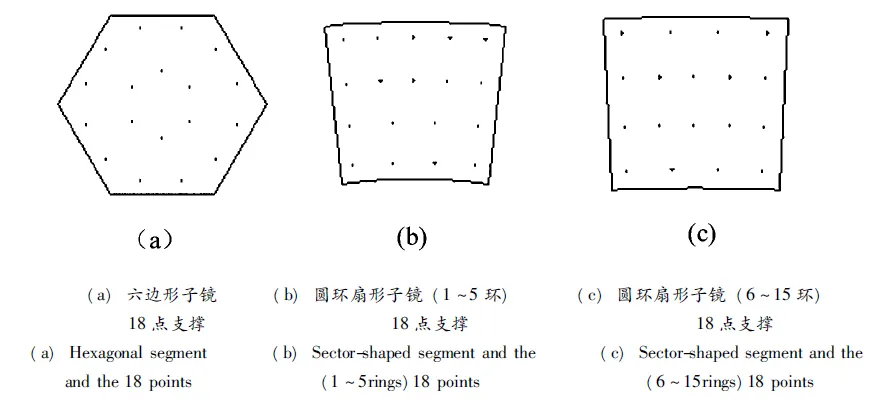
图4 六边形和扇形子镜的18点轴向支撑Fig.4 Hexagonal and sector-shaped segments with 18 axial-support points
子镜采用不同的支撑方式,支撑点数目和支撑点位置,得到的镜面RMS值会有很大的差异。支撑点数目太少,镜面在自重的作用下会变形过大,影响镜面精度;支撑点数目太多,会给镜面带来较大的波纹起伏,并且增加成本和工作难度[7]。六边形子镜的支撑[1-2]在多篇文章中已有详尽的研究,在此主要探讨扇形子镜的18点的最优支撑。
在对扇形子镜采用不同的支撑分布对比分析后,4-5-5-4的行排列支撑方式[6],即如图4中(c)圆环扇形子镜(6~15环)支撑最为合适。要得到最优的镜面支撑效果,每一环的镜面支撑点间的距离也就各不相同。取第11环子镜为例,子镜厚5cm,具体尺寸如表4中所示,用ANSYS建立模型,如图5:划分网格(a),节点数2600多个,计算在自重作用下镜面在水平位置0°(b),倾斜45°(c),垂直90°(d)的变形。从图5中的(b)可以看到:在此支撑点排列下,镜面变形均匀,接近最优支撑分布。
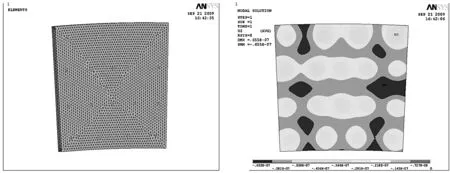
(a)扇形子镜的网格划分 (b)水平位置时镜面的变形(a)Finite-element grid of a sector-shaped segment (b)Surface distortion of a sector-shaped segment laid horizontally
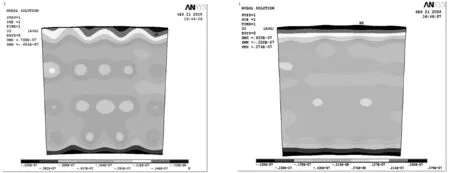
(c)倾斜45°时镜面的变形 (d)垂直位置时镜面的变形(c)Surface distortion of a segment 45° from vertical (d)Surface distortion of a segment put vertically图5 第11环扇形子镜的网格划分和在不同位置时的镜面变形Fig.5 Finite-element grid and surface distortion of a sector-shaped segment in the 11th ring
对于六边形子镜,采用已有的优化支撑方式[2],用ANSYS建立模型,子镜边长57.7cm,厚5cm,如图6:划分网格(a),节点数2600多个,计算在自重作用下镜面在水平位置0°(b),倾斜45°(c),垂直90°(d)的变形。
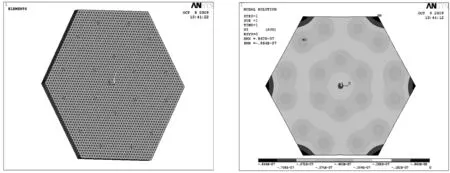
(a)六边形子镜的网格划分 (b)水平位置时镜面的变形 (a)Finite-element grid of a hexagonal segment (b)Surface distortion of a hexagonal segment laid horizontally
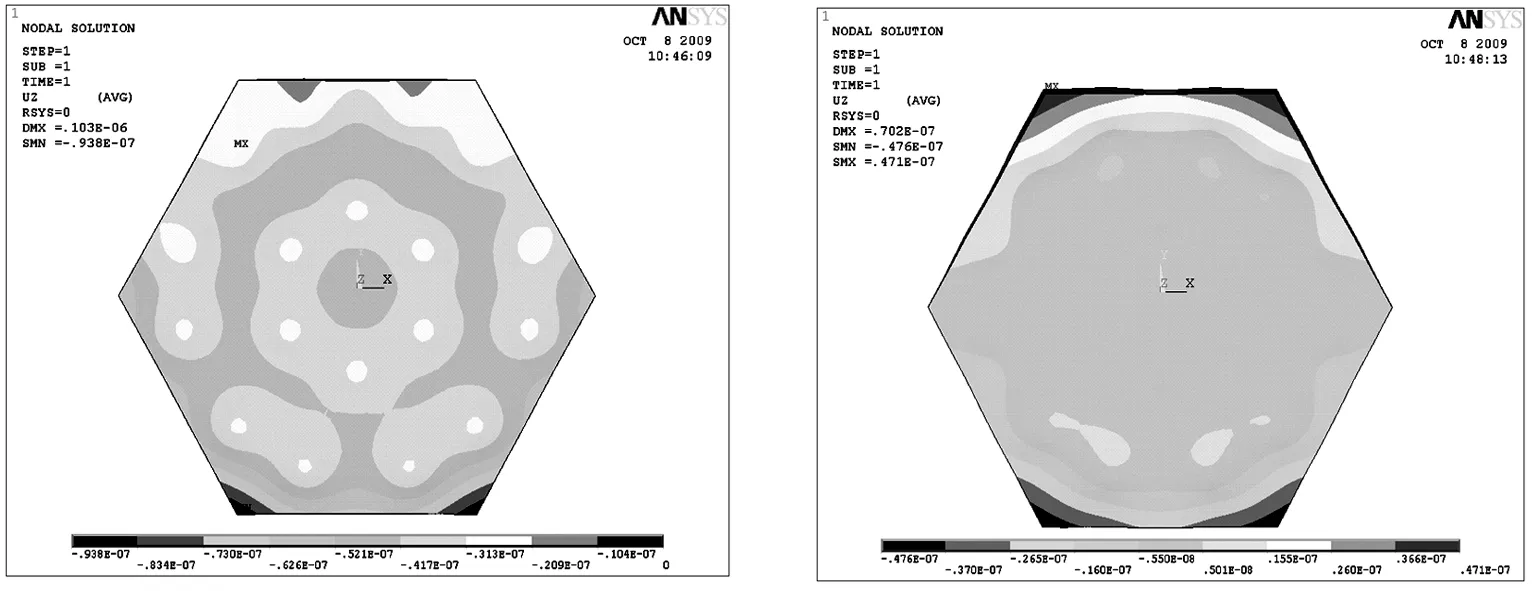
(c)倾斜45°时镜面的变形 (d)垂直位置时镜面的变形(c)Surface distortion of a segment 45° from vertical (d)Surface distortion of a segment put vertically 图6 六边形子镜的网格划分以及在不同位置时的镜面变形Fig.6 Finite-element grid and surface distortion of a hexagonal segment
用ANSYS分别计算出在自重作用下六边形子镜和扇形子镜各自在水平位置,倾斜45°,垂直位置时镜面的变形量。依次导出子镜模型在不同位置时镜面各节点轴向位移参数,将其导入Excel工作表中计算出镜面变形RMS值。六边形子镜模型只有一种,扇形子镜模型从内环到外环依次编号为1,2,…,15。计算所得RMS值如表5。
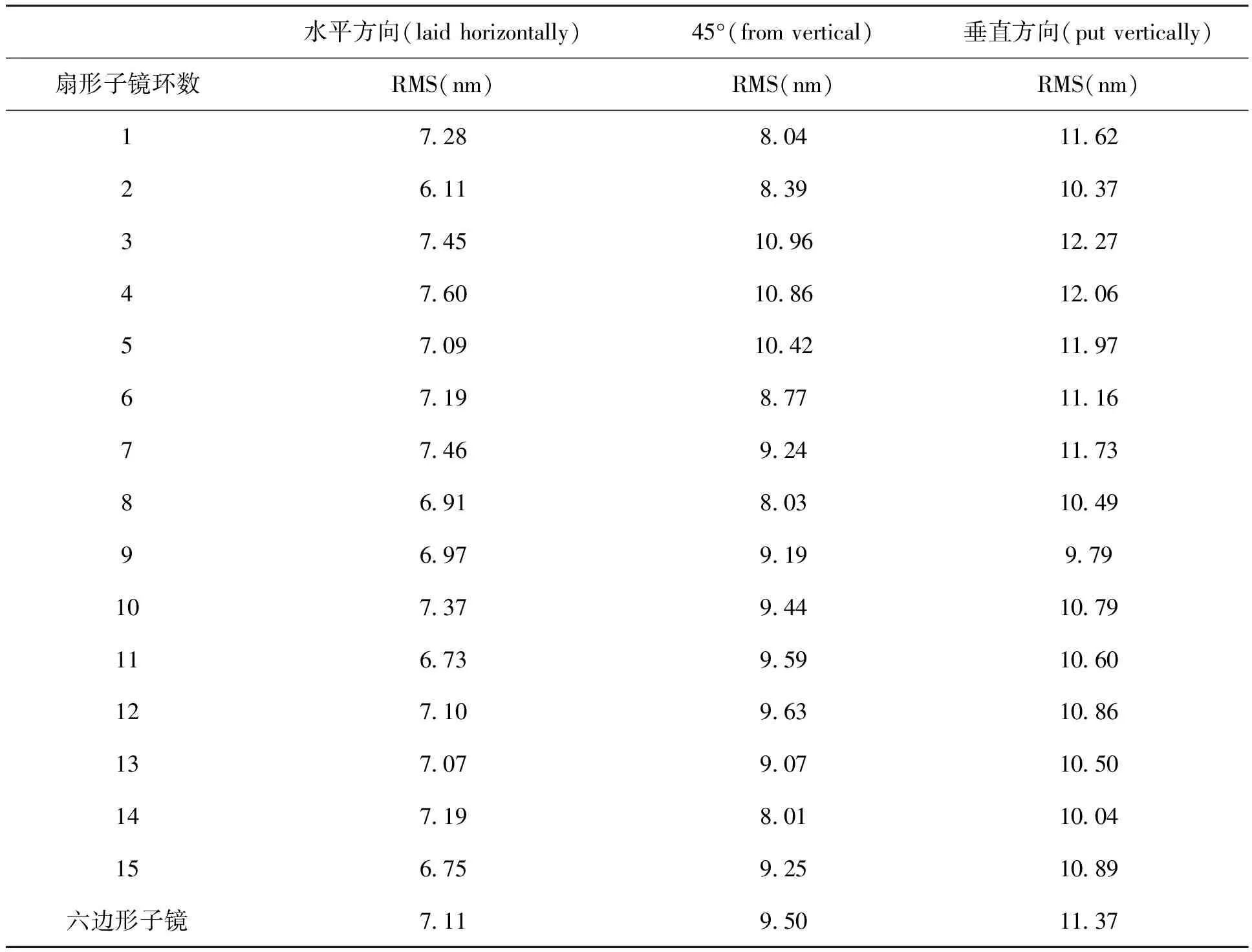
表5 各子镜在水平、垂直、倾斜45°位置的镜面变形参数
5 结 论
在ANSYS分析中,六边形子镜和扇形子镜模型的材料特征参数,镜面面积,厚度都相同,子镜支撑点数目均为18,并优化了支撑位置。在相同的网格划分程度下,镜面模型划分的节点数均为2600多个。计算分析得到的结果表明:在面积和支撑点数目均相同的条件下,扇形子镜在理论上可以获得与六边形子镜近似的镜面RMS值,但是由于不同环数之间其子镜的形状各不相同,要使每环子镜都得到最优或接近最优的镜面精度,就必须确定每环子镜各自的最优支撑位置。与六边形子镜同一的外形和相同的支撑结构相比,在实际应用中扇形子镜的支撑,镜面调控将面临更大的难度和复杂性。但制造扇形子镜只需少量的子镜模型数目使扇形子镜保留着很好实用前景。
[1] Eric C Williams,Cnrtis Baffes,Terry Mast,et al.Advancement of the Segment Support System for the Thirty Meter Telescope Primary Mirror[J].SPIE,2008,7018:701810.
[2] Lluis Cavaller,Juan Marrero,Javier Castro.Design of the primary mirror segment support system for the E-ELT[J].SPIE,2008,7012:70121F.
[3] Xuefei Gong.Design and Analysis of Support System of LAMOST Primary Mirror[J].SPIE,2003,4837:667-674.
[4] Terry Herter,Bernhard Brandl,Steve Eikenberry.The Large Atacama Telescope(LAT)Project[J].SPIE,2003,4837:1-10.
[5] Steph E Strom,Larry Stepp.Giant Segmented Mirror:a point design based on science drivers[J].SPIE,2003,4840:116-129.
[6] 孙守雄,王国民.大型光学望远镜扇形子镜支撑方法的探讨[J].天文研究与技术—国家天文台台刊,2008,5(2):176-181.
Sun Souxiong,Wang Guomin.Support Technique of Giant Sector-shaped Segmented Mirror Telescope[J].Astronomical Research & Technology,2008,5(2):176-181.
[7] 高明辉,杨近松,何斌,等.超薄反射镜支撑技术[J].光学技术,2003,29(5):611-613.
Gao Minghui,Yang Jinsong,He Bin,et al.Support Technique of Ultra Thin Mirror[J].Optical Technique,2003,29(5):611-613.
猜你喜欢
大学数学(2022年6期)2023-01-14
小哥白尼(趣味科学)(2021年6期)2021-11-02
光电工程(2020年9期)2020-09-29
童话世界(2018年32期)2018-12-03
中国公路(2017年15期)2017-10-16
学生导报·高中版(2017年23期)2017-09-10
学生导报·初中版(2017年23期)2017-09-10
中国光学(2017年4期)2017-08-01
百姓生活(2017年6期)2017-06-10
光学精密工程(2016年11期)2016-12-19