
无刷电机反电势IIR滤波及其DSP实现
2010-01-08 07:28:38寇治国
杭州电子科技大学学报(自然科学版) 2010年5期
寇治国
(杭州电子科技大学电子信息学院,浙江杭州310018)
无刷电机反电势IIR滤波及其DSP实现
寇治国
(杭州电子科技大学电子信息学院,浙江杭州310018)
转子位置信息的获得是无位置传感器无刷直流电动机控制的关键,传统的反电势检测法在滤除高频干扰时的相位延迟难于补偿;通过在DSP上实现反电势信号的IIR数字滤波,消除噪声对反电势信号的影响,获得正确的反电势过零点。该方法在基于DSP的无位置传感器无刷直流电动机控制平台上进行实验验证,实测数据证明该方法可以有效滤除高频干扰,准确的获得反电势过零点,性能可靠,灵活性和实用性较高。
无刷直流电机;反电势过零点检测;数字滤波;相位延迟
0 引 言
无刷直流电机应用电子换相替代机械换相,使电机不但具有传统的直流电机良好的调速性能,而且寿命长、维护简单,在众多领域得到了广泛应用。采用无位置传感器控制技术以后,克服了有位置传感器的许多弊病,进一步拓宽了无刷直流电机的应用领域。目前,无刷直流电机无位置传感器控制技术已成为无刷直流电机控制技术的一个重要发展方向,无位置传感器控制技术研究的核心和关键是设计一个检测转子位置信号的方法,可以从软硬件两个方面来间接获得转子位置信号。近年来,国内外出现了很多位置检测估计方法,其中较为成熟的主要有:反电势法、反电势积分法、续流二极管法和状态观测器法[1]。其中,反电势法算法简单、软硬件比较容易实现、可靠性高和成本较低,是目前无位置传感器无刷直流电机中最常用的一种控制方法。但传统的反电势法无位置传感器将端电压作分压模拟低通滤波处理后,由于滤波器的相位延迟导致获得的转子位置信号比真正的反电势过零点延迟了一定的角度,而且该相位延迟角随频率的不同而不同。这就要求通过实验测量出不同运行频率下的换相延迟角,用于补偿相位偏移,而且延迟角一旦大于30°,造成因为换相不准而导致电机失步。所以传统反电势法无位置传感器存在换相角计算复杂,运行频率不高的缺点。本文提出了一种改进后的无位置传感器控制方法,介绍了该方法的基本原理和检测电路,并通过实验分析了改进后的无位置传感器控制器的优点。
1 反电势法基本原理
反电动势是永磁式电机转子转动时,由定子绕组所产生的电压,反电动势的幅值与电机转速成正比。反电势法确定换相时刻的基本原理是在忽略永磁无刷直电动机电枢反应影响的前提下,通过检测“断开相的反电势过零点”,来依次得到转子的6个关键的转子位置信号,并以此作为参考依据,轮流触发导通逆变器的功率管,驱动电动机正常运转,所以反电势过零点的检测是反电势检测法的关键,但是端电压信号中含有PWM斩波信号及换向时因电枢绕组电流引起的电抗电势等干扰信号,使端电压波形发生畸变,反电势波形中会出现多个零点信号,影响电机正常的转换逻辑,使电机无法正常工作。要消除这些干扰信号对电机换向产生的影响,常采用的方法是将端电压进行低通滤波,滤除这些高频干扰信号,然后与参考电平比较,获得绕组反电势的过零点。
2 数字滤波
无刷直流电机的反电动势信号不是一个平滑的信号,从其他相耦合的PWM噪声使得不能准确检测到该信号的过零事件,因此必须对该信号进行滤波[2],但是,对信号进行滤波存在一个固有的缺点,无论信号滤波是以数字式完成还是在硬件电路中完成,滤波信号与实际信号相比总是存在一些相位延迟。但是,与硬件电路滤波相比,使用数字滤波器时,给定滤波器的要求以及反电动势信号的频率就可以准确的计算出相位延迟,然后将下次换相的刻减去计算出来的相位延迟,就可以准确的进行电机换相。本文使用了IIR滤波器,因为与具有类似响应特征的FIR滤波器相比,FIR滤波器需要更高阶数,所以IIR滤波器DSP运算的时间相对较短,而且IIR滤波器与有类似响应的FIR滤波器相比,具有更短的相位延迟周期[3]。

图1 滤波器特性
本文使用Matlab来设计IIR滤波器。在实时处理中,若滤波器阶数过大,将会导致系统数学计算的处理时间过长,难以满足实时性。因此,要求在满足滤波要求的情况下,滤波器阶数尽量小。在此系统中需要滤除的高频干扰为频率为20kHz的PWM斩波信号,保留频率较小的低频反电势信号,并且在满足条件下使滤波器的阶数最低,通过权衡奈闺斯特定理以及DSP的AD转换器的性能,选择滤波器的采样频率50kHz,带通频率4kHz,带阻频率8kHz,滤波器阶为5阶。设计出的滤波器频率响应特性、群延迟特征如图2所示,群延迟曲线显示了滤波信号相对于给定电气旋转频率的实际反电动势信号的延迟。假设一个4极对电机最大转速为10 000 r/min,即每秒最大电气旋转为666.7转。按照图1的群延迟曲线,在666.7Hz处滤波信号将有约127μs的相位延迟。在0Hz时,相位延迟约为125μs。两个延迟时间的差异可忽略,因此在电机的整个速度范围中可将相位延迟当作一个常量。
3 DSP控制系统的实现
本文的无刷电机控制体统结构如图2所示,处理器采用TI公司最新推出的C2000系列的TMS320F28035,该处理器与其它的DSP有了很大的改进[4,5],它集成度高,除了内部集成了RAM和FLASH/OTPROM,配备两个工作频率10MHz的片上振荡器,采用单电源供电,只要3.3V就可以稳定工作,所以本控制系统集成度高,性能强而成本低,反电势的电压由DSP内部集成的ADC高速转换,该ADC具有12位的分辨率,使用内部参考源也可以达到10.9位的精度。本系统最为重要的是使用了F2803X系列DSP芯片中独具的浮点控制律加速器(CLA)技术。CLA是一款32位浮点数学加速器,能独立于C28x内核进行工作,CLA自带中断控制器,并可直接访问ADC与EPWM等外设,从而可实现对片上外设的直接存取以及算法的并行执行,独立执行控制环路算法,并可与C28x并行工作。从而将该CPU解放出来用以处理I/O与反馈回路,可使通用闭环应用性能提高5倍,信号流程为:先使用简单的电阻分压网络采集电机的三相端电压和电源电压信号,直接进入DSP进行高速模数转换(ADC),ADC的转换频率为50kHz,高于采样信号中最高频率为20kHz的PWM信号的2倍,满足奈闺斯特取样定理,当AD转换完成后,AD模块产生中断触发CLA处理器直接读取转换结果,及进行IIR滤波的乘加等运算;C28x主处理器负责定时比较CLA的滤波结果,当产生反电势过零信号后,控制PWM模块进行换相,驱动电机正常运转。
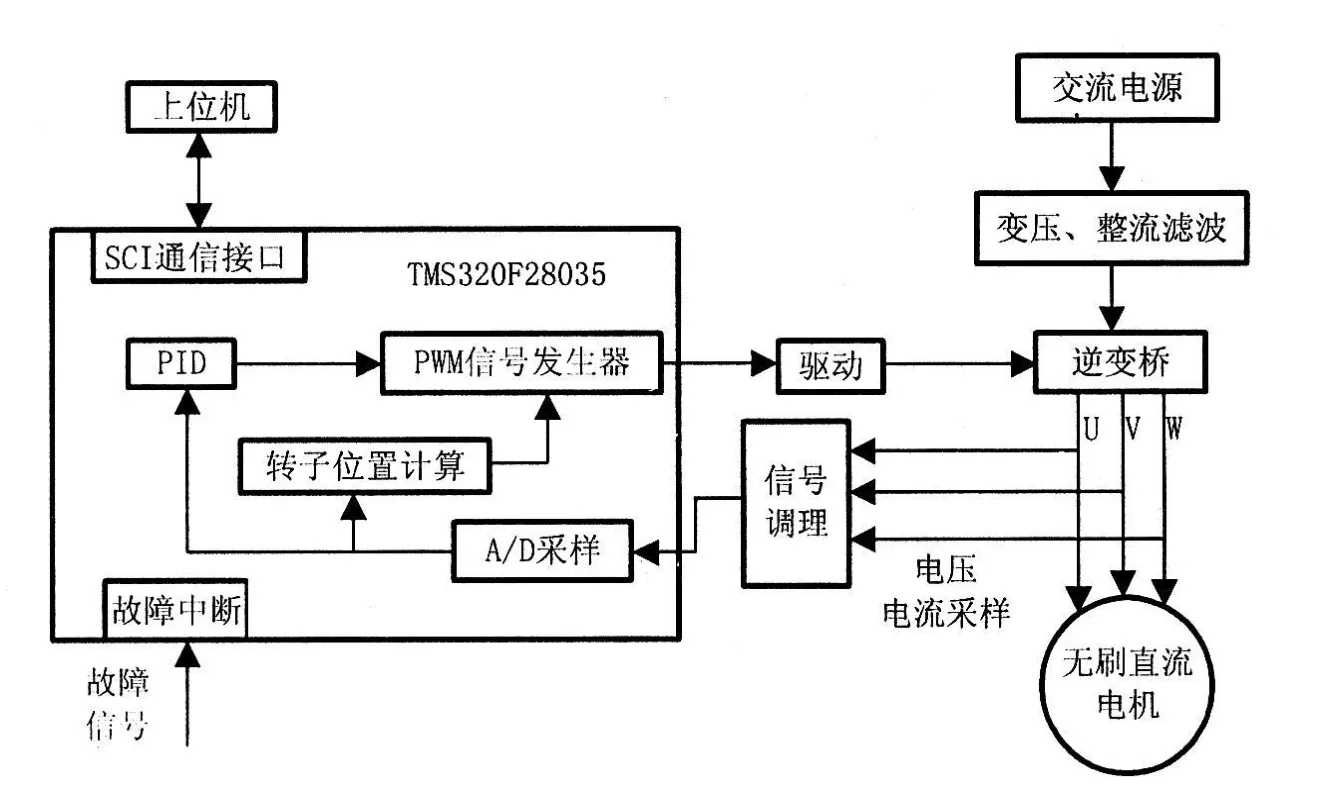
图2 系统结构图
本文采用基于反电势IIR滤波的DSP控制器来对无位置传感器BLDC进行控制。BLDC参数为:额定电压24V,极对数4极,额定转矩0.4N·m,额定转速4 000 r/m in。图3为实测的BLDCM反电势在滤波前和滤波后的图形。从图3结果中可以看出,使用IIR滤波器可以可靠地滤除高频干扰,由滤波后得到的反电势过零点以及相位补偿值可以准确的获得换相信号,具有较好的实用性。
4 结束语
本文针对无位置传感器BLDC的反电势过零点检测进行了研究,采用IIR滤波器滤除反电势信号中存在的噪声,滤除由噪声干扰产生的虚假过零点,获得正确的反电势过零点信息,完成无位置传感器BLDC的准确换相。实验结果证明,该方法可以有效滤除反电势虚假过零点,实现无位置传感器无刷直流电动机的可靠、平稳运行。
[1]曹少泳,程小华.无刷直流电机无位置传感器的转子位置检测方法综述[J].防爆电机,2007,42(1):35-39.
[2]彭国富,周洪,但伟.一种基于混合数字滤波器的过零检测技术[J].微计算机信息(测控自动化),2008,24(4):274-276.
[3]OlliVainio,Seppo JOvaska.Noise Reduction in Zero Crossing Detection by Predictive DirtalFiltering[J].IEEETransactions on,1995,42(1):58-62.
[4]Texax Instruments Company.TMS320F2803x(Piccolo?)MCUs datasheet[EB/OL].http://focus.ti.com/docs,2009-10-25.
[5]Texax Instruments Company.TMS320x2803x Piccolo Control Law Accelerator(CLA)Reference Guide(Rev.A)[EB/OL].http://focus.ti.com/docs,2009-10-25.
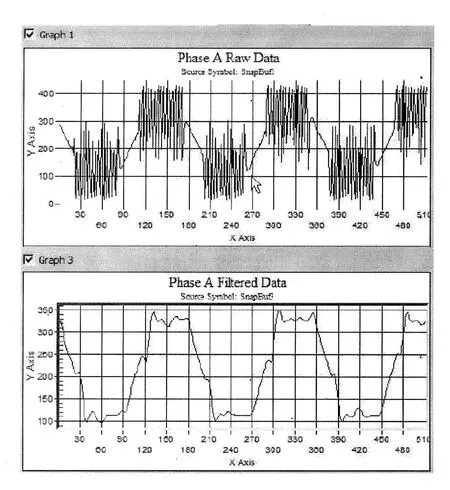
图3 实测的反电势滤波前后波形图
The IIR Filter for Back-EMF of Brushless DC Motor and DSP Implement KOU Zhi-guo
(School of Electronics Information,Hangzhou Dianzi University,Hangzhou Zhejiang310018,China)
Brushless DCmotor controlkey is to obtain rotor position information,but traditional back-EMF detection is difficult to compensate the phase delay in thehigh-frequency interference filter.this paper describesa technicalof IIR digital filter for back-EMF signalusing DSP,which can eliminate thenoise effect through back-EMF signal and identify the zero-crosseventaccurately.Theexperimentalresultwell demonstrates thatthe adopted controlmethod can filter out interference of high frequency effectively,acquire the back-EMF zero-crossing accurately and provides desirable reliability,flexible and practicability.
brushless DCmotor;back-EMF zero-crossing detection;digital filter;phase delay
TM 383.6
A
1001-9146(2010)05-0049-04
2010-07-20
寇治国(1980-),男,辽宁朝阳人,在读研究生,新型电子器件研究与应用.
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
防爆电机(2020年4期)2020-12-14 03:11:02
数理化解题研究(2020年13期)2020-05-07 03:29:02
数学物理学报(2019年5期)2019-11-29 07:46:30
电子制作(2017年1期)2017-05-17 03:54:12
高中生·天天向上(2016年9期)2016-11-22 09:10:34
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
新高考·高一物理(2012年5期)2012-04-29 20:27:57
物理与工程(2010年5期)2010-03-25 10:02:31
