
基于机器视觉的LED阵列自动分选系统设计
2010-01-08 07:28:34朱子伟
杭州电子科技大学学报(自然科学版) 2010年5期
鲁 波,黄 坚,朱子伟
(浙江省电子技术研究所有限公司,浙江杭州310012)
基于机器视觉的LED阵列自动分选系统设计
鲁 波,黄 坚,朱子伟
(浙江省电子技术研究所有限公司,浙江杭州310012)
该文针对LED照明产品的特征,设计一台基于机器视觉的LED阵列自动分选系统。系统利用数字图像处理技术对发光LED阵列进行识别、亮度分析和数量统计,实现对产品发光质量的检测及自动分选。PC软件完成测量控制功能,简化硬件结构,降低成本。用户可根据不同测量对象配备相应的滤镜和设置检测精度、曝光时间等采集参数,提高了系统的可移植性和维护性。
机器视觉;发光二级管;细化
0 引 言
发光二级管(Light Emitting Diode,LED)因其体积小、寿命长、可靠性高等优点,已广泛用于交通、医学和室内等照明领域。伴随着LED在照明领域的迅速发展,对LED阵列发光质量的检测是照明生产中一项重要的任务。因进口设备的成本较高,对国内小型LED阵列生产商来说,多采用人工目测法进行亮度等级分选。这种依靠人眼辨别亮度的方法受人为因素影响大,测量精度不高,生产效率低。而对于在监控和医用等领域所用的红外LED,人眼又无法感知[1]。本文以机器视觉技术为基础设计开发了LED阵列自动分选系统。
1 系统结构设计
1.1 系统构成及工作原理
系统由视觉检测平台、上位机测控软件和分选机构3部分组成,如图1所示。位置传感器检测到LED阵列后输出信号到核心控制器。控制器输出两路信号,一路到检测台,控制其暂停以点亮LED阵列;另一路触发摄像机拍摄一帧图像。所拍图像经USB总线传输到PC机。PC机测控软件对图像进行处理、识别、显示及灰度分析等操作。当有LED灰度不满足精度要求时,摄像机则输出信号给核心控制器,由核心控制器控制检测台对不合格品进行分选[2]。
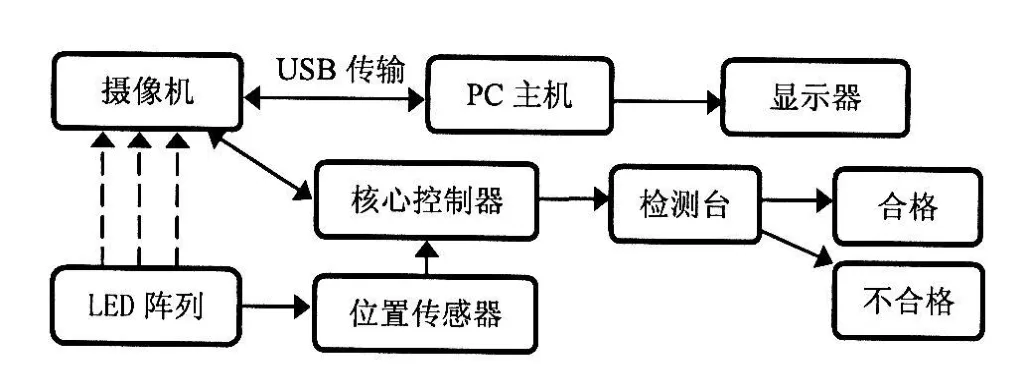
图1 系统工作原理图
1.2 视觉检测平台和分选机构
视觉检测平台由工业摄像机、光学镜头和减光镜组成。因不同LED阵列样式及亮度各不相同,检测时需对像机的曝光时间和镜头光圈及焦距进行调整。选择价格较低的USB接口国产百万像素黑白CMOS摄像机。镜头选用M0814-MP工业镜头。LED阵列为自发光物体,为了提高采集图像对比度,在镜头前加减光镜,以均匀衰减光强。考虑到机械设计的复杂性和用户要求各异等原因,将机械设计部分委托制造机械设备的公司来设计。系统在测量到不合格品时,自动输出一路控制信号。这样在系统集成上降低成本,缩短开发周期,方便维护。
2 软件设计
2.1 上位机测控软件总体设计
系统的测量控制由上位机软件完成。软件采用M icrosoft Visual C++6.0开发设计。主要功能模块为摄像机初始化及参数设置,图像采集、处理及分析,结果显示及保存,产品数量统计,检测精度设置等[3]。上位机测控软件总体功能模块和结构如图2所示,检测流程如图3所示。
2.2 LED阵列图像识别算法设计
本系统是对通电LED阵列进行图像采集,因此可把采集的每个LED图像看作圆形颗粒。通过分析颗粒数量和灰度来判断阵列发光质量。对颗粒识别算法原理如下:首先对图像进行均值滤波、阈值分割、二值化处理。然后对图像进行细化来提取颗粒的中心点和计算其半径。为了抑制照明不均匀,阈值分割采用自适应阈值化法。将图像分成4个区域,根据直方图分别求取每个子区域的最佳阈值[4]。算法如下:
(1)选择一个初始阈值的估算值T=(max+min)/2,其中max为最大灰度值,min为最小灰度值;
(2)利用阈值T把图像分割成两组,R1和R2;
(3)计算区域R1和R2的均值μ1,μ2;
(4)选择新的阈值T;

(5)重复2-4步,直到μ1和μ2的均值不再变化或迭代次数大于100。
图像细化是从原图中去掉一些点,但仍保持原图的骨架。LED光斑图像为圆形,细化则是提取圆心。细化处理过程算法分3步[5]:
(1)生成边界。假如一个被标志点的4方向邻近点有任何一个点未被标志,则此点为边界点。为了边界生成准确,系统中循环使用4方向和8方向;
(2)如果被标志点的连通区域中有任何一个非边界点,则去掉边界;否则将所有边界点标志为临时中心点;
(3)重复(1)(2)两步,直到所有点都被访问。
将所有临时中心点且连通的象素坐标平均值作为最终圆心点。因颗粒为圆形,根据细化次数得到颗粒光斑半径。
3 实验及结果分析
系统对常用3种波段LED样品进行实验,样品工作电压12v,镜头光圈4档,加ND090和ND120减光镜。标准品测量结果如表1所示。其中一组近红外LED阵列测量如图4所示。图4(b)中位置标号为35的LED不亮,位置坐标为(217,361)。从表1看出,近红外样品的LED计数误差偏大,原因是样品中单点LED密集且样品位置偏离采集中心时算法会有误判。因此系统在自适应性方面仍需进一步改进。图像处理时间均小于200ms,有效提高检测效率。
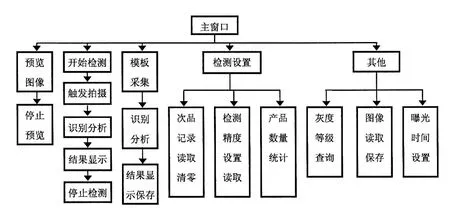
图2 上位机测控软件总体功能模块框图
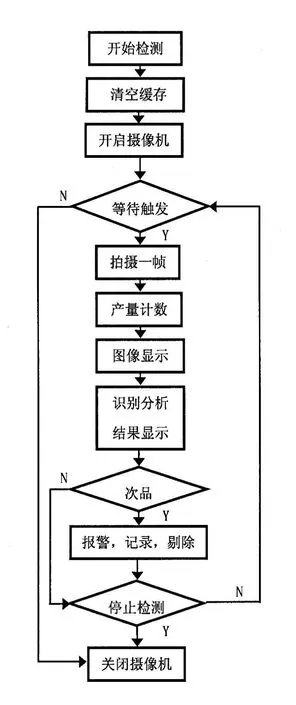
图3 图像检测分析流程图
4 结束语
本系统具有可移植性,通过对软件参数设置和镜头、滤镜的调整,可对不同型号LED阵列点亮质量进行检测。系统可根据客户要求定做,在各种LED灯具的成品和半成品检测中,取代人工目测工序,有助于提高产品质量,具有很好的市场应用价值。

表1 3种常用LED阵列标准样品参数测量表
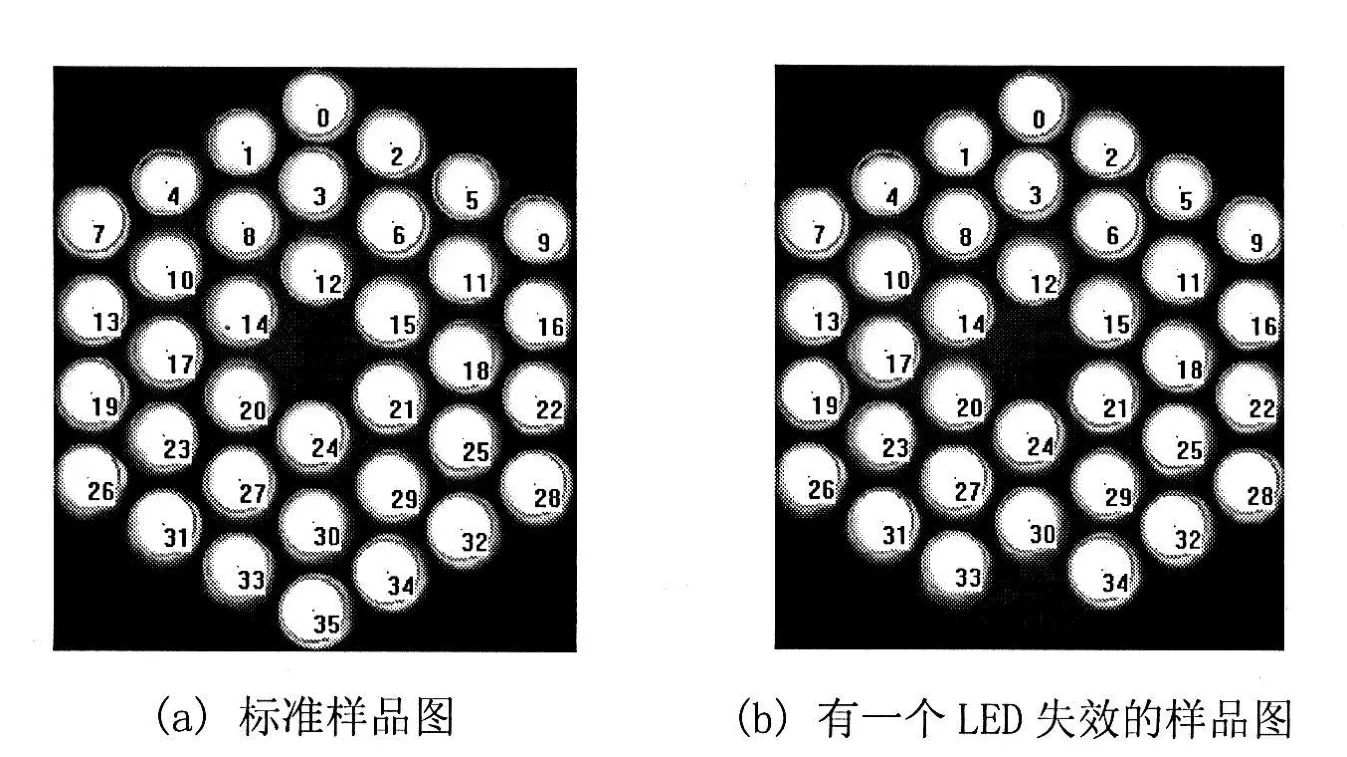
图4 近红外样品LED阵列测量图
[1]沈天行,刘海静.用图像数字化处理技术测试LED的光参数[J].光学技术,2004,30(6):660-664.
[2]秦岚,吕云日,邓维礼.LED多参数检测系统的设计与控制[J].电子技术应用,2008,34(7):79-81.
[3]求是科技.Visual C++6.0程序设计从入门到精通[M].北京:人民邮电出版社,2006:207-229.
[4]贾云得.机器视觉[M].北京:科学出版社,2002:40-44.
[5]王占全,徐慧.精通Visual C++数字图像处理技术与工程案例[M].北京:人民邮电出版社,2009:190-220.
Design of LED Array Automatic Sorting System Based on the Machine Vision LU Bo,HUANG Jian,ZHU Zi-wei
(Zhejiang Research Institute of Electronic Technology Co.,LTD,Hangzhou Zhejiang310012,China)
A LED array automatic sorting system was designed in terms of LED lamp properties.The system can measure the quality of LED arrays and sort them automatically using thedigital image processing to recognize them,analyze brightness and count them.In order to simplify hardware and reduce costs,measurement and controlwere performed by PC software.Users can fit filters and setparameters such as precision and exposure time according to differentsamples,whichmakes the system moreportable and easy tomaintain.
machine vision;light emitting diode;thinning
TN401
A
1001-9146(2010)05-0029-04
2010-07-20
鲁波(1980-),女,黑龙江泰来人,工程师,测试计量技术及仪器仪表.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
英语文摘(2021年10期)2021-11-22 08:02:26
高技术通讯(2021年3期)2021-06-09 06:57:48
制造技术与机床(2019年9期)2019-09-10 07:36:54
摄影之友(影像视觉)(2019年3期)2019-03-30 01:36:58
西南交通大学学报(2018年6期)2018-12-18 02:22:28
河北遥感(2017年2期)2017-08-07 14:49:00
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
衡阳师范学院学报(2016年3期)2016-07-10 07:16:27
