新款汽车后视镜自动调节装置的研发
2010-01-07 11:23何雍奥张卫波
海峡科学 2010年12期
何雍奥 张卫波
新款汽车后视镜自动调节装置的研发
何雍奥 张卫波
福州大学机械学院
本文介绍了一种新研发的汽车后视镜调节装置,它采用了单片机控制直流电机以调节后视镜的位置。它通过加强和改进现有汽车的后视镜系统,克服了现有后视镜普遍存在的死角和盲区的问题,得以更好地实现汽车的人性化和自动化,并提高了行车的安全性。本文将系统、全面地介绍这款新型汽车后视镜调节装置的工作原理与应用前景。
后视镜;控制系统;主动安全技术;零部件
汽车后视镜俗称倒车镜,是汽车主动安全装置,是驾驶员坐在驾驶室座位上直接获取汽车后方、侧方和下方等外部信息的工具。但目前各种轿车安装的后视镜大多都不同程度地存在盲区,而且视野宽度不足,始终存在着影响行车安全的隐患。随着汽车产品市场观念的不断更新和变化,市场对轿车后视镜安全性、操作方便性、经久耐用性及豪华美观性等方面提出了更高的要求。特别是汽车电子技术的发展,给后视镜产品的功能升级带来了更大的空间,也促使了这一类操纵简单,安装便捷,价格低廉的汽车后视镜自动调节装置的问世。
1 汽车后视镜自动调节装置综述
汽车后视镜自动调节装置是一种利用微处理技术设计出的数字化智能控制器,它与原车转向指示开关、倒车开关、电动后视镜相结合,既保留了原汽车后视镜的正常调节功能,又新增了后视镜在车辆转弯,车辆变道,车辆倒车时的智能转动功能。
1.1 后视镜自动调节装置实现的功用
汽车前行左转时:开启左转向灯指示开关时车辆左侧后视镜水平向外转动,关闭指示灯时左侧后视镜自动水平向内运动,直至返回到原来正常位置
汽车前行右转时:开启右转向灯指示开关时车辆右侧后视镜水平向外转动,关闭指示灯时右侧后视镜自动水平向内运动,直至返回到原来正常位置;
汽车倒车时:当操纵杆位于倒档档位时,左右后视镜自动下摆3~10度,使视野扩大到可以看到车身腰线以下及后轮附近的路面状况。倒车结束或驻车后,左右后视镜自动回复至正常位置。
1.2 后视镜自动调节装置解决的问题
这种装置完全消除传统后视系统存在的空间盲点、时差盲点、视觉暂留盲点和视觉误差,使驾驶员无需“左顾右盼”,也无需“瞻前顾后”,只需正视前方就可以看清左右前后的车况和路况,并能准确的判断其他车辆和物体与本车之间的相对距离和相对车速,正确指引驾驶员操作,可消除因盲点和视差造成的车祸。同时它也具备安全导航功能,使驾驶员通过对后视镜的观察可以准确地判断转弯或变换车道是否安全,准确地看清后方的路况和车况而安全地驾驶,从而实现后视镜的无盲区,无死角。
2 汽车后视镜自动调节设计
电动后视镜的背后都装有两套电动机和驱动器(减速齿轮和离合器),可操纵其上下及左右运动。通常垂直方向的运动由一个电动机控制,水平方向倾斜运动由另一个电动机操纵。且电动机都为永磁型的。后视镜以枢轴为中心,通过两个微型电动机工作使后视镜上下或左右方向进行位置调整。本设计则主要通过电路控制电机工作改变后视镜角度。
2.1 电路原理
如图1电路功能框图所示,电位器将后视镜的位置信号转换成电压信号,接着后视镜位置信号采集电路将后视镜位置信号传给单片机,单片机经过A/D转换,运算处理后,将控制信号送给电机正、反转及驱动电路来控制电机运转,然后电机带动后视镜运动到相应位置。
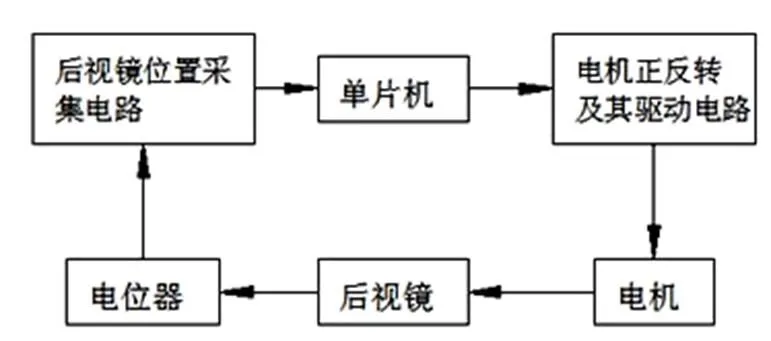
图1 基本后视镜控制电路
2.2 电机驱动电路设计
图2所示为单片机控制的一个桥式电路驱动后视镜的一个电机正、反转的原理图。它由2个NPN和2个PNP组成桥式电路,电阻5、6、7、8、9、10通过适当的选值,使NPN与PNP在工作时处于饱和状态,即作为开关来使用。当QB1、QB10导通时,电机M2正转,当QB2、QB9通时,电机M2反转,从而实现电机的正反转。而QB1、QB2、QB9、QB10的导通和截止则由Cmir1、Cmir2、Cmir3、Cmir4端的电平决定,Cmir1、Cmir2、Cmir3、Cmir4分别接到单片机的PTA0、PTA1、PTA2、PTA3引脚,及单片机通过这4个引脚实现对电机正反转的控制。
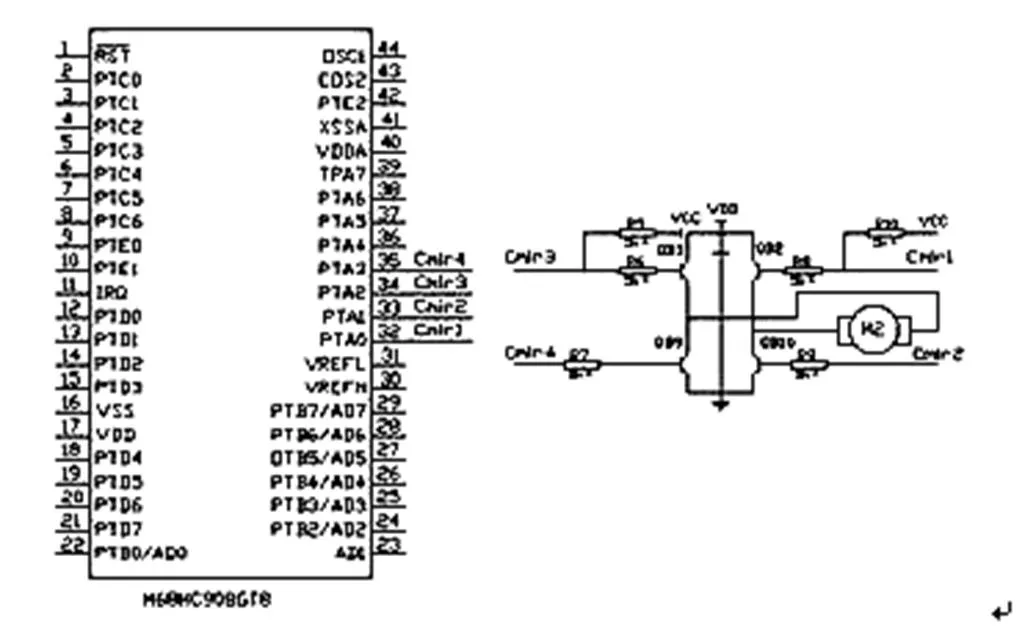
图2 桥式电路驱动后视镜点击原理图
控制电动后视镜的工作,其实就是分别控制安装在左右2个后视镜的4个直流电动机的正反转。为了结构简单起见,就要求控制电路能够实现电流的双向导通,所以在电动机控制电路中,要用到双电源法和桥式电路法,这样就可以通过改变电动机两端的电势差来控制直流电动机的正反转,起到线路优化的作用。
2.3 控制电路的设计
图3所示为基本后视镜控制电路,各种汽车上所使用的电动后视镜都是在这种基本控制电路的基础上加以扩展、改进、组合而得到的。电动后视镜的背后都装有两套电动机和驱动器(减速齿轮和离合器),可操纵其上下及左右运动。通常垂直方向的运动由一个电动机控制,水平方向倾斜运动由另一个电动机操纵。且电动机都为永磁型的。后视镜以枢轴为中心,通过2个微型电动机工作使后视镜上下或左右方向进行位置调整。
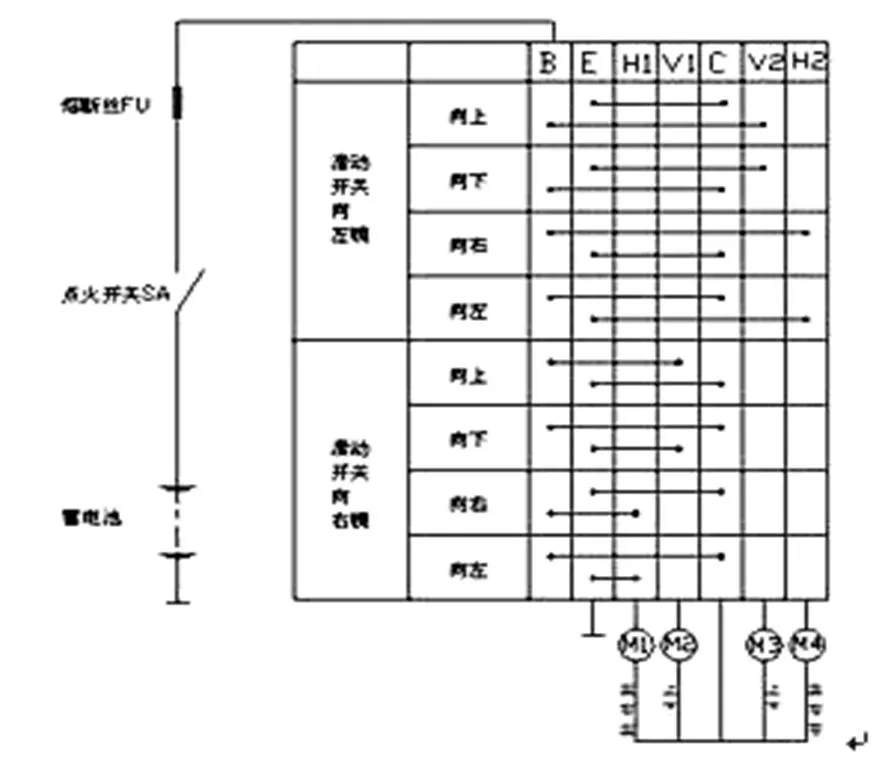
图3 基本后视镜控制电路
当安装此后视镜自动调节装置后,位于转向指示开关、倒车档位处的传感器将信号通过电路传至此处,来完成最后的后视镜转动,具体电流通路如下所示:
2.3.1右后视镜向上摆动
蓄电池正级→点火开关SA→熔断丝FU→按钮开关接线柱B→右镜开关内闭合的向上触点→按钮开关V2接线柱→ M3电动机的上端→M3电动机→开关C接线柱端→右镜开关内闭合的触点→开关 E接线柱端→搭铁→蓄电池负极
该电流通路,使M3电动机中有从上向下的电流流过,电动机启动运转,产生的转矩带动右侧后视镜向上摆动。
2.3.2右后视镜向下摆动
蓄电池正级→点火开关SA→熔断丝FU→按钮开关接线柱B→右镜开关内闭合的向下触点→按钮开关C接线柱→M3电动机的下端→M3电动机→开关V2接线柱端→右镜开关内闭合的另一组向下触点→开关E接线柱端→搭铁→蓄电池负极
该电流通路,使M3电动机中有从下向上的电流流过,电动机启动运转,产生的转矩带动右侧后视镜向下摆动。
2.3.3右后视镜向左摆动
蓄电池正级→点火开关SA→熔断丝FU→按钮开关接线柱E→右镜开关内闭合的向左触点→按钮开关H2接线柱→M4电动机的左端→M4电动机→开关C接线柱端→右镜开关内闭合的触点→开关 B接线柱端→搭铁→蓄电池负极
该电流通路,使M4电动机中有从左向右的电流流过,电动机启动运转,产生的转矩带动右侧后视镜向左摆动。
2.3.4右后视镜向右摆动
蓄电池正级→点火开关SA→熔断丝FU→按钮开关接线柱E→右镜开关内闭合的向右触点→按钮开关C接线柱→M4电动机的右端→M4电动机→开关H2接线柱端→右镜开关内闭合的另一组向下触点→开关B接线柱端→搭铁→蓄电池负极
该电流通路,使M4电动机中有从右向左的电流流过,电动机启动运转,产生的转矩带动右侧后视镜向右摆动。
2.3.5左后视镜向上摆动
蓄电池正级→点火开关SA→熔断丝FU→按钮开关接线柱E→左镜开关内闭合的向上触点→按钮开关C接线柱→M2电动机的下端→M2电动机→开关V1接线柱端→右镜开关内闭合的触点→开关 B接线柱端→搭铁→蓄电池负极
该电流通路,使M2电动机中有从下向上的电流流过,电动机启动运转,产生的转矩带动左侧后视镜向上摆动。
2.3.6左后视镜向下摆动
蓄电池正级→点火开关SA→熔断丝FU→按钮开关接线柱E→左镜开关内闭合的向下触点→按钮开V1接线柱→M2电动机的上端→M2电动机→开关C接线柱端→左镜开关内闭合的另一组向下触点→开关B接线柱端→搭铁→蓄电池负极
该电流通路,使M2电动机中有从上向下的电流流过,电动机启动运转,产生的转矩带动右侧后视镜向下摆动。
2.3.7左后视镜向左摆动
蓄电池正级→点火开SA→熔断丝FU→按钮开关接线柱E→左镜开关内闭合的向左触点→按钮开关H1接线柱→M1电动机的左端→M1电动机→开关C接线柱端→右镜开关内闭合的触点→开关B接线柱端→搭铁→蓄电池负极
该电流通路,使M1电动机中有从左向右的电流流过,电动机启动运转,产生的转矩带动右侧后视镜向左摆动。
2.3.8左后视镜向右摆动
蓄电池正级→点火开关SA→熔断丝FU→按钮开关接线柱B→左镜开关内闭合的向右触点→按钮开关H1
接线柱→M1电动机的右端→M1电动机→开关C接线柱端→右镜开关内闭合的另一组向下触点→开关E接线柱端→搭铁→蓄电池负极
该电流通路,使M1电动机中有从右向左的电流流过,电动机启动运转,产生的转矩带动右侧后视镜向右摆动。
3 结语
本文介绍了一种采用单片机MC68HC908控制器的新开发的汽车后视镜自动调节装置电控系统的工作原理和工作用途,这种可在不影响现有车辆的后视镜功能及车辆外观的前提下消除了原有后视镜存在的盲区和死角的问题,而且不会改变驾驶员的操作习惯的控制器安装简易,价格低廉,便于推广、利用,就用广阔的应用前景。
[1] 赵福堂. 汽车电器与电子设备[M]. 北京理工大学出版社, 2009.
[2] 胡汉才. 单片机原理及其接口技术[M]. 清华大学出版社,2004.
[3] 王积伟,吴振顺.《控制工程基础》高等教育出版社,2001.
[4] 曹志婉. 电动后视镜[J]. 汽车电器,2004(04).
[5] 徐红光,范钦满, 王庆安. 现代汽车后视镜的综合分析[J]. 2002(11).
[6] 徐本财,鲍宇.轿车智能电动后视镜开关及控制线路优化设计[J].黑龙江交通科技, 2008(11).
[7] 陈钊毅. 汽车后视镜的视野分析[J]. 2007(12).
New Car Rearview Mirror Automatic Adjustment Device
He Yongao,Zhang Weibo
(College of Mechanical Engineering and Automation,FuZhou University, FuZhou 350108, China)
This article is about a new type of adjustment device for automobile rearview mirrors, which adjusts the positions of rearview mirrors by using MCU-controlled DC motors. By improving the existing rearview mirror systems on automobiles, the adjustment device has solved the common problems of the blind corner and the dead zone, thus realizing the humanization and automation on automobiles, and improves the safety status when driving. In this article, the operating priciples and possible applications in the future of this adjustment device for automobile rearview mirrors will be systematically and fully introduced.
Rearview mirror; Control system; Active safety technology; Component
猜你喜欢
武汉广播影视(2022年6期)2022-12-28
军民两用技术与产品(2020年8期)2020-09-07
山东工业技术(2019年13期)2019-05-30
中国新闻周刊(2017年21期)2017-06-15
汽车零部件(2015年8期)2015-06-23
汽车科技(2015年1期)2015-02-28
客车技术与研究(2014年6期)2014-02-28
中国设备工程(2012年8期)2012-05-04
电工技术学报(2011年1期)2011-02-19
物理教学探讨(2009年4期)2009-05-25