汽车试验中车速信号的测量方法
2010-01-07 11:23:16戴村供
海峡科学 2010年12期
戴村供
汽车试验中车速信号的测量方法
戴村供
福建工程学院机电及自动化工程系
介绍了汽车试验中常见的几种车速测量方法,比较了各自的优缺点,并对当今较为先进GPS测量车速方法的工作原理做了较详细的介绍。
车速测量;GPS;第五轮仪
车速信号是汽车制造厂家、科研院所和高校进行汽车性能检测、道路试验及科学研究时常测量的重要参数之一。它与车轮力(力矩) 、踏板力、车轮转速(转角)等参数相结合,对汽车整车动态性能的分析、制动系统的性能匹配等有着重要的意义和应用价值[1]。
1 传统测速方法
目前,在汽车试验上采用的速度测量系统主要分为第五轮仪和相对式光电编码器。
第五轮仪有两种:一种是常规的接触式第五轮仪,它的测距传感器由外周长设定的测量轮(第五轮) 和电脉冲发生器两部分组成。测量轮每转动一个角度,脉冲发生器就产生一个电脉冲信号,这个角度大小与测量轮的滚动周长相对应,保证测量轮每行驶一定距离(一般为0. 01 m),脉冲发生器就输出一个脉冲信号。计算机对这些脉冲进行计算,得到距离值。仪器内部高精度的晶振通过分频电路得到基本时间脉冲信号,对这些时间脉冲的采样、计数就是第五轮仪的时基。接触式第五轮仪给出的速度量是仪器计算系统对上述两种脉冲同步采样、计算得到的计算量。如图1所示。
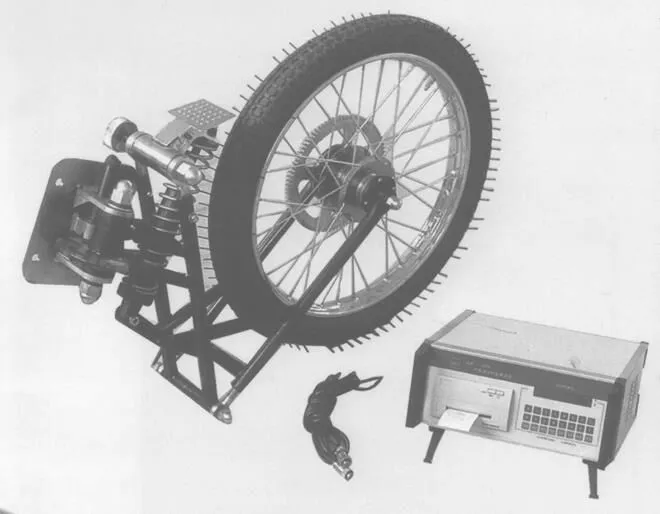
图1 接触式第五轮仪
另一种是光电式非接触式第五轮仪,利用光学原理测量出车辆与地面的相对移动距离信号。车辆行驶时,非接触式第五轮仪光源发出的光垂直照射地面,空间滤光片传感器接受地面反射来的光信号,把其转换为电信号输送到主机,并进行数据转换与处理,得到速度电压模拟量输入车辆数据采集及处理系统。由车辆数据采集及处理系统把速度电压模拟量转换为速度电压数字量,并把结果保存为二进制文件。如图2所示。
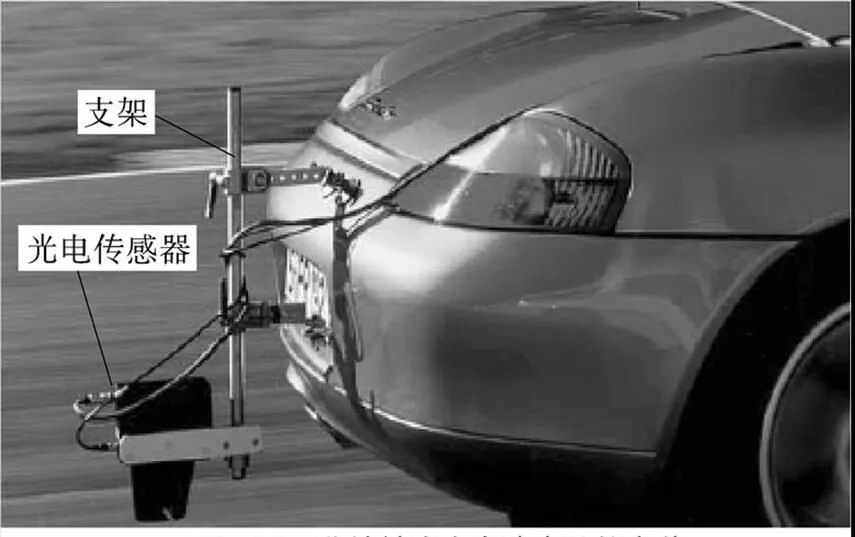
图2 非接触式第五轮仪
光电式编码器使用测周法或测频法,通过测量相连脉冲的间隔时间或单位时间内的脉冲数转换算出车速,但路况和安装不当会使编码器在行使过程中产生抖动,影响测量精度。
2 GPS-RTK测速方法
2.1 GPS简介
GPS全称为全球定位系统(global positioning system),是美国国防部自20世纪60年代起花了20年时间、耗费100亿美元研制开发成功的,它利用人造卫星跟踪、监控既定目标,从而达到及时防御、救援的目的。该系统最初仅应用于军事领域,20世纪90年代以来,随着技术的不断成熟,GPS先在民航飞机、远航轮船等领域得到广泛使用,继而深入到国民经济和社会生活的各个方面。GPS是一个基于卫星的导航、定位及计时的系统。接受器通过(GPS)卫星发送的数据计算二维(经度、纬度)或三维(经度、纬度、高度)位置。在军事领域中,GPS单独使用时其圆周率精度约12 m,当基站与一起使用时,差分GPS的精度可提高到2 m~5 m。民用GPS采用CA码,在引入人为选择可用性SA误差后精度约为100 m,差分GPS可将精度提高到约10 m[3]。近年来,随着全球定位系统(GPS)技术的快速发展,RTK(Real Time Kinematics)测量技术也日益成熟,RTK测量技术因其精度高、实时性和高效性,使得其在工程中的应用越来越广。比如NovAtel公司最新推出的第三代GPS 接收机作为基准站和移动站接收机,它是一种高精度GPS 接收机,在RTK 差分模式下,定位精度可达到0.01 m,速度精度为0.03 m/s[5]。GPS -700 天线采用了NovAtel的风火轮技术( Pinwheel),是目前世界上唯一不需要外置扼流圈的零相位中心天线,能在恶劣自然环境中实现高精度定位。
3.2 GPS相对定位原理
GPS 相对定位是通过使用高性能的卫星接收器,利用位置已知的卫星( ≥4 个) 的坐标来确定一个被测目标的坐标(),通过地面接收机接收GPS卫星系统发来的星历参量和导航电文,根据卫星所发射的无线电波信号的传播延时,可以测定卫星信号到达接收机的时间⊿,利用高等解析几何来构造模型,建立三维位置量和一个时间量的方程,测量各卫星与目标位置的距离,利用这些计算结果,接受器通过三角定位求出卫星和接收机之间的距离,进而可确定接收器在地面上的位置[2]。如图3所示,假设时刻在地面待测点上安置GPS接收机,可以测定GPS信号到达接收机的时间△,再加上接收机所接收到的卫星星历等其它数据可以确定以下4个方程式:

图3 GPS 相对定位原理图
式中为待测点坐标的空间直角坐标。
xyz(=1、2、3、4) 分别为卫星1、卫星2、卫星3卫4在t时刻的空间直角坐标,由卫星导航电文求得。Vt(=12、3、4) 分别为卫星1、卫星2、卫星3、卫星4的卫星钟的钟差,由卫星星历提供。o为接收机的钟差。
d=△t(=1、2、3、4)。
d(=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4到接收机之间的距离。
△t(=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4的信号到达接收机所经历的时间。
为GPS信号的传播速度(即光速)。
由以上4个方程即可解算出待测点的坐标和接收机的钟差o。
2.3 实时动态差分(RTK)定位技术
实时动态差分(RTK) 定位技术是GPS 测量技术与数据传输技术的结合,是GPS 测量技术中的一个新突破。RTK定位是以载波相位观测量为根据的实时差分GPS 测量技术,其基本思想是:两台GPS接收机一台设为静态基准站,一台设为动态移动站(用户观测站),在基准站上GPS 接收机,对所有可见GPS 卫星进行连续地观测,并将其观测数据通过无线电传输设备,实时地发送给动态移动站(用户观测站)。在用户站上,GPS 接收机在接收GPS卫星信号的同时,通过无线电接收设备,接收基准站传输的观测数据,然后根据相对定位原理,在系统内将这些信号合成为差分观测值进行实时处理,实时地解算整周模糊度未知数并计算显示用户站的三维坐标及其精度。此方法可以消除多项测量误差,从而得到较为精确的动态待测点位置信息,实时给出精度达厘米级的点定位坐标[6]。随着美国对民用卫星定位精度的进一步放开及RTK 技术的不断发展, GPS 测量精度越来越高,使得用来获取高精度汽车状态信息成为可能[5-6]。
2.4 测速方法
GPS-RTK动态相对定位是将一台GPS 接收机架设在固定的参考点作为基准站,另一台GPS 接收机(移动站) 架设在被测目标上,两台接收机同步观测相同的卫星,以确定被测目标相对参考点的位置。实地测定车速时,将GPS 基准站架设在无遮蔽的高地上,把移动站架设在实验车上,就可以测得目标车的运动速度。GPS 采集车速可以分为跟车法和实验车法。这两种方法都是用安装在实验车顶部的GPS 移动站,记录车辆行驶过程中卫星的原始星历文件,与基准站数据相参照解算出实验车的行驶轨迹,从而求解车速。二者的差别在于,跟车法是在选定路段上驾驶实验车对符合观测标准的车辆进行跟踪测量,GPS 移动站所记录的数据是实验车的动态位置[4]。由于实验车是在跟踪前方被测车辆,所以数据能间接反应被测车辆的行驶状态;实验车法是选定若干名驾驶员,由这些驾驶员分别驾驶实验车在选定路段上以自己习惯的方式自由驾车,故移动站记录的数据即为被测车辆(也即是实验车本身) 的真实值。
GPS 的定位精度受多种因素的限制,主要因素是电离层的天气状况造成的信号延迟及从附近建筑物和地面反射造成的延迟。在手持式娱乐用GPS 接收器中,速度每秒钟测量一次,通过现在的位置值减去之前的位置值来计算。这种计算方法受以上误差的影响,结果不适合于需要高精度的数据分析。目前,比较先进的GPS 定位测量系统使用多普勒变换转换从每颗卫星来的载波信号,一个雷达枪用来计算速度[2]。这样,载波频率就不会受到电离层和反射的影响,最终速度的精度能达到1 cm/ s,这种技术使GPS 成为测量移动车辆速度精度最高的方法之一。
在测试中,只要汽车所在位置的坐标值能准确确定,即汽车行驶轨迹中每个点的坐标值确定了,那么包括速度、加速度、制动距离、里程以及与汽车行驶有关的其它状态信息也就随之确定[5]。
4 几种测速方法的比较
车速测量系统的好坏主要取决于其测量精度和不同路面的适用性。
接触式第五轮仪价格较低,在低、中速范围尚能满足一般测试需要,其缺点是轮圈直径有误差。另外,在速度较高时,路面稍许不平会出现一定的跳跃现象,因为车辆颠簸造成的“卷起”使第五轮滚回去然后停下来,使测量时间比其他传感器记录的长一些,从而带来测量误差。如果路面不平度增大,其误差会变得更大。此外,第五轮仪需要支架固定,安装非常不便。现在不多使用。
光电式非接触式第五轮仪价格比接触式第五轮仪高一些,但精度也有明显提高。但在潮湿的低附着系数路面上测量时非常容易出现信号丢失现象,这是由于光电式非接触第五轮仪是靠内部的空间滤光片传感器接受地面反射来的光来进行信号采集,而湿的低附着系数路面无法实现光线的良好反射,导致信号丢失、仪器失效。
GPS车速测试系统,体积小,携带、安装方便,而且安装后即可进行工作,不需要进行繁杂的调试,测量不受路面情况限制,但价格昂贵。另外,由于是靠卫星来定位,可以进行侧向、垂向运动和空间位置的测量,这是其显著优点。其缺点是当车辆穿行在城市高楼区、立交桥、林荫道和隧道等处时,常出现卫星信号遮挡问题,随着GPS 定位技术的不断提高、通信卫星的免费使用,加上数据采集的方便性,该类测试系统逐渐成为车辆性能测试的主要设备[2]。
[1] 陆晶晶, 等. 基于GPS和加速度计的车速测量系统的开发与研制[J]. 测控技术, 2007, 26(8).
[2] 张利鹏,等. 几种车速测量装置的工作原理与性能比较[J]. 公路与汽运, 2008(2).
[3] 徐哲, 等. GPS在汽车运输中的应用[J]. 交通企业管理, 2006(8).
[4] 黄天. GPS 在车速采集中的应用方法[J].湖南理工学院学报:自然科学版, 2005 , 18(1).
[5] 杨春生, 等. 基于RTK-GPS的汽车行驶记录仪检测系统[J].汽车技术, 2007(10).
[6] 杨春生, 等. 基于GPS -RTK 技术的汽车运动稳定性检测系统[J].四川大学学报:工程科学版.
The Measurement Method of Vehicle Speed in Vehicle Testing
Dai Cungong
(Electromechanical and Automation Engineering Department, Fujian University of Technology, Fuzhou 350108, China)
The common measurement methods of vehicle speed in the vehicle testing were introduced. The advantages and disadvantages of the measurement methods were compared. The modern speed measurement method based on global positioning system (GPS) was focused.
vehicle speed measurement; global positioning system (GPS);the fifth wheel
福建省教育厅项目(JA08166),福建省科技平台建设项目(2008J1002)。
猜你喜欢
军民两用技术与产品(2021年10期)2021-11-25 14:17:57
科学家(2019年3期)2019-08-18 09:47:43
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
汽车维护与修理(2018年1期)2018-04-04 01:13:22
电子制作(2016年1期)2016-11-07 08:42:41
科学与财富(2016年28期)2016-10-14 22:02:34
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33