
利用Retinex 消除在彩红外遥感影像 聚类中阴影的研究
2010-01-01 01:47王子武李敬仕方国涛
图学学报 2010年1期
王子武, 李敬仕, 吴 静, 方国涛
(安徽邮电职业技术学院通信工程系,安徽 合肥 230031)
城市彩红外遥感影像具有分辨率高、地物细节明显和数据量大(含有地理信息的数据更是海量)等特点。在这类影像中,存在同一类地物在不同的光照条件下,会表现出不同光谱特征的现象,称之为同物异谱,反之称之为同谱异物。在高分辨率城市彩红外遥感影像中存在着大量的阴影区域,在这些阴影区中,会出现同物异谱的现象。比如,阴影区绿地与非阴影区绿地的光谱特征不完全一致,阴影区绿地颜色比较暗,而非阴影区域色彩比较明亮。在彩红外遥感影像处理中,阴影是主要干扰源,通常的遥感图像处理技术已不能很好地满足这类遥感影像的增强和聚类处理。图像处理技术没有通用万能的方法,必须根据工程实际需求选择适当的技术方法和模型,以获得较好效果。本文讨论了传统的Retinext算法,并结合色度学知识,构造了MSRHIS 算法,设计消除彩红外影像中的阴影干扰来测量城市绿化覆盖面积的处理方法,其处理技术流程方案如图1 所示。在影像聚类应用中取得了意想不到的效果。
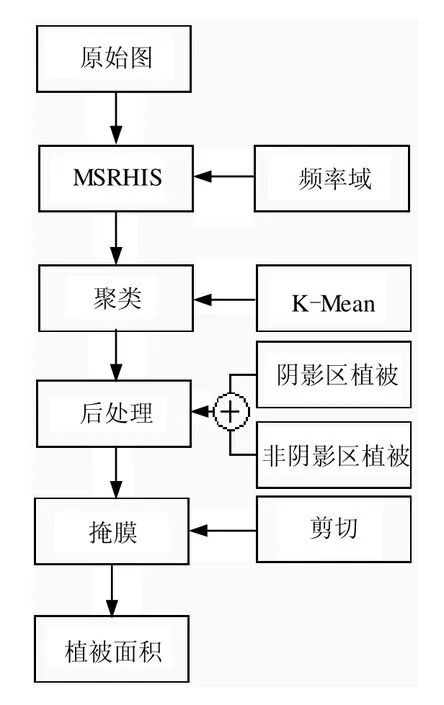
图1 影像处理流程图
1 Retinex 理论
Land 和McCann 于1971 年提出了视网膜皮质层理论(Retinex Theory)[1]。Land 先生在工作中发现,当人眼观察物体时,所觉察到的颜色,并不仅仅是物体所反射的光谱能量等物理量,而是透过物体色彩之间的光亮度的比较得到的色彩感觉。这种感觉是由视网膜和脑皮质层共同完成的,视网膜就好比相机中的胶片把外部的影像记录下来,脑皮质层来负责解释这些影像记录,两者的共同作用使人获得对物体颜色的感觉,所以Land 先生取Retina(视网膜)和Cortex(脑皮质层)两个单词的首尾组成了新的单词Retinex。
该理论主要包含了两个方面的内容[2-3]:人的视觉对物体颜色的感知是由物体对长波(红)、中波(绿)和短波(蓝)光线的反射能力综合起来决定的,而不是由反射光强度的绝对值来决定的;另一方面,物体表色不受光照的非均匀性影响,具有色彩恒常。
1.1 Retinex 算法
Land 先生首先提出了Retinex 的自由路径算法[3],但该算法的缺点是计算量大[4]。针对以上情况Land 先生提出中心/环绕空间域对比运算(Center/surround spatially opponent operation,简称:Retinex 中心/环绕算法)[4]。中心/环绕算法给出了很好的人眼视觉模拟,该算法与灵长类动物的视网膜和大脑皮质层神经元的神经生理学函数相关。该算法在非校准设备的色彩补偿(Gamma 校正)、色彩恒常处理、动态范围压缩和图像增强等方面都得到了应用。
据此Jobson 等学者提出了单尺度Retinex(SSR:Single-Scale Retinex)算法[5-7],Hurlbert先生对以高斯函数为卷积算子的中心/环绕算法进行深入地研究,其算子表达式

SSR 和MSR 算法处理后的彩色图像,对其色彩的再现性表现的比较差,仍需要进行色彩补偿或色彩恢复。因此,Z Rahman 和D J Jobson等学者提出了MSRCR(the Multi-Scale Retinex with Color Restoration)算法[8]。该算法给出了色彩恢复函数,该函数提供了的全局色彩恢复,函数中的增益常数和控制非线性增强系数,可以用来调节图像三个波段的比例,这些参数可以通过实验来确定其取值。Jobson 等人通过实验,确定了函数中所涉及到的参数[8]。图2 显示了不同的 Retinex 算法对彩红外遥感影像处理的结果。
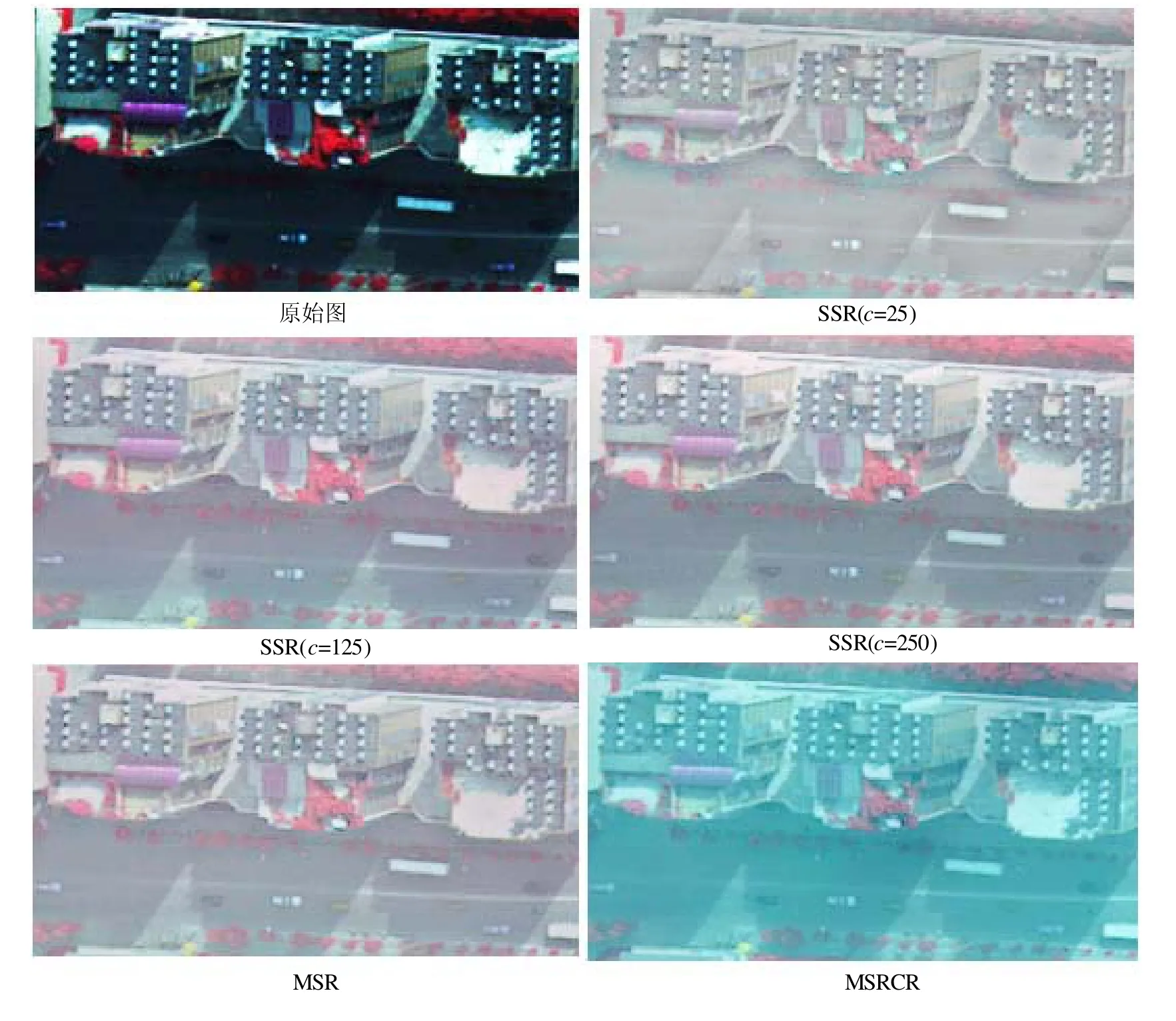
图2 Retinex 的不同算法的实验结果
图2 显示,所处理影像的结果并不理想,其色彩没有得到较好的增强,存在一定色彩失真,尤其是植被的色彩,这不利于影像聚类,提取植被的覆盖面积。下面换个角度来考虑Retinex 理论,以寻求新的解决方法。
1.2 MSRHSI 算法及实验结果
以上的讨论都是基于RGB 色彩空间,其空间特点是坐标系统非常简单,但存在不足之处:① 该空间的色彩由R、G、B 混合比例定义,难以用准确的值来表示,所以不易于定量分析;②该彩色空间中的彩色通道之间相关性很高,其合成图像的饱和度偏低,色调变化较小,图像的视觉效果较差。即使相关性较高的图像作对比度扩展,通常也只是扩大了图像的明亮程度,对增强色调差异作用较小;③ 人眼是通过感知颜色的亮度、色调以及饱和度来区分物体,不能直接感受R、G、B 三色比例。另外色调和饱和度的关系是非线性的,因此RGB 空间中对图像进行分析与处理,难以控制其结果。
因此,考虑把图像转换到HSI 色彩空间,来探讨其效果如何?彩色可以用色调(Hue)、饱和度(Saturation)和亮度(Intensity)3 个要素来描述,组成的HSI 彩色空间,在该空间中,3 个分量具有相对的独立性,可分别对它们进行控制,能够定量地描述颜色的特征。把图像从RGB空间转换到HSI 空间,对图像的亮度或饱和度进行处理,而保持其色度不变,应用结果显示,阴影区亮度得到增强,且其中地物色彩的饱和度也得到增强,尤其在影像(彩红外)中红色得到增强,有利于提取植被信息,这也符合人类视觉感知,人在识别物体的时候,光的强度影响不大,往往是根据物体的色调,且色调也是地物所具有的一种特征,这也符合色彩恒常。另外,在提取植被信息时,应尽量增强植被的特征,抑制非植被的信息,工程应用中,提取信息所采用的影像是大样本,所以对地物细节不需太多关注,在此设计了MSRHSI(the Multi-Scale Retinex in HSI)算法模型,其流程如图3 所示。

图3 MSRHSI 算法流程图
该算法处理的结果如图4(b)和图5(b)所示,其中图4 是从图5 中截取的局部图。图中显示MSRHSI 图像色彩恢复的比较好,其细节也得到了保留,也有某些少数地物的色彩有点失真,但红色得到增强。在对整幅图像进行目视分析,可以看出该图中植被信息得到了很好地增强,比较容易进行聚类,这一点正是工程所需要的。MSRHSI 结果图显示,阴影对影像产生的影响得到削弱。目视分析发现,影像中紫色和黄色地物也有增强的趋势,在对彩红外影像作NDVI(“归一化差值植被指数”Normalized Difference Vegetation Index)处理中,紫色地物是提取植被信息的主要干扰源,文献[9]讨论了如何消除两者对提取植被信息的干扰。另外,本项目的研究是以工程应用为目标的,效率在设计处理方案时也是必需考虑的因素之一。在中心/环绕算法中,影响到算法处理结果的是卷积算子,算法中的卷积运算是必不可少的。但是,卷积运算在处理遥感影像时,其效率是很难被接受的,并且与卷积模板的大小存在相关性,在SSR 和MSR 算法中,尺度与模板大小又影响到处理结果。
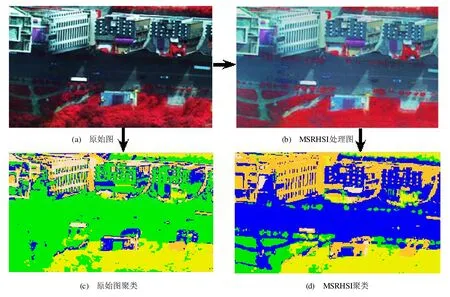
图4 MSRHIS 算法处理图聚类对比效果图
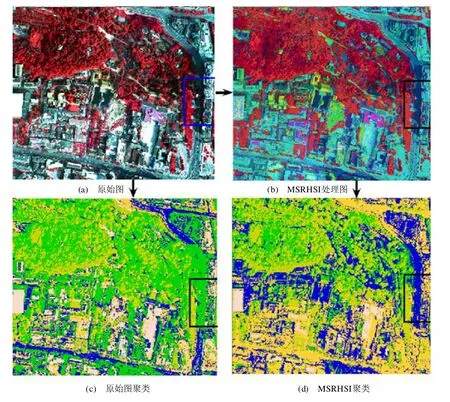
图5 MSRHIS 算法处理图聚类对比效果图
针对以上问题,为了解决工程效率的问题,使算法可以在实际工程中得到应用,在方案设计中,利用卷积定理,把空间域中的卷积运算,变换成频率域中乘法运算,从而提高了其运算效率,使算法效率与模板大小无关,确保工程效率仅与工程量相关而与算法无关。在频率域处理一幅2048×2048 影像(格式:BMP)仅需约25 秒的时间(软件环境:操作系统为WIN2003,软件是在Visual C++ 2005.net 环境下自行开发;硬件环境:CPU 是AMD 2800+,内存为512M,独立显卡128M 显存)。表1 给出SSR 不同卷积模板大小所耗费的时间(Matlab 与VC++混合编写的程序处理时间)。

表1 不同模板的SSR 所消耗时间对照表
聚类的关键是特征波段选择,选择波段时,要考虑波段之间的相关性[10],本项目选择近红外和绿色波段作为特征波段。图4 和图5 所显示的聚类的结果,采用了K-Mean 算法,初始类别数为5,迭代次数为16 次。该图的显示表明,经过MSRHSI 算法处理过的影像的聚类,比原始影像的聚类结果要准确的多,图4(a)和图(d)对照可以看出阴影中的地物被识别出来,在聚类中,被归到相应的类别。另外,在前面提到过紫色地物对植被信息的提取会产生影响,在对原图和聚类结果图进行对照比较发现,在MSRHSI 处理图中的紫色地物基本被归为一类,和植被区别开来。图5 显示了整个样本区的处理结果,阴影区的植被和非阴影区植被也被归到相应的类别中。把这两个类别合并,制作成提取植被信息的掩膜,另外,图6 显示,阴影区中行道树被识别出来。
利用其掩膜可以提取彩红外影像中的植被信息。方案流程如图1 所示。利用图5(d)的聚类结果或图6 的掩膜,可以算出样本区的植被覆盖面积,见表2 末行数据,样本区的面积约为1951118 平方米,其覆盖率约为42.0%。
对原始图作监督分类,类似草坪的植被区易于识别,但在林区存在零碎的阴影,在这部分区域,虽然操作者可以主观判别之,但很难选其为样本训练区,这样就造成了大量的植被信息被丢失,在阴影区中,地物存在异物同谱现象,人的主观判别就存在偏差,所以,表2 中监督分类行的阴影中的植被统计面积就少了很多,表中第3行数据表明利用原始影像聚类所得到结果,远远超过实际的植被面积,聚类没能够将阴影中的不同地物区分开。

图6 由MSRHSI 聚类图得到的植被掩膜

表2 监督分类(原始图)和聚类结果 单位:m2
2 总 结
在彩红外遥感影像处理中,Retinex 可以得到很好的应用,其算法核心是卷积算子的选择,高斯函数具有相当的普遍性,并且正态分布是自然界中最普遍的分布。另外,高斯函数的傅利叶变换仍为高斯函数,根据卷积定理,可以把算法中的卷积运算从空间域转换为频率域的乘法运算,这样可以减少工程运算量,实现工程效率与工程量相关,而与算法无关。在影像处理中,没有通用的方法,在项目中,采用分层提取的思想,先提取干扰源的信息(阴影区和紫色地物),再利用算术等运算提取所需要的信息,避免了不同地物之间的相互干扰。总之,在实际工程应用中,要综合各种成熟的理论技术来构造技术复杂度低和可操作性强(即达到实际工程效率的需求)的处理方法模型,来解决工程中的实际问题。
[1] Land E H, McCann J J. Lightness and retinex theory [J]. Journal of the Optical Society of America, 1971, 61(1): 1-11.
[2] Edwin H Land. The retinex theory of color vision [J]. Scientific American, 1977, 237(6): 108-129.
[3] Land E. Recent advances in Retinex theory and some implications for cortical computations [J]. Proc. Nat. Acad. Sci., 1983, 80: 5163-5169.
[4] Edwin H Land. Recent advances in Retinex theory [J]. Vision Research, 1986, 26(1): 7-21.
[5] Rahman Z. Properties of a center/surround Retinex, part 1: signal processing design [R]. NASA Contractor Rep. 198194, 1995.
[6] Jobson D J, Woodell G A. Properties of a center/surround retinex, part 2: surround design [R]. NASA Tech. Memo. 110188, 1995.
[7] Daniel J Jobson, Zia-ur Rahman, Glenn A Woodell. Properties and performance of a center/surround Retinex [J]. IEEE Transactions on Image Processing, 1997, 6(3): 451-462.
[8] Daniel J Jobson, Zia-ur Rahman, Glenn A Woodell. A multi-scale retinex for bridging the gap between color images and the human observation of scenes [J]. IEEE Transactions on Image Processing, 1997, 6(7): 965-976.
[9] Wang Zi-wu, Xie Ya-long, Ma Yuan-jiao, et al. Measuring urban vegetation ratios for kunming city areas from infrared color aerial photographs[C]//IEEE International Conference on Information Acquisition, 2006, 2: 1101-1106.
[10] 王子武, 靳 锦, 解亚龙, 等. 基于TM影像自动提取昆明城区区域变化信息的应用[J]. 云南大学学报(自然科学版), 2006, 28(6): 492-496.
猜你喜欢
河北地质(2022年2期)2022-08-22
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
文苑(2020年11期)2020-11-19
科学大众(2020年17期)2020-10-27
中国诗歌(2019年6期)2019-11-15
电子制作(2019年7期)2019-04-25
现代园艺(2017年23期)2018-01-18
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
光学精密工程(2016年3期)2016-11-07
