
码垛机器人应用、故障处理及性能优化
2009-08-25 09:37张印
新媒体研究 2009年15期
张 印
[摘要]介绍工业机器人的应用,着重介绍码垛机器人在烟草行业应用的故障现象及如何解决,并提出性能优化方案。
[关键词]码垛机器人 烟箱 码垛 拆垛 故障 性能 程序 优化 物流自动化
中图分类号:TP2文献标识码:A文章编号:1671-7597(2009)0810020-02
一、概述
随着工业自动化水平的不断提高,工业机器人的应用也越来越广泛。主要应用于汽车工业、电气机械制造业、航空航天工业、化工工业、建筑业、海洋开发以及其它行业。工业机器人在我国烟草行业的应用出现在90年代中期,卷烟厂采用码垛机器人对其卷烟成品进行码垛作业,用AGV(自行走小车)搬运成品托盘,节省了大量人力,减少了烟箱破损,提高了自动化水平。
二、工业机器人在烟草行业的应用
我国烟草行业多年来不断加强技术改造,促进技术进步,重点卷烟企业的生产设备已达到国际90年代水平。先进的生产设备必须配备与之相应的管理方法和后勤保障系统,才能真正发挥设备的高效益,如卷烟原、辅料的配送,就需要先进的自动化物流系统来完成,传统的人工管理,人工搬运极易出错,又不准时,已不能适应生产发展的需要。因此大多烟草企业采用工业机器人来搬运成品、辅料,取得了很好的效果。目前烟草行业使用的工业机器人有:直角坐标式机器人、关节式机器人和极坐标式机器人。
(一)成品码垛
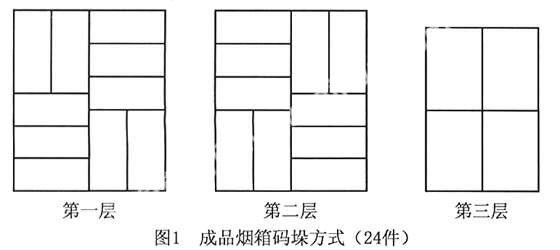
烟草行业使用的托盘一般采用1000×1200×150(mm)的木制托盘或塑料托盘。每个托盘码垛成品烟件数分别有20、24、28和30件,我们常用的是24件。其码垛方式见图1。
机器人的布置方法有以下几种:1.一台封装箱机对应一台码垛机器人。其优点是装封箱机出来的成品可直接进行码垛,无需进行品牌识别;缺点是机器人利用率低。2.一台机器人码垛两种品牌的成品。关节式机器人由于码垛效率高,可同时对两种品牌的成品进行码垛。为了区分品牌,需要设置条码识别器,通过条码识别器辨认品牌后,机器人可自动码垛到相应托盘上。3.一台机器人多个码垛工位。在品种多流量小的情况下,一台机器人可完成多种品牌的码垛作业,关键是在机器人作业范围内布置多个托盘用来码垛。但机器人周围码垛托盘越多,空间就越紧张,布置难度也就越大。
(二)成品拆码
成品拆码是将机器人码垛好的成品托盘,在发货时由机器人来拆码。拆码的技术难度要大于码垛,主要原因是原码垛好的托盘由于烟箱变形以及在输送过程中的振动,使成品托盘变形,造成每一个拆码成品托盘都会偏离理想位置,这就要求机器人的适应范围要大。另外,由于拆码托盘是烟箱紧靠烟箱,机器人的手爪无法插入两烟箱之间,使夹持烟箱成为问题。解决的办法是采用真空吸盘吸拿烟箱,因此对于烟箱的质量(如表面光滑程度、气密性、箱子的强度等)要求就提高了。
(三)拣选辅料
一种品牌卷烟有十几种辅料,可在仓库作业区将这些辅料按一定的比例搭配到一个托盘上,然后送至卷接包机组生产。这一配搭工作,可以采用机器人来完成。通常是将各种辅料托盘输送到指定站台,然后由移动式机器人来进行品种拣选,由于辅料品种多,形状各异,因此机器人带有图象识别系统和多功能机械手,机器人每到一种辅料托盘就可根据图象识别系统“看到”的辅料形状,采用与之相应的机械手抓取,然后放到搭配托盘上,实现卷烟辅料的搭配作业。
烟草企业使用工业机器人情况

三、目前,码垛机器人在大型卷烟厂应用最为广泛。码垛机器人的故障处理与性能优化
1.码垛机器人在抓烟过程中,由于有些烟箱破损或烟箱抖动导致短暂时间撒气,真空度检测检测到真空度不够,机器人停止。此种情况一般处理方法为,手动取下这两件烟箱,然后再修改码垛工位、机器人操作屏相关参数,重新启动机器人。这样操作起来麻烦而且停机时间较长。为了更好地解决这种故障,使这种情况能更好更快地得到处理,可以采取以下两种措施:
(1)降低手爪在旋转时的速度,使机器人在摆臂时动作轻柔缓慢。优化方法为:机器人转换为手动状态,view——numdate——speeddate——Vmaxload,后调低旋转速度参数V-ori的数值。
(2)对原程序进行优化。原程序用的是ultraedit32软件,对其程序我们可以用C语言、记事本等一般的程序进行阅读或改写。原程序为:
TPWrite " ************************************** ";
TPWrite " ******** ";
TPWrite " **** The Cigarette Box was lost **** ";
TPWrite " ******** ";
TPWrite " ************************************** ";
TPWrite " Please remove the box ! ";
TPWrite " The robot will move to home position.";
TPWrite " If do not move, please move it by hand ";
TPWrite " And restart robot again,choose Pallate!";
rMoveHome;
IEnable;
EXIT;
ENDTRAP
现改为:
TPWrite " ************************************** ";
TPWrite " ******** ";
TPWrite " **** The Cigarette Box was lost **** ";
TPWrite " ******** ";
TPWrite " ************************************** ";
TPWrite " Please Choose how to do! ";
!TPWrite " The robot will move to home position.";
!TPWrite " If do not move, please move it by hand ";
!TPWrite " And restart robot again,choose Pallate!";
TPReadFK nNextDo,"Continue or return Home? ","Run","","Home","","";
IF nNextDo=1 THEN
nNextDo:=0;
StartMove;
IEnable;
ENDIF
IF nNextDo=3 THEN
nNextDo:=0;
IEnable;
rMoveHome;
EXIT;
ENDIF
ENDTRAP
程序优化后,再出现类似情况,示教器显示:the boxes is lost,“run” or “home”?此时由操作人员查看情况,如无异常则按“run”继续运行即可,大大降低了劳动强度,缩短了故障维修时间,提高的设备运行效率。
2.码垛机器人手爪到基座连有一根长的气管和电缆,来控制手爪的运行。由于手抓要经常性地来回扭动,气管和电缆经常会破裂或折断,更换或维修耗时长,而且每换一次气管或线缆都要重新调整其长短和固定位置,费时费力。改进措施:一是把原用直径约35mm的粗气管更换为直径为20mm的细的而且柔性较好的软气管。二是对连接至手爪的电缆线进行改造,在基座和手爪部位各装上通用接插头,中间的连接电缆两端也做好合适的接插头,多做好几根中间备用电缆,这样电缆被扯断后可直接更换。改造后故障率大大降低,也节约了维修时间,提高了设备有效作业率。
3.码垛机器人在工作过程中有可能不抓烟造成成停机,也有可能抓一件烟或有一件掉落而不停机,造成整垛少烟箱的现象。原因是真空度检测灵敏度调得不精确,过高或过低造成的。这就要求我们在机器人抓取烟箱时多做几次试验,准确调整真空检测灵敏度,使掉烟箱既能停机又能保证把正常的烟箱抓起。
四、结束语
机器人在烟草行业的应用,替代了繁重的体力劳动,极大地减轻了工人的劳动强度,提高了搬运质量,减少了烟箱破损,是实现烟草工业自动化的重要设备。随着烟草物流自动化的发展,工业机器人在行业的应用范围将会越来越大。
参考文献:
[1]IRB机器人简介及操作维修说明,上海ABB工程公司,教材编号:CZ001.
作者简介:
张印(1972-),男,汉族,山东省胶州市人,大学本科,工学学士,山东中烟工业公司青岛卷烟厂卷包车间,工程师,研究方向:机电自动化,电气维护,技术改进,信息处理。
猜你喜欢
华声文萃(2021年4期)2021-04-29
文萃报·周二版(2020年48期)2020-01-07
奇闻怪事(2018年9期)2018-09-28
世界热带农业信息(2017年5期)2017-10-23
世界热带农业信息(2017年4期)2017-07-28
世界热带农业信息(2017年3期)2017-07-13
世界热带农业信息(2017年3期)2017-07-13
商(2016年32期)2016-11-24
财会学习(2016年19期)2016-11-10
青年与社会(2016年18期)2016-10-25
