
基于CAN总线和分布式结构的船舶电站多种发电方式仿真
2009-04-17 03:13夏永明刘佳佳
上海海事大学学报 2009年1期
关键词:CAN总线
夏永明 刘佳佳
摘 要:为进行船舶电站仿真系统中多种发电方式联合运行的研究及管理、操作、训练,实现多个学员的同时教学和实操,克服集中型仿真系统缺点,对船舶电站多种发电方式联合运行仿真采用分布式结构,由下位机完成各自的柴油发电机组、轴带发电机组、透平发电机组的仿真,并由上位机实现电力管理,通过CAN总线通信实现多种发电方式联合运行.对CAN总线运行过程中偶尔出现通信失败的状况进行分析,从而改进CAN总线通信接口硬件/软件的设计,提高CAN总线性能,使其更好地运用于该仿真系统.结果表明该设计方法提高仿真设备的实时性、可靠性,改善系统性能.
关键词:船舶电站; 多种发电方式; 分布式结构; CAN总线
中图分类号:TM31; TP274; TP393; N945文献标志码:A
Simulation on multiple power-generating approaches of
marine power station based on CAN bus and distributed structure
XIA Yongming, LIU Jiajia
(Merchant Marine College, Shanghai Maritime Univ., Shanghai 200135, China)
Abstract: To implement the study, management, operation and training of union operation of multiple power-generating approaches in marine power station simulation system, realize the teaching and operation for several students at the same time, and overcome the disadvantages of centralized simulation system, distributed structure is used to implement the simulation system for union operation of multiple power-generating approaches in marine power station. In this system, the simulation of diesel generators, shaft generators and exhaust-gas turbine generators is implemented in bottom machines, while the electric power is managed by upper machines. The union operation of multiple power-generating approaches is implemented by network communication based on CAN bus. Through the analysis on the network communication failures that occasionally happen in CAN bus, the hardware/software of CAN bus communication interfaces is designed more reasonably and the performance of CAN bus is improved. So the improvement makes CAN bus better applied in the simulation system. The results show that it enhances the real-time capability and reliability of the simulation equipment and the system performance is improved.
Key words: marine power station;multiple power-generating approaches;distributed structure;CAN bus
0 引 言
随着航运事业的发展和科学技术的进步,越来越多的船舶电站发电形式,除以柴油机作原动力的发电方式外,还有船舶推进主机轴带发电机发电方式和废气透平发电机发电方式.3种发电方式经济效益以及其组合方式是世界各国航运界关心和研究的问题.
为适应节能和安全航行,轴带发电机工作状态可以转换,既可发电,又可驱动推进器,提高船舶安全性,是个值得研究的新内容.另外,轴带发电机发电方式和废气透平发电机发电方式因控制设备较复杂,操作、管理方面要求较高,需对学生和船员进行教学培训.因此,需对船舶电站多种发电方式联合运行进行仿真.该系统采用分布式结构,与实际控制设备一致,在可靠性、灵活性以及可维护性等方面,与集中型计算机仿真系统相比具有明显的优越性.
[1]
1 船舶电站仿真系统基本组成
根据发电机组的实际设备、热力系统、电气系统及电力生产过程等建立数学模型,并在计算机上运算,通过I/O接口与电站物理效应设备,即电站的报警、监视、操作和控制等设备相连接构成仿真装置.船舶电站仿真系统全部功能在硬件基础上由软件实现,系统设备构成见图1.

(1)仿真微型计算系统.它是仿真系统的核心和基础,包括工控机、单片微型计算机和通信接口系统.
(2)监视仿真设备学员台.使管理人员熟悉DCS和DAS 2种不同的监视和控制方式,可以同时对多个学员进行培训.
(3)主配电屏和应急配电屏.二者是仿真系统的物理仿真模型,是培训人员和仿真发电机组之间与真实船舶电站完全一致的人机交互界面.
(4)环境仿真.包括声响、灯光等设备.电网失电,小应急、大应急照明状态直接通过灯光表现,利用多媒体技术用音响仿真发电机组运行,使人产生身临其境的感觉.
(5)教员台.教员通过其来控制仿真运行,设置各种仿真故障,指导学员培训及记录培训操作过程.
仿真系统一般还包括用来开发、调试、修改和维护仿真软件的工程师站,在本系统中为简化设备,不专设工程师站,其功能由计算系统中的工控机工作站实现.
船舶电站仿真硬件系统中,工控机和单片微型计算机由CAN总线连接,单片机控制系统可独立完成对船舶电站各不同类型发电机仿真设备的控制,而工控机和学员台电站监视控制设备由以太网连接,通过有关网络通信软件实现.另外,船舶电站仿真系统既可独立进行仿真,又可置于轮机模拟器作轮机机舱整体仿真,主机仿真系统和副机仿真系统也通过以太网连接.
本文主要介绍分布式仿真系统的CAN通信接口软/硬件结构,对现有CAN总线接口和软件设计进行改进,进一步发掘CAN总线控制器功能,提高现有CAN总线性能.
2 仿真系统的CAN总线结构
2.1 CAN总线的智能节点
CAN总线由节点和通信链路组成.船舶电站仿真系统的节点有上位机、下位机2种.在分布式系统中,上、下位机分工明确,下位机负责数据采集、现场处理和通信,上位机通常以Windows系统为操作平台进行综合管理.下位机主要有嵌入式单板电脑,可编程控制器PLC,DSP和单片机.由于单片机体积小、生产量大、技术成熟,主要应用于控制领域,因此习惯把单片机称为微控制器(MicroController Unit,MCU).在船舶电站分布式仿真中,下位机选择单片机.[2]
2.1.1 合理的MCU方案
8051单片机应用时间长,应用面广,且新型8051单片机在技术和集成度上大幅提高;各种串口的集成使得单片机能更好地与外部通信;在线下载、在线可编程和在线调试等技术的出现,大大方便系统的开发和调试.因此,采用国内流行的基于89C52单片机的控制板对多种发电方式联合仿真的船舶电站进行分布式控制,提高可靠性,改善系统性能.开发平台采用Keil C51 μVision 2,用C语言编程,支持A51宏汇编,内嵌的仿真调试软件可采用模拟仿真和实时在线仿真的方式,嵌入式编程容易.
2.1.2 MCU外围器件
实现数据采集系统(Data Acquisition System,DAS)监视和控制方式仿真需要用物理-数学仿真方法.将系统的一部分以数学模型描述,并将其转化为仿真计算模型;另一部分以实物(或物理模型)方式引入仿真回路.
为实现仿真的真实性,必须在控制面板上安装各种仪表、数字显示装置、开关和指示灯,通过I/O接口连接到微机系统,实现物理仿真.单片机I/O接口中主要有:开关量I/O接口、D/A转换接口、键盘控制芯片和液晶显示模块.
2.1.2.1 D/A转换接口设计
配电板有各种仪表涉及到D/A转换接口设计,如发电机控制屏上的功率表、电流表、电压表和频率表.对于输出通道模拟,目前最普遍的是片/路方式.由于仪表较多,如采用片/路方式,价格将倍增,因此采用单片/多路方式,接口使用HI-506多路转换、AD585样值采样保持、LF444驱动输出.数据在传送到转换器前先写到锁存器中,这样数据可以分别载入,但分时转换.为保证转换驱动输出的电压或电流稳定不变,在多路转换开关电路之后接入AD585样值保持电路,并定时对保持的数值刷新.
控制屏上各种仪表的输入电量不同、数值的范围也不同,这里采用统一的4~20 mA电流表,按要求设计功率表、电流表、电压表和频率表表面,既达到仿真要求,又使I/O接口输出信号标准统一.如果选择0~10 V或0~5 V电压表可使I/O接口电路更简单,但由于导线电阻和接点的接触电阻等原因影响仪表显示数值,从而影响仿真效果.因此,电量设置为4~20 mA电流.
2.1.2.2 液晶显示器设计
液晶显示器作为用户界面接口给用户传递视觉信息.液晶显示器有很多种,在中规模图形液晶显示模块中,内置T6963控制器的MGLS240128液晶显示模块目前较为常用.为使用MCU操作,采用1片512 KB的存储器存储全部的国标16×16点阵、8×16的ASCII码点阵以及汉字语句编码数据.
MGLS240128模块由液晶显示控制器T6963C等组成,其最大的特点是具有独特的硬件初始值设置功能,显示驱动所需的参数如占空比因数、驱动传输的字节数/行以及字符的字体选择等均由引脚电平设置,这样在初始化上电时就基本完成设置,软件操作的主要精力就可以全部用于显示画面的设计.
2.1.2.3 开关量I/O设计
控制面板上除仪表、数字显示装置、调节旋纽外,还有大量指示灯、选择开关和按钮开关,这些都是开关量的I/O.开关量对应计算机内的1位(bit)二进制数表示,处理这些开关量要注意隔离驱动和压缩I/O端口,这样可以减少设备投资.
输出开关量主要用于指示灯,控制强电执行电器.指示灯(指示运行工况和故障情况)一般工作电压为12~24 V,工作电流大于50 mA,所以这些开关量的输出必须隔离驱动,用光电耦合器件和外围驱动器如MC 1411和MC 1413等;对于控制强电通断,选用过零双向可控硅型光电耦合器,其干扰少并可以省去中间继电器,能减少触点故障、提高设备可靠性.
在仿真器中,按钮开关和选择开关的作用是给微机输入1个状态位置信号,供微机进行仿真,只需用0 / 1两个状态表示开关通/断,即用“0”表示通,“1”表示断,从功耗和抗干扰性能上来说较好.
选择开关通过接线实现编码,接线在不同位置时形成不同编码,如1个8挡选择开关,可用3位二进制编码表示8个选择位置,这样可省去5个开关量;按钮开关则设计1种多位开关数据信息输入电路,将矩阵行线作为设备信息,矩阵列线作为操作信息,整个仿真器可节省很多开关量.
2.2 通信接口
2.2.1 通信方式选择
从目前解决单片机间中长距离通信的诸多方案看,RS485总线通信模式具有结构简单、价格低廉、通信距离和数据传输速率适当等特点,但存在自适应和自保护功能脆弱等缺点,常出现通信失败甚至系统瘫痪等故障,其处理错误的能力明显不如CAN总线等更为先进的现场工业总线.
CAN总线具有下列特性:多主站依据优先机进行总线访问;非破坏性的基于优先权的总线仲裁;远程数据请求;配置灵活;全系统的数据相容性;错误检测和出错信令;发送期间若丢失仲裁或由于出错而遭破坏的帧可自动重发送;暂时错误和永久性故障节点的判别以及故障节点可以自动脱离CAN总线.
基于CAN总线通信可以对传送的信息帧设定不同的优先级,通过总线仲裁机制使高优先级的信息能优先传送,增加CAN总线通信的实时性,并且CAN总线协议有良好的检错措施,因此CAN总线通信的可靠性较高.[3]虽然CAN总线通信可靠性很高,但如果通信接口硬件/软件设计不合理,也会出现通信失败和系统瘫痪等问题,造成仿真系统性能下降.本文对CAN总线通信接口硬件/软件进行合理设计,改进现有技术,提高CAN总线性能,使其更好地用于船舶电站多种发电方式的联合运行分布式仿真系统.
2.2.2 CAN总线的接地和隔离措施
电子系统的接地是个非常关键却又经常被忽视的问题,接地处理不当会导致系统工作不稳定甚至危及系统安全.[4]对于CAN总线也是如此,尤其在工作环境比较恶劣的情况下,对接地的要求更为严格.关于接地问题,典型的错误观点是认为CAN总线采用差动式工作,通信链路不需要信号地,只需简单地用1对双绞线将各个接口的CANH 和CANL端连接起来.这种方法有以下2方面的问题:
(1)共模干扰.CAN总线采用差分方式传输信号,系统只需检测两线之间的电位差.但是,要注意收发器只有在共模电压不超出一定范围的条件下才能正常工作,超出范围就会影响通信的可靠性,甚至损坏接口.
(2)电磁辐射.驱动器输出信号中的共模部分需要1个返回通路,如果没有1个低阻的返回通道(信号地),就会以辐射的形式返回源端,整个总线就会像1个巨大的天线向外辐射电磁波.
因此对于CAN总线,1条低阻的信号地必不可少,可以是额外的1对线(非屏蔽双绞线)或者是屏蔽双绞线的屏蔽层.当共模干扰源内阻较低时,会在接地线上形成较大的环路电流,影响正常通信,可采取以下3种措施: (1)考虑在接地线上加限流电阻限制干扰电流;(2)采用浮地技术;(3)采用隔离接口.本文采用屏蔽双绞线和隔离接口方法,用ADμM1201数字隔离器件, 既降低系统功耗,简化系统结构,又增加系统稳定性,提高系统性能和抗干扰能力,这些措施对低频率的共模干扰有很好的保护作用.对于高频瞬态干扰,可以在CANH 和CANL 与地之间加旁路电容予以防护.
2.2.3 CAN 总线系统智能节点通信接口设计
图2为CAN 总线系统智能节点MCU通信接口硬件电路原理,主要由4部分构成:MCU 89C52,独立CAN 通信控制器SJA1000,CAN总线收发器82C250和ADμM1201数字隔离器. 89C51 负责SJA1000 的初始化,并通过控制SJA1000 实现数据的接收和发送等通信任务.
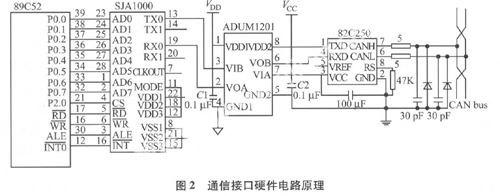
SJA1000 的CS 连接到89C51 的P2.0, P2.0 为CPU 片外存储器地址,可选中SJA1000, CPU 通过这些地址对SJA1000 执行相应的读写操作,INT 接89C52 的INT0,89C52可通过中断方式访问SJA1000.
为了增强CAN 总线节点的抗干扰能力,SJA1000 的TX0 和RX0不直接与82C250 的TXD 和RXD 相连,而是通过隔离芯片实现总线上各CAN 节点间的电气隔离.
通常,CAN总线隔离采用光耦合器技术,用光束来隔离和保护.iCoupler(iCoupler Products with isoPower: Signal and Power Transfer across Isolation Barrier Using Micro-Transformers)是项新专利隔离技术,是基于芯片尺寸的变压器,不是基于光电耦合器LED与光电二极管的组合.iCoupler技术取消光电耦合器中的光电转换过程.由于没有影响效率的光电转换环节,iCoupler数字隔离器功耗只有光电耦合器的1/10~1/50,同时不需要驱动LED的外部电路.另外,iCoupler数字隔离器的隔离通道比光电耦合器具有更高的数据传输速率、时序精度和瞬态共模抑制能力,数据传输速率和时序精度是其10倍.此外,ADI公司继开发出ADμM1100单通道iCoupler数字隔离器后,生产多通道iCoupler数字隔离器ADμM130x和ADμM140x等系列产品,其中二通道iCoupler数字隔离器ADμM1201能在同一芯片内提供正向和反向通信通道,使信号的传输方向更加灵活,简化了芯片间的硬件连接线路.所以iCoupler通道比光电耦合器更有效地实现通道之间的集成以及实现其功能.
ADμM1201数字隔离器不需要任何外部电路,但使用时需在电源和参考地间接入0.01~0.1 μF的电容,以滤除高频干扰,电容和电源之间的距离应该在20 mm以内,以达到较好的滤波效果.
由于2个隔离通道高度匹配,通道间串扰小,并且采用2通道输入输出反向设计,适合CAN总线双向收发的特性,大大简化隔离器与所隔离两端的硬件连接.需要注意GND1与GND2是不同的参考地,否则达不到隔离的效果.
ADμM1201所隔离的两端有各自的电源和参考地,电源电压范围在2.7~5.5 V之间,实现低电压供电,进一步降低系统功耗.
2个电源VCC和VDD必须完全隔离,虽增加节点的复杂度,但是提高节点的稳定性和安全性.
82C250 与CAN 总线的接口部分也采用一定的安全和抗干扰措施,其CANH 和CANL 引脚各自通过1个5 Ω的电阻与CAN 总线相连,起到一定的限流作用,保护82C250 免受过流的冲击;CANH 和CANL 与地之间并联2个30 pF的小电容,可起到滤除总线上的高频干扰和一定的防电磁辐射能力.另外,在2根CAN 总线接入端与地之间分别反接1个保护二极管,当CAN 总线有较高的负电压时,通过二极管的短路可起到一定的过压保护作用.82C250 的RS脚上接有1个斜率电阻,大小可根据总线通信速度适当调整,一般在16~140 kΩ 之间.
上位机工控机上的智能节点设计采用CAN适配卡,由PCI接口,双口RAM,CAN控制器,CAN驱动器组成,并编写CAN通信库函数,在VB中调用库函数Lib可屏蔽对硬件的操作,通信简易快捷.
2.2.4 CAN 总线系统智能节点软件设计
CAN 总线节点的软件设计主要包括CAN 节点初始化、报文发送和报文接收.熟悉这3部分程序的设计就能编写出利用CAN 总线进行通信的一般应用程序.当然,要将CAN 总线应用于通信任务比较复杂的系统,还需详细了解有关CAN 总线错误处理、总线脱离处理、接收滤波处理、波特率参数设置和自动检测以及CAN 总线通信距离和节点数的计算等方面的内容.
2.2.4.1 初始化子程序
SJA1000 的初始化只有在复位模式下才可以进行,主要包括工作方式的设置、接收滤波方式的设置、接收屏蔽寄存器AMR 和接收代码寄存器ACR 的设置、波特率参数设置和中断允许寄存器IER 的设置等.在完成初始化设置后,SJA1000 就可以进行正常的通信.SJA1000 验收滤波器的使用相当灵活,可依据实际情况采用不同的滤波方式.船舶电站仿真系统中有单机和多机并联运行工作情况,CAN 总线要支持广播或组播功能,本文采用双滤波方式,将1个滤波器用作广播或组播地址,提高通信的灵活性.
2.2.4.2 发送子程序
发送子程序负责节点报文的发送,CAN 总线数据段长度最多为8 B,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求.同时,8 B不会过长占用总线时间,保证通信的实时性.发送时须将待发送的数据按特定格式组合成1帧报文送入SJA1000 发送缓存区中,然后启动SJA1000 发送.
当船舶电站工作情况发生变化时,一般引起多个参数变化,传输数据按工况参数来编码,使关系较密切的参数组合在一起,用标志码表示不同工况参数,合理组合参数.参数类型有字节变量、整型变量、单精度变量、双精度变量和字符变量,分别占1 B,2 B,4 B,8 B和多个字节,对于单、双精度变量采用IEEE 754标准编程.
2.2.4.3 接收子程序
接收子程序负责节点报文的接收以及其他情况的处理.接收子程序比发送子程序复杂一些,因为在处理接收报文的过程中,需同时对诸如总线脱离错误报警、接收溢出等情况进行处理.
在CAN初始化时,打开错误报警中断使能IER2和总线错误中断使能IER7,当错误计数器(发送错误计数器和接收错误计数器中的任何一个)计数值超过96时,错误状态SR6置“1”,说明总线被严重干扰,产生错误报警中断.其处理方法是清零所有错误计数器的值,维持CAN运转,但这样做存在局限性:清零错误计数器只是将错误计数器简单清零,不能从根本上消除错误来源;由于错误报警中断产生的条件为错误计数器的值超过96,而总线关闭中断产生的条件为发送错误计数器的值超过255,因此,发送错误计数器引起的错误报警中断可以屏蔽掉总线错误中断.系统由于总响应错误报警中断导致系统不能产生总线关闭,使CAN总线一直处于不稳定状态.
为避免这种情况,可采用如下方法:(1)只打开总线错误中断使能.这样,在总线发生严重错误的情况下,可马上产生总线错误中断,使错误得到及时处理.总线错误中断的处理是复位该节点,重新初始化CAN控制器,消除错误,给节点1个很好的初态;(2)在主程序中读取状态寄存器中当前CAN总线状态.由于CAN总线两条传输线之间的误接触,也易造成CAN总线关闭,使节点无法工作.在主程序中查询状态寄存器中当前CAN总线状态,复位该节点,发出声光信号,及时对不工作的节点进行处理,使节点正常工作.
分布式船舶电站仿真系统的节点通信软件设计分为工控机通信软件和单片机通信软件,共同遵守CAN总线通信规程.由于涉及内容较多,有关内容以后讨论.
4 结 论
船舶电站仿真系统采用分布式结构, 硬件设计标准化,软件设计模块化,使整个系统设计组合较为灵活,这种设计方法对其他项目的研制也具有一定参考价值.在组建网络时,需要进行整体的分析和考虑,既要发挥网络的工作性能、网络接口的调整和优化,还要考虑将来的升级.本文在这方面进行深入试验研究,解决了一些控制技术问题.对于CAN总线智能节点的设计,用ADμM1201代替传统的光电隔离器件,降低系统功耗,简化系统结构,为CAN总线隔离的实现提供1种新的解决方案;关闭错误报警中断,在主程序中读取状态寄存器中当前CAN总线状态, 能及时处理错误.由于本系统在隔离和错误处理等方面采用一系列新的方法,增加系统稳定性,提高系统性能.
船舶电站多种发电方式联合运行仿真系统的研制完成,实现在船舶电站仿真系统中进行任意2种或3种发电方式联合运行的研究及管理、操作、训练,实现多个学员的同时教学和实操.经过运行测试和考核,各项功能和技术性能达到设计要求.
参考文献:
[1]吴勤勤. 控制仪表及装置[M]. 北京: 化学工业出版社, 2004: 228-270.
[2]李刚, 林凌, 王焱. 新概念单片机教程[M]. 天津: 天津大学出版社, 2004: 201-240.
[3]饶运涛, 邹继军, 郑勇芸. 现场总线CAN原理与应用技术[M]. 北京: 北京航空航天大学出版社, 2007: 20-36.
[4]沙占友, 孟志永, 王彦朋. 单片机外围电路设计[M]. 北京: 电子工业出版社, 2007: 412-449.
(编辑 陈锋杰)
猜你喜欢
现代商贸工业(2016年21期)2016-12-26
现代电子技术(2016年22期)2016-12-26
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年18期)2016-11-03
电脑知识与技术(2016年20期)2016-08-19
电脑知识与技术(2016年10期)2016-06-16
电脑知识与技术(2016年7期)2016-05-19
电脑知识与技术(2016年5期)2016-04-14
