发电机出口断路器跳闸对船舶电力系统稳定性的影响
2009-04-08 12:23:46赵楠
中国舰船研究 2009年2期
赵楠
海军工程大学电气与信息学院,湖北 武汉430033
发电机出口断路器跳闸对船舶电力系统稳定性的影响
赵楠
海军工程大学电气与信息学院,湖北 武汉430033
船舶电力系统在故障发生时,发电机出口断路器跳闸对船舶电力系统是一个较大的扰动,网络中不同位置的断路器动作都会对系统稳定性造成不同的影响。数字仿真方法是研究此类动态问题的有效手段。本文利用PSCAD/EMTDC仿真软件平台,对某型船舶电力系统发电机转速及励磁自动调节装置进行了模型及参数仿真验证,并对自定义静态负荷模型以及采用铭牌参数建模的异步电动机模型进行了仿真分析,在此基础上通过时域数字动态仿真的方法,针对某型电力系统的网络结构,以典型的系统运行方式为例,分析了发电机出口断路器分断对电力系统稳定性的影响,并进一步提出为保证系统稳定性,系统运行时应当采用的相关策略。
断路器;分闸扰动;舰船电力系统;稳定性;发动机
1 引言
电力系统是船舶平台极为重要的系统之一,其稳定性直接关系到船上各用电设备的正常工作,关系到船舶使命任务的完成。目前,随着船舶事业的发展,电力系统的容量大幅增加,结构越来越复杂,从而影响船舶电力系统稳定运行的因素错综复杂,电力系统稳定性问题已经成为倍受关注的重大课题。
鉴于电力系统在全船的重要地位,因此要求电力系统必须具有保护功能,即在故障发生时,立即切断故障区域,以保证最大限度范围的供电连续性[1]。此类保护都是通过断路器分断实现,这些分断操作对船舶电力系统是一个较大的扰动,网络中不同位置的断路器动作都会对系统稳定性造成不同的影响[2-4]。近几年在陆上多次出现过由于发电机的故障跳闸致使系统失稳,从而导致大面积甚至是全面停电的严重事故,在船舶上这一问题更为突出。
2 两、三、四机系统跳闸仿真
船舶电力系统中系统发电容量和负荷水平相当,运行过程中出现发电机跳闸对系统运行是非常严重的扰动。这里以系统典型的两机、三机以及四机系统工况为例,通过仿真研究发电机无故障跳闸对系统运行稳定性的影响[5]。
考虑系统的初始负荷水平均为系统运行发电机容量的70%~80%。负荷考虑静态负荷和异步电动机负荷,其中异步电动机负荷占总负荷的70%左右,重要异步电动机负荷按照单台设备建立仿真模型。
对两机系统,考虑单台机跳闸的扰动情况,对于三机和四机子系统,分别考虑单台机跳闸和2台机跳闸的扰动情况。
2.1 两机系统发电机跳闸仿真
对该型电力系统某典型两机系统建立初始稳定运行状态,稳定运行时2台发电机实际总出力占发电机额定容量的75.73%。在61 s时其中一台汽轮发电机突然跳闸,系统频率和主配电板电压的暂态仿真结果分别如图1、图2所示。

从仿真结果可以看出系统频率、各主配电板上的电压均出现严重的波动,无法稳定运行。这是由于系统中原有的所有负荷由剩下的一台发电机供电,系统出现较为严重的过载现象,过载程度超过50%。因此,对于两机系统正常带70%左右负荷的情况下,出现单台发电机跳闸,系统将由于严重过载而难以维持稳定运行,必须迅速采取措施(如分级卸载)来保障系统可靠运行。
2.2 三机系统发电机跳闸仿真
对该型电力系统某典型三机系统建立初始稳定运行状态,稳定运行时3台发电机实际总出力占发电机额定容量的70%。
1)单台发电机组跳闸时系统的运行特性
系统运行在初始稳定状态,66 s时1台发电机组突然跳闸,系统中原有的所有负荷由剩下的2台发电机组供电,此时负载功率占发电机组额定总出力的105%,加上系统的功率损耗,发电机将运行在过载状态。系统频率、主配电板电压、最远端负荷节点电压的暂态仿真结果,如图3~图5所示。

从仿真结果可知,若3台并联运行发电机组中有1台发电机组突然跳闸,系统仍能稳定运行。故障后由2台机组拖动系统的全部负载,此时发电机输出的总功率为3 368 kW,过载11.23%。发电机的转速下降后稳定在0.988 98,系统恢复稳态的时间约为5~6 s。
在发电机组突然跳闸引起的暂态过程中,发电机转速波动的最低点为0.988 24,1号电站主配电屏电压波动的最低点大约为356.6 V,4号电站主配电屏和电压波动的最低点大约为350.1 V。最远端负荷节点的电压波动的最低点为347.16 V,都满足暂态性能指标的要求。
由此可知,对于所研究的典型三机系统,初始负荷水平70%的条件下,1台发电机组跳闸后,系统仍能恢复稳定运行,稳态电压和频率满足稳态要求,暂态过程中系统频率和电压的波动也满足暂态性能指标的要求。
2)2台发电机组跳闸时系统的运行特性
在1台发电机组跳闸的前提下,再次出现1台机组突然跳闸,仿真结果如图6、图7所示。
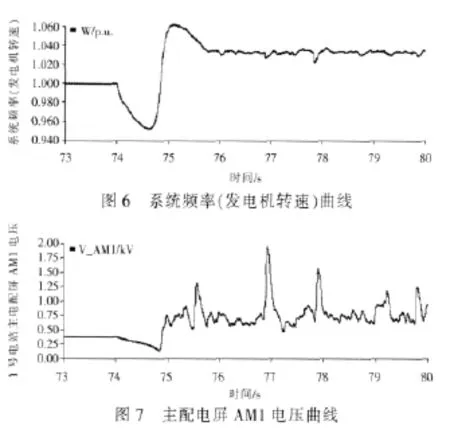
显然,三机系统连续失去两台发电机后,如果不采取负荷卸载或者其他措施,系统不可避免地因为过载而失去稳定。
2.3 四机系统发电机跳闸仿真
对该型电力系统某典型四机系统建立初始稳定运行状态,稳定运行时4台发电机实际总出力占发电机额定容量的70%。
1)单台发电机组跳闸时系统的运行特性
系统运行在初始稳定状态,其中1台汽轮发电机组突然跳闸,系统中原有的所有负荷由剩下的3台汽轮发电机组供电,此时负载功率占剩余3台发电机组额定总出力的93.3%,加上系统的功率损耗,发电机可能接近或刚超过满载运行。
系统频率、各电站主配电板以及最远端负荷节点的电压暂态仿真结果如图 8~图10所示。
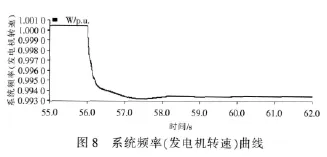

从仿真结果可知,若4台并联运行发电机组中有1台发电机组突然跳闸,系统仍能稳定运行。故障后由3台机组拖动系统的全部负载,此时发电机输出的总功率为4 473 kW,剩余的3台发电机已经接近于满载。发电机的转速下降后稳定在0.993 4,系统恢复稳态的时间约为4~5 s。
稳态时2号、3号和5号电站的主配电屏和各主配电板以及最远端负荷节点的稳态电压和故障前的稳态相比都有大约3.1 V的下降。在1台发电机组突然跳闸引起的暂态过程中,发电机转速波动的最低点为0.993 1,2号、3号和5号电站主配电屏和各主配电板电压波动的最低点分别为368 V、368 V和364 V。最远端负荷节点的电压波动最低点为206.5 V(变压器原边电压波动的最低点为363.5 V),都满足暂态性能指标的要求。
由此可知,对于该典型工况四机子系统,初始负荷水平为发电机额定容量70%的情况下,出现1台发电机组无故障跳闸,系统经过一个动态过程后仍能恢复稳定运行,稳态电压和频率将有少许的下降,但仍满足稳态要求。暂态过程中,系统频率和电压的波动也满足暂态性能指标的要求。
2)2台发电机组跳闸时系统的运行特性
在1台发电机组跳闸的前提下,再次发生1台机组突然跳闸,仿真结果如图11、图12所示。


由上图可知,初始负荷平均水平70%的条件下,四机系统连续失去2台发电机后,由于系统出现严重过载,如果不采取分级卸载措施,系统将完全失去稳定。
3 自动卸载控制策略对提高系统运行稳定性的作用
由上述仿真分析可知,系统初始负荷平均水平在额定出力70%左右的条件下,发电机组跳闸事故将会导致原系统出现过载现象,此时如果过载程度不大,如原来3台或者4台发电机出现单台跳闸事故,系统仍可以继续稳定运行,只是系统频率和系统中各节点电压将较原跳闸前有所降低。但如果过载程度比较严重,如原来3台发电机组出现2台发电机跳闸,此时若不采取及时合理的措施,如突卸负载以减轻剩余发电机的过载程度,系统将无法继续稳定运行。
以下针对典型两机系统、三机系统和四机系统,通过仿真研究自动卸载控制策略对于维持系统稳定运行的作用,一次性卸载负荷量以及卸载时间是其中的关键问题。
3.1 两机系统过载状态下的卸载控制方式
按照初始负荷达到并列运行发电机额定出力的70%以上的负荷水平考虑,典型两机系统出现1台发电机跳闸后,剩余1台发电机将严重过载,故需要通过负荷卸载,使系统能够维持稳定运行,并能同时满足暂态指标要求。
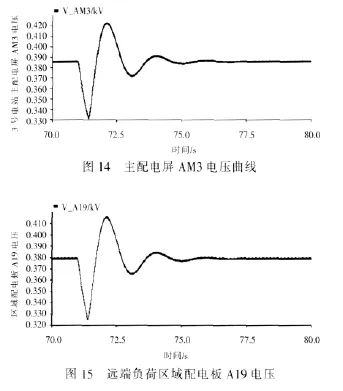
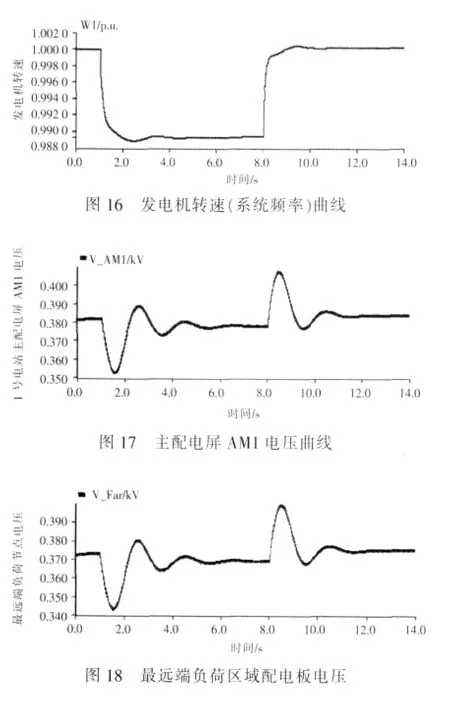
两机系统出现发电机跳闸后为了维持系统运行稳定而进行自动卸载的暂态过程仿真结果如图13~图15所示,分别为系统频率、主配电板电压以及远端负荷节电电压。

卸载负荷量按照剩余负载是按运行发电机额定出力的70%~80%的原则确定,实际仿真算例中,卸载后系统负荷约为运行发电机额定出力的78%。
从图15可以看出,该典型两机系统发生1台发电机跳闸后,采用突卸负荷可以维持剩余发电机组稳定运行。暂态过程中系统频率最大跌落至0.982 5(对应49.125 Hz),卸载负荷后稳定运行频率又可以恢复为1.0(对应50 Hz)。
图16和图17所示的结果表明,采用负荷卸载措施后,系统可以维持稳定运行,并且卸载过程中,主要节点包括电站主配电屏、最远端负荷配电板等的电压波动范围满足系统电压的暂态指标要求。
本算例仿真表明,按照上述突卸负荷的原则,允许负荷切除极限时间为0.39 s,超过该时间后再卸负荷,系统频率和电压波动将不能满足暂态指标要求。
3.2 三机系统过载状态下的卸载控制方式
1)轻度过载时卸载控制方式
由2.2节中的分析结果可知,三机系统按照平均负荷水平70%~80%运行时,如果出现1台发电机跳闸事故,系统可能出现轻微过载,能够维持稳定运行,系统稳态频率和主要节点稳态电压将有所降低。
但是这时系统处于一种稳定极限状态运行,也就是说系统几乎没有稳定裕度。如果再次发生发电机跳闸或者其他性质的扰动,将导致系统失去稳定。因此也有必要考虑通过自动负荷卸载来提高系统运行的稳定裕度。
图16~图18给出了该型船舶典型三机系统出现发电机跳闸事故后采用自动卸载控制的暂态仿真结果,分别为系统频率、主配电板电压以及远端负荷电压。该典型系统初始负荷水平为系统发电机额定出力的77%,1台发电机跳闸后,系统承受了约6%的过载负荷,能够维持稳定运行。
为了提高系统稳定运行的裕度,按照上述负荷卸载原则,通过卸载一定量的负荷,使得跳闸后剩余的2台发电机的总出力为额定出力的70%~80%。从以上仿真结果可以看出,暂态过程中系统频率和电压均满足系统暂态性能指标要求。通过自动负荷卸载控制能够使得系统稳态性能指标恢复到接近系统正常水平。
2)严重过载时卸载控制方式
按照上述负荷水平,三机系统跳两台发电机以后将出现严重过载,故需要及时采取措施来减轻发电机的过载程度,使系统能够恢复稳定运行,并满足暂态指标要求。
典型三机系统发生2台发电机跳闸后采用自动卸载控制的暂态过程仿真结果如图19~图21所示。算例系统初始负荷水平达到全部运行机组额定出力的77%,发生2台发电机跳闸事故后,按照前述卸载原则,使得跳闸后剩余负荷约为1台发电机额定出力的75%,系统可以维持稳定运行。
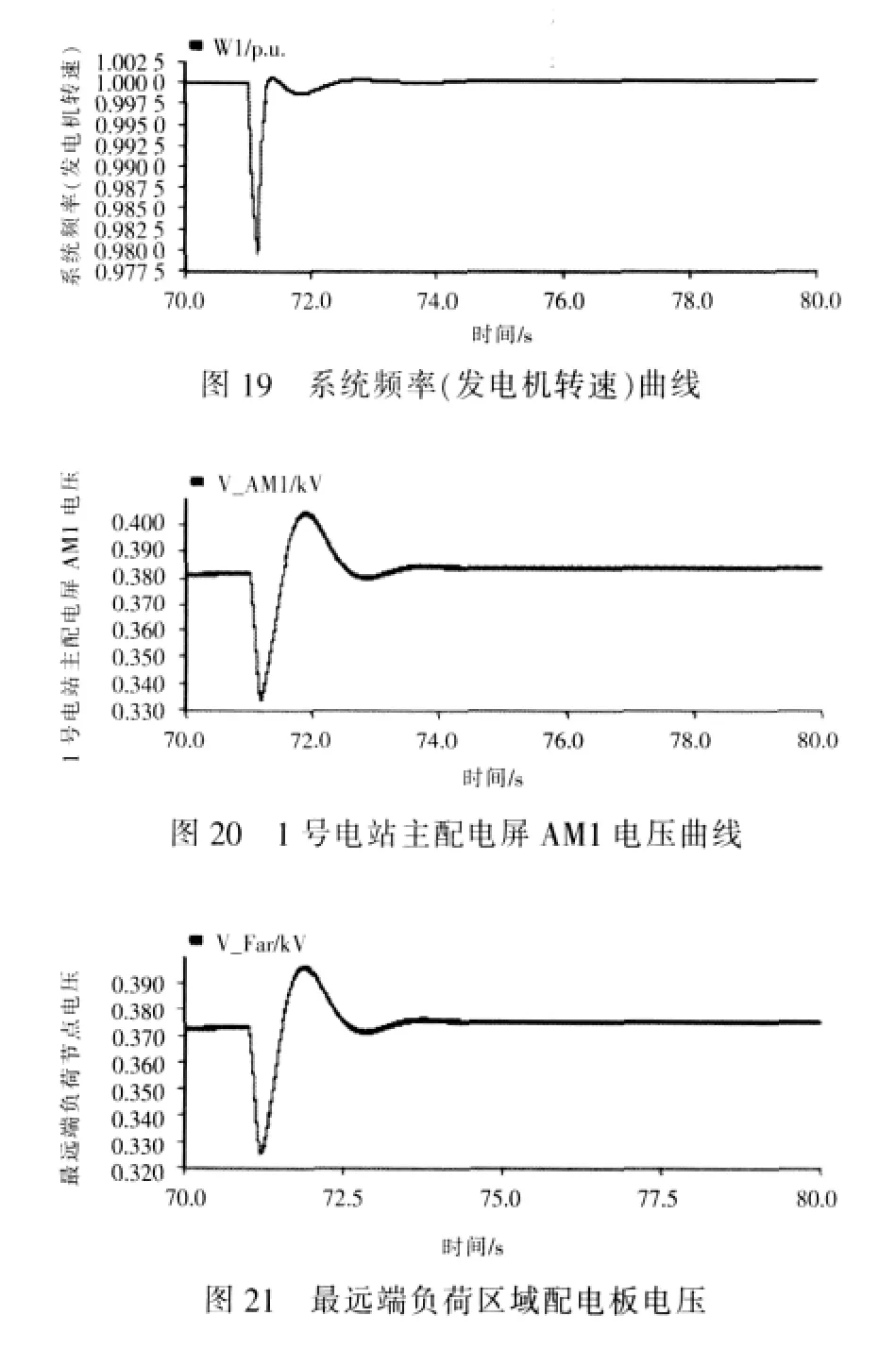
图19给出了系统频率的变化情况。暂态过程中频率最大跌落至0.979 6(对应48.98 Hz),切除负荷后稳定运行频率为1.000 3(对应50.015 Hz)。
从图20和图21可以看出,按照上述原则进行自动卸载控制,系统稳态和暂态电压满足运行性能指标要求。
仿真结果表明,突卸负荷的极限切除时间为0.16 s,超过该时间系统将不满足暂态指标要求。
3.3 四机系统过载状态下的卸载控制方式
四机系统在负荷水平为运行机组额定出力70%~80%的前提下,如果出现1台机组跳闸,系统接近满载运行,能够维持稳定。2.3节的仿真结果也说明了这一点。但是如果出现2台发电机跳闸事故,系统将出现过载运行状态,并且难以维持稳定运行,因此以下讨论后一种情况的自动卸载控制问题。
四机系统跳2台发电机以后已经严重过载,故需要及时采取措施来减轻发电机的过载程度,使系统恢复稳定运行,并满足系统暂态指标要求。
考虑2.3节中的典型四机系统算例。系统初始稳态运行时负荷约为机组额定出力75.5%,发生2台发电机突然跳闸后,系统将出现超过40%的严重过载,前述仿真结果表明系统不能稳定运行。以下考虑通过突卸一定量的负荷,使得跳闸后剩余的2台发电机承担的负荷仍约为其额定容量的70%~80%。仿真结果如图 22~图24所示。
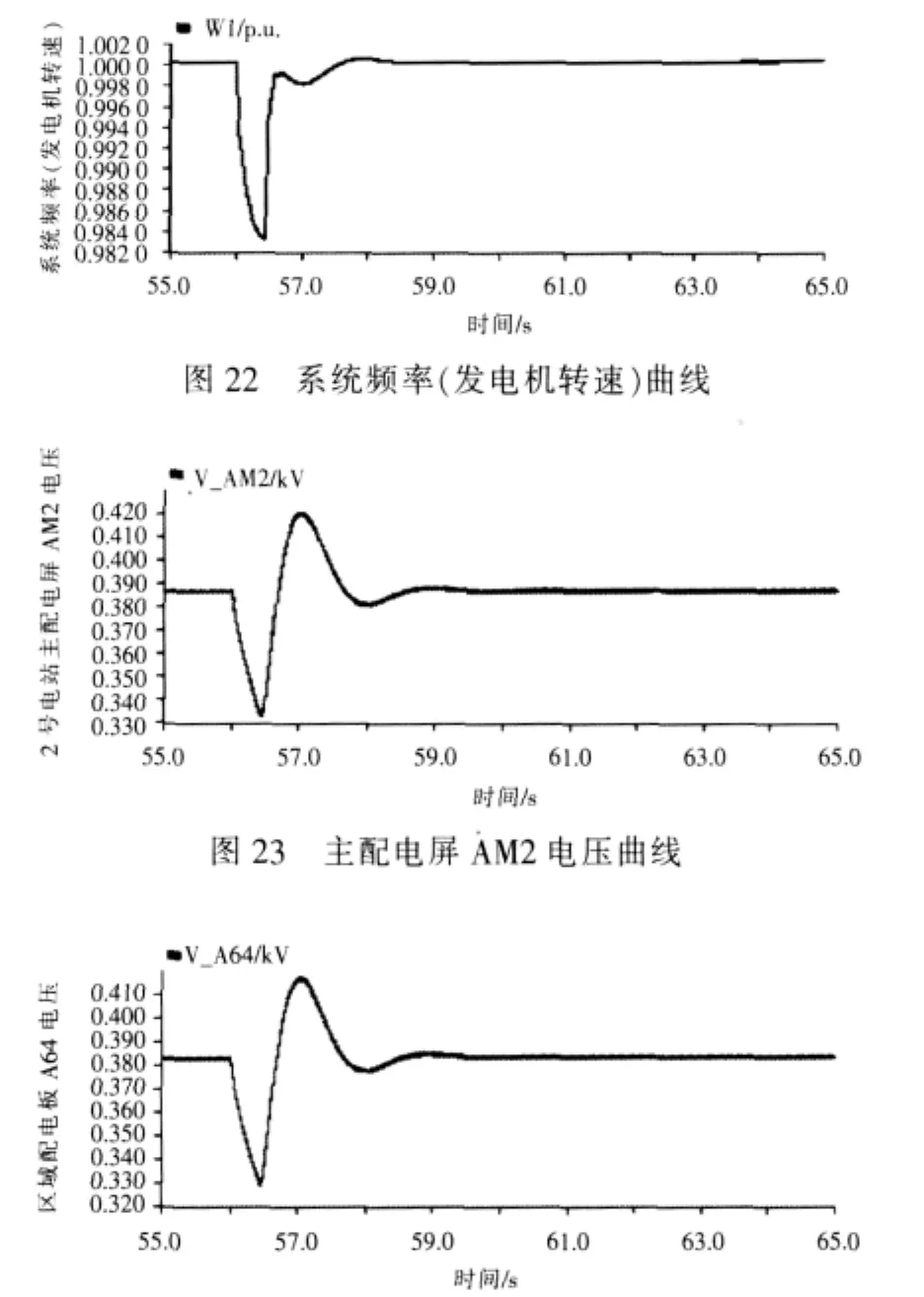
图24 远端负荷区域配电板A64电压
图23所示为系统频率变化的暂态过程,可见采用负荷卸载控制后,系统能够维持稳定运行,系统频率的稳态和暂态性能指标均满足要求。
图24和图25分别给出了主配电屏和远端负荷区域配电板上的电压变化情况,稳态电压和暂态电压偏移也都能够满足系统运行性能指标要求。仿真研究表明,突卸负荷的极限时间为0.44 s,超过该时间系统将不满足暂态指标要求。
4 结论
断路器分闸扰动是船舶电力系统运行过程中的一种典型扰动方式。本文基于对船舶电力系统建模工作的基础,通过时域数字动态仿真的方法,研究了发电机跳闸对系统运行稳定性的影响,以及自动卸载控制策略对提高系统运行稳定性的作用。主要结论如下:
1)系统过载是导致系统难以维持稳定运行的主要原因。系统负荷水平按照运行机组额定出力的70%~80%考虑,单台发电机出口断路器跳闸将引起两机系统因严重过载而难以维持稳定运行。对于三机和四机系统,则由于系统剩余机组具有一定的可调节容量,单台发电机跳闸不会出现严重过负荷而导致失稳,但是如果是2台发电机跳闸事故,则会引起系统严重过载从而导致失稳。
2)自动卸载控制是防止系统由于过载失稳的有效方法。卸载容量和卸载控制时间是关键问题。按照卸载后系统负荷占发电机组额定出力70%~80%的原则考虑卸载容量,可以有效地保证系统维持稳定运行。卸载控制时间则与具体的系统过载程度有关。
本文通过数字仿真研究典型两机、三机、四机系统的发电机出口断路器跳闸对船舶电力系统运行稳定性问题的影响,分析的前提是系统初始负荷水平为系统额定发电容量的70%~80%。卸载容量的确定原则按照维持事故后系统负荷水平为系统额定发电容量的70%~80%。所得结论具有一定的参考意义。由于实际船舶电力系统的运行工况复杂多变,考虑系统可能存在的极限负荷情况,需要根据具体情况进行详细的仿真分析。但本文所建立的数字仿真平台仍然适用。
[1]孙诗南.舰船电力系统的研究与设计[M].北京:国防工业出版社,1990.
[2]韩祯祥.电力系统稳定[M].北京:中国电力出版社,1995.
[3]佘贻鑫,陈礼义.电力系统的安全性和稳定性[M].北京:科学出版社,1988.
[4]刘金波.舰船电力系统暂态稳定性分析[D].哈尔滨:哈尔滨工程大学,2002.
[5]袁仪山.带交流和整流负载的三相同步发电机系统的稳定性[J].船电技术,2001,21(5):16-20.
Impacts of Generator Breakers Trip on the Stability of Ship Power System
Zhao Nan
College of Electrical and Information Technology,Naval University of Engineering,Wuhan 430033,China
As the malfunction happens in the Ship Power System (SPS),tripping operation itself is a large disturbance to the system,which may causes undesired system instability if it is not operated at appropriate place and time.This thesis is devoted to detailed digital simulation of one defined SPS to disclose effects of breaker tripping operation to the system.Modeling of the generator,cables,transformer and load are discussed using PSCAD/EMTDC.Since the detail parameters is unavailable,the exciter and governor model of the generator are tested with typical parameters,which is verified to meet the technical requirement of SPS defined by relevant military standards.Motor model using nominal parameters rather than detail electric parameters is also testified to be accurate.Based on the model established,the effects of generator trip to SPS stability is studied with typical system conditions.Load shedding measure is proposed and verified by detailed digital simulation,which is proved to be effective.
circuit breaker;tripping operation;ship power system;stability;generator
U665.12
A
1673-3185(2009)02-59-06
2008-09-01
赵 楠(1982-),男,硕士研究生。研究方向:船舶电力系统。E-mail:zhaonan3516@163.com
猜你喜欢
山东冶金(2022年4期)2022-09-14 08:59:30
大电机技术(2021年5期)2021-11-04 08:58:28
铁道通信信号(2019年2期)2019-03-26 06:39:58
电子制作(2018年14期)2018-08-21 01:38:28
电子测试(2017年23期)2017-04-04 05:07:02
通信电源技术(2016年4期)2016-04-04 02:57:28
西部广播电视(2015年17期)2016-01-18 03:46:23
中国交通信息化(2015年1期)2015-06-05 03:43:32
新疆钢铁(2015年3期)2015-02-20 14:13:56
中国交通信息化(2014年6期)2014-06-05 03:12:06