拱泥机器人的运动分类及控制
2007-01-28 08:05
船海工程 2007年6期
(武汉理工大学 物流工程学院,武汉 430063)
在沉船底部进行穿千斤作业是沉船打捞中的关键工序,目前我国普遍采用手动攻泥器,由潜水员手工操作[1]。如何实现穿千斤作业的自动化目前还是一个世界性难题。近年来,国内几所科研院所对此提出了几种机器人的设计方案[2-6],但这些方案对机器人在水下淤泥中的受力复杂性尤其是尾部组合缆巨大的反拖曳力考虑不足。
根据目前沉船打捞中穿千斤作业条件设计了一种水下仿生拱泥机器人[7],能在水下恶劣的“泥”环境中自行蠕动,并能调节其运动方向和路径、代替潜水员完成水下穿千斤作业,其运动控制是一项关键技术。为此,提出即将机器人的复杂运动分解为自律运动和姿态调整,并分别采用程序控制和人工控制模式。
1 功能及原理
该控制使机器人在水下泥土环境中按预定轨迹从沉船底部一侧钻入,再从另一侧钻出;并随时根据检测到的方位和工况信息调整运动方向和运动姿态,拖动千斤引绳横穿沉船底部,完成穿引千斤的作业任务;当前进中遇到不可穿越的障碍物时,可变向绕行;或将机器人的蠕动循环反向控制,便能实现反向蠕动,即沿进入的路线退回。
总体结构见图1,主要由三部分组成,头部:攻泥头;中部:仿生蠕动躯体;尾部:组合缆接口。

图1 拱泥机器人的总体结
头部攻泥头用于将前方冲出一段孔洞,攻泥头和躯体间设有用于推动攻泥头前移并调节攻泥头冲击方向的液压机构。攻泥头能使冲击活塞在静液压下自行产生高频往复周期振动,具有结构紧凑、能量利用充分和位移快速的优点。
仿生蠕动躯体由三节组成,节间由轴向蠕动伸缩油缸和方向调节器连接,每节圆柱表面装有若干个高弹性的可充放油的橡胶“胎”(膨胀套),用于模拟径向鼓缩蠕动,整个躯体模仿蚯蚓的蠕动爬行原理,逐节蠕动跟进,从而实现机器人的蠕动前进,见图2。

图2 自律运动示意
尾部组合缆接口用于连接和牵引组合缆(由电缆、油管、气管和引绳组成)随动前进,并具有防止机器人自旋的装置。
机器人的运动可分为自律运动和姿态调整。
对于这两类运动,所采用的控制模式不同。拱泥机器人采用程序控制与人工控制相结合的控制模式,并均由液压机构执行。对于自律运动,采用程序控制模式,确保各部分严格按照动作节拍逐节运动。对于方向与姿态调整,采用人工控制模式,即由操作员根据检测系统提供的有关力、环境、位姿等方面的信息,在水面工作船上的控制台上下达控制指令。
2 自律运动的控制
自律运动由机器人的各节按照严格的自律节拍,相互配合,逐节跟进完成。一个循环周期的动作组成自律运动的最小单元。这种周期性的动作可分为五个节拍,见表1。
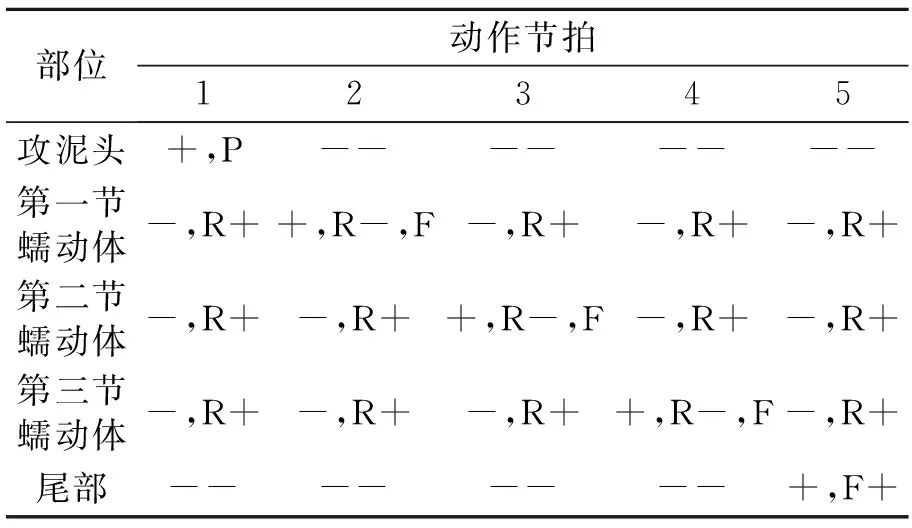
表1 自律运动节拍表
注:+-做某个动作;--保持某种状态;---无动作等待状态;P-攻泥推进动作;F-轴向跟进动作;R+/R--径向膨胀/收缩动作
从表1中可以看到,在节拍1和节拍5,机器人所受到的轴向反冲击力和反牵引力最大,故有三节蠕动体均保持径向膨胀状态,以提供最大的静摩擦力。而在其它节拍,始终有两节处于膨胀支撑状态,为正在收缩跟进的那一节提供静摩擦力。
在自律运动过程中,机器人是否始终具有足够的轴向静摩擦力来稳固自身,是自律运动能否使机器人前进的关键。
对于饱和淤泥质粘土,光滑圆柱面与孔壁泥土间的单位摩擦力f为5~1.5 kN/m2[8]。单节蠕动体膨胀时的直径D=0.35 m,有效长度L=0.8 m,则单节蠕动体在光滑表面条件下能提供的静摩擦力F1至少为4.4 kN。
F1=πDL·f
式中:f取5 kN/m2。
在长江边(武汉段)的淤泥中所做的现场试验证实了这个计算数据,而且当圆柱表面被绑上汽车轮胎橡胶片时,静摩擦力将增大4倍以上。
于是,三节蠕动体能提供的静摩擦力F3至少为52.75 kN
F3=12F1
同理,可以计算尾缆的静摩擦力。设尾缆直径d=0.1 m,沉船跨距l=25 m,则尾缆的最大静摩擦力Ft为39.25 kN。
Ft=πdl·f
可见,三节蠕动体能够为机器人提供充足的轴向稳固力。
由于在相同条件下两物体间的静摩擦力大于滑动摩擦力,而且跟进的那一节蠕动体是在径向收缩后进行滑动的,因此,一节膨胀的蠕动体就能为一节跟进的蠕动体提供足够的静摩擦力。考虑到水下淤泥的复杂性,控制由两节膨胀的蠕动体为一节跟进的蠕动体提供静摩擦力。同理,在攻泥头攻泥和牵引尾缆这两个过程中,则控制由三节膨胀的蠕动体提供最大的静摩擦力来分别抵抗打孔的反冲击力和尾缆的反牵引力。
自律运动由各部分的轴向油缸的伸缩运动以及膨胀套的径向蠕动合成,因此,只要对轴向油缸和膨胀套进行控制就可实现对自律运动的控制,见图3。对油缸和膨胀套的控制是通过对电磁换向阀的集中控制实现的。

图3 轴向伸缩、径向鼓缩及方向调节机
因为自律运动是按固定的工作节拍逐节完成的,故采用程序控制模式,即将各轴向油缸和膨胀套的电磁换向阀的电缆连接到一个程序控制器上,由控制器按照动作节拍的次序顺序控制各个油缸和膨胀套的动作。
3 姿态调整的控制
姿态调整是通过节间的方向调节器来完成的。它由4个油缸组成,相对的2个组成一对(彼此互锁),两对之间垂直排列,见图4。

图4 方向调节器
当两对油缸的活塞都处在中位时,调整器的两端面平行,与两端相连的两节躯体是同轴的,呈直线状态。当处于垂直位置的一对油缸活塞杆伸出或缩进时,调整器的两端面就会有夹角,使相连两躯体呈向上或向下弯曲的状态。同理,水平位置的一对油缸,可使相连两躯体呈向左或向右弯曲的状态,将相互垂直的两对油缸加以适当控制使其动作合成起来,可使相连两躯体向任意方向弯曲。因为攻泥头和后面的三节蠕动躯体是由三个方向调节器串成一体的,当三个方向调节器同时朝同样的方向变动时,可使机器人形成一个近似的弧形。
每个方向调节器的最大调节角度γ=10°,取每节长度l=0.87 m,则可计算出机器人的最小转弯半径r为5 m。
在实际控制过程中,方向调节也是按照跟随原理进行的,即每一节的方向角都取前一节的实际方向角,从而使机器人的各部分以最小阻力协调前进。
机器人的有效工作平面应在其预定路径所决定的铅垂面内,见图5。

图5 机器人的有效工作平
当机器人的实际轨迹偏离预定路径时,则启动方向调节机制进行纠正。此外,当它遇到不可逾越的障碍时,则控制它退回一段路程后再调节方向前进,以便绕过障碍。当然,机器人相当于该铅垂面的偏离是需要及时纠正的。
4 结论
对于工作在水下恶劣的淤泥环境中,其运动控制是关键技术。本文提出的机器人运动控制方案简单、可靠可操作性强,具有很好的应用前景等优点。
[1] 姚根福.海上救助与打捞[M].大连: 大连海运学院出版社,1994.
[2] 孟庆鑫,魏洪兴,王立权.基于蠕动原理拱泥机器人方案研究[J].中国造船, 2001, 42(1):64-68.
[3] 魏洪兴,王立权,孟庆鑫.基于蠕动原理拱泥机器人的海洋土力学模型研究[J].哈尔滨工程大学学报, 2000, 21(4):36-40.
[4] 魏洪兴,孟庆鑫,王田苗.拱泥机器人原理样机的研制[J].中国造船, 2003, 44(1):89-93.
[5] 王志林,陈洪财,栾喜庆.拱泥机器人位置检测系统[J].佳木斯大学学报:自然科学版, 2000, 18(4):313-316.
[6] 王志林.蠕动爬行式拱泥机器人的位置检测方法[J].传感器技术, 2001,20(1):16-17.
[7] 张 英, 孙 虎, 胡 勇, 等.水下拱泥机器人方案研究[J].武汉理工大学学报:信息与管理工程版, 2005, 27(4):43-46.
[8] 陈希哲,土力学及地基基础[M].北京:清华大学出版社,1998.
猜你喜欢
科学与财富(2021年35期)2021-05-10
新世纪智能(英语备考)(2020年6期)2020-08-14
文苑(2020年7期)2020-08-12
海峡姐妹(2019年10期)2019-11-23
小天使·六年级语数英综合(2019年9期)2019-11-09
文学港(2019年5期)2019-05-24
文学港(2019年5期)2019-05-24
中国新技术新产品(2016年21期)2016-12-08
诗林(2016年5期)2016-10-25
大江南北(2016年8期)2016-02-27